基于PLC的汽车焊接机器人控制研究
2017-06-16 07:40骆小媛
科学与财富 2017年17期
关键词:控制
骆小媛
河源理工学校 广东省河源市 517000
摘要:随着中国经济的飞速发展和“工业4.0”时代的到来,在自动化、机器人、物联网技术的发展趋势下,焊接生产的自动化与网络化程度不断提高,通过网络连接完成焊接机器人系统的远程监控和管理,对提高焊接工艺管理水平具有重要的意义。目前汽车的白車身焊接生产线通车采用的是精度高、速度快、柔性高的激光焊接机器人。文章以S7-200系列的PLC控制器控制的白车身生产线为例,对PLC控制生产线与焊接机器人高效率、高精度、高柔性的通讯和生产进行详细的论述,为PLC在汽车焊装生产线的应用和推广提供有效的技术支撑。
关键词:PLC;汽车焊接机器人;控制
中图分类号:TP242 文献标识码:A
引言
随着我国工业化和自动化的不断发展,机器人以其高效率、高精度在工业生产中越来越受到青睐。特别是近几年我国的汽车产业自动化程度不断提高,使用机器人进行汽车喷涂不仅节省了很多人力资源,也实现了品质的提升。
1焊接机器人在汽车行业的应用
汽车制造行业的生产节拍较快,轿车的生产节拍一般在100秒左右。汽车制造的焊接工艺对加工过程中制件的焊接精度和速度等指标要求越来越高,焊接时产生的火花、飞溅及烟尘等对人体造成危害,靠人为操作已变得越来越不适合,因此,在焊接工艺过程中使用自动化技术代表的焊接机器人成为汽车制造企业、汽车零部件生产企业的共同需求。用焊接机器人进行自动化操作代替人工操作,不仅提高了操作的稳定性而且提高了焊接质量和生产效率,并且改善了操作者的生产环境等。汽车行业是焊接机器人的最大用户,也是最早用户。焊接机器人是汽车行业应用最广泛的工业机器人。
众所周知,汽车焊接种类多样,焊接工艺要求高,目前自动化焊接机器人在汽车焊接生产中广泛应用在底盘的点焊工艺及零部件总成焊接过程中被焊制件焊缝形状复杂人工不易操作的焊接工位、或者是焊接过程中完成效率不高及工作的焊缝数量较少、长度较长,形状较规矩的焊接工位。汽车生产制造企业依据各企业实际情况,选用适合本企业的自动化焊接生产形式,目前汽车行业中应用最多的是弧焊机器人和点焊机器人。
2 基于PLC的汽车焊接机器人控制研究
2.1车门焊接控制系统及其硬件构成
车门焊接工艺通常包括两台激光焊接机器人和四个焊接工位,第一个工位主要焊接玻璃导槽和防撞杆,第二个工位主要负责焊接铰链加强板和内饰加强板,第三个工位主要负责铰链加强板和防撞杆,第四个工位主要负责焊接外板窗框。车门焊接工艺流程的控制系统主要包括PLC、操作台、夹具、气压回路以及激光焊接机器人等,PLC对整个系统进行控制,其输入信号是操作台的指令和各个传感器的信号,输出信号则由机器人、夹具气缸、电磁阀等来执行,而在整个控制系统工作过程中,对激光焊接机器人的控制是最关键的。
2.2基于PLC控制系统的软件设计
在基于PLC的控制系统中,采用的是模块化的控制,焊接生产线的控制和焊接机器人的控制是相互独立的两个模块,PLC通过串口通讯来协调生产线和焊接机器人之间的关系,程序在实际执行中通过起始符、结束符以及BBC检验码来确保通讯信息的正确性。具体程序控制流程如下:控制系统启动,PLC控制焊接机器人上电复位,然后由系统对夹具位置、行程开关等传感器信号进行检测并与程序中的模块参数进行互相比对,然后由PLC进行逻辑运算后输出相应的指令,调整夹具的位置;夹具夹紧工件后,由PLC控制焊接机器人进行工作,即PLC发出相应的通讯指令,有机器人将指令与自身储存器的相关指令进行比对后,选择合适的模块程序,完成焊接动作和调整,焊接过程中的焊接电流大小、通断时间都是由机器人自身的控制器完成的。
2.3硬件设计
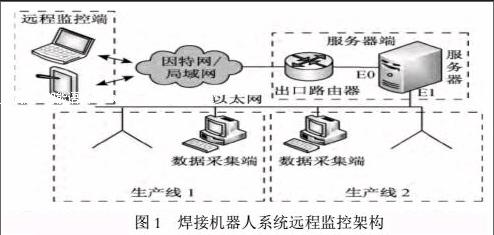
系统的本地端由采集终端PC和多组焊接机器人系统组成。通过焊接机器人系统中的PLC采集焊接机器人状态、焊接电源状态、夹具状态、报警等焊接相关数据。
系统的远程端由出口路由器和服务器组成,主要负责为远程用户提供Web监控服务,并为远程管理员提供VPN服务,方便管理员对采集端以及焊接机器人系统进行升级与维护。
本系统中的服务器通过出口路由器与外界网络连接,使得服务器可对外网用户提供Web服务和VPN服务。本系统使用一台性能较高的PC机作为服务器,搭载Web服务与VPN服务。服务器配有两张网卡EO和E1,如图1所示。EO通过出口路由器连接至互联网,远程用户通过该网口访问服务器提供的Web服务和VPN服务。E1连接至内部局域网络,与采集端进行通讯,获取采集端上传的焊接机器人系统相关数据。
程普通用户使用浏览器通过互联网即可访问远程端的Web监控服务。管理员除了获得Web监控服务外,还可以通过VPN客户端接入本地端的内部局域网,对采集端和焊接机器人系统进行远程配置和维护。
2.4机器人自动化集成技术
生产线设计我们解两个层面,我们要设计自动化生产线,首先要对企业,加工产品的工艺流程,要非常的熟悉。这是第一个层面。就把已有的工艺流程,进行自动化的升级,但是光有这个还不够。我们应根据机器人卓越的特点,对它的工艺流程进行重组和再造。我觉得后面这个意义更大。根据机器人的特点重新考虑它的工艺流程。这样就是涉及到工艺流程的设计。包括生产线的设计,生产线集成。这个时候我们对它关键工艺,机器人技术加智能化技术进行系统集成。关键的工艺现在机器人运用,结合机械制造,主要在焊接运用比较多。冲压方面也有,机械加工,装配工艺这些都用得比较多。这个我们涉及到一系列机器人运用的技术,把工艺流程进行升级,能够再造出更优化的工艺。阀门这里也采用了PLC、工控机等主控机一起来做集成应用。
3喷涂机器人系统的组成及功能介绍
喷涂机器人实际上是一种通过程序发出指令,控制柜启动关闭相应阀门实现喷涂的机械手臂。一般的机器人系统包括以下4个部分:①机械机构部分。②控制系统部分。主要控制驱动系统的动作时间,包括示教再现、信息存储和I/O模块。③驱动系统部分。液压的、启动的、电气的驱动系统。④喷涂执行部分。
受到汽车厂涂装车间布局的影响,我们必须先确定涂装机器人的分布位置,通过合理的定位固定基础底座,这是机器人物理位置的原点。机器人本体是类似手臂通过6或7个连接轴实现轨迹移动的,每一段连续运动轨迹的集合就是车体喷涂所需要的覆盖面积。PLC程序系统是整个喷涂机器人系统的“大脑”,它通过各种控制实现整个环境的运行逻辑,每一步的动作都是设计的主体,相关联的各个条件都有非常强的逻辑关系。当PLC发出指令后,它会调用管理模块中的各种数据,在已经写定的机器人动作前,数据会传送给机器人,实现我们所需要的数值。通信系统实现了每一个模块与“大脑”的数据交换和反馈。如果出现危险或不完善的动作,通信系统就会反馈给“大脑”,发出报警提示。
涂料管路系统就像我们人体的血管,贯穿在机器人的身体内部,它是涂料运输的载体。通过涂料系统能实现涂料的流通。空气管路系统不仅能将涂料从涂料储存罐内打压到管路中,还能实现机器人在动作时候各种阀门的关闭动作,这样可在涂料时开启阀门,不需要涂料时关闭阀门,从而自由支配所需涂料的时间。
结束语
汽车焊接机器人是汽车生产线中常用的一种焊接设备,其控制系统的好坏至关重要。文章对汽车焊装生产线的自动焊接控制进行了具体的分析和研究,为汽车生产线中焊接机器人的使用和推广提供了有效的借鉴。
参考文献:
[1] 陈全,李钢,张仁斌.基于开放式体系结构的弧焊机器人控制系统设计和实现[J].制造业自动化,2004,26(9):36-75.
[2] 范小兰.基于PLC的机械手控制在MCGS中的实现[J].制造业自动化,2012(18):6-8.endprint
猜你喜欢
科技视界(2016年21期)2016-10-17
商(2016年27期)2016-10-17
大众理财顾问(2016年9期)2016-10-11
科技视界(2016年20期)2016-09-29
大众理财顾问(2016年8期)2016-09-28