小型无人倾转旋翼机全模式飞行操纵控制
2017-06-16 10:35闻凯赵彬宇
科技创新与应用 2017年17期
关键词:配平
闻凯+赵彬宇

摘 要:文章根据飞行特点和相关知识建立了倾转旋翼机飞行的数学方程,通过模型确定了小型无人倾转旋翼机在直升、倾转和飞行模式下的通道操纵量和飞行姿态,得出了小型无人机各种状态下的飞行策略。
关键词:倾转旋翼机;配平;解耦控制
2.2 倾转模式飞行
在对小型无人倾转旋翼机在倾转模式下进行配平时,倾角In 從0°变化到90°,前飞速度为16~25m/s,为了抵消桨叶有效迎角减小引起的推力足足问题,应增大桨叶的安装角即增加总距的操纵。前飞速度增大升降舵偏角也会随着增大,在飞机进入倾转后期时,纵向周期变距明显减弱。根据实验结果计算得机翼安装倾角为3°~5°时,倾转过渡模式可以较为顺利的过渡。
2.3 飞机模式飞行
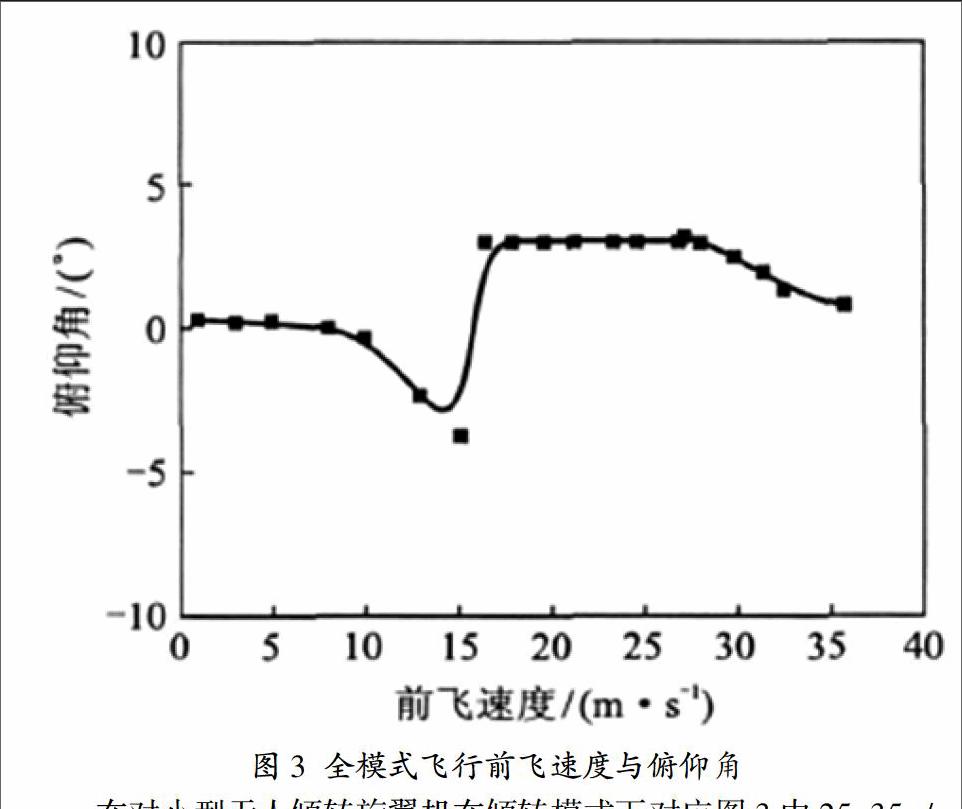
在对小型无人倾转旋翼机在倾转模式下对应图3中25~35m/s。随着前飞速度增大,无人机的机身重力与升力互相平衡飞机平稳向前飞行。飞行的动力由旋翼提供,由于速度不断增加所以总距操纵也相应增加。
图3中俯仰角随随飞速度增加而逐渐减小情况对应,与实际飞机固定翼飞机的飞行特性相吻合,均具有固定翼飞机的飞行特性。
2.4 全模式飞行
对试验所用小型无人机进行各个飞行模式的试飞试验,同时对倾转旋翼机的转换走廊进行研究。小型倾转旋翼机在直升机模式下垂直起飞,协调操纵总距和纵向周期变距是飞机模型进入倾转模式,通过旋翼和水平安定面相互协调操纵保持模型的平衡;主要由旋翼和水平安定面相互协调操纵,同时根据前飞速度对短舱的倾角进行调整;倾角In=90°时模型进入飞机模式飞行,此时模型机翼提供的升力与其重力相互平衡,前进速度由旋翼提供。
3 实际模型设计
最终的实际模型在经历数次试验后经由Solidworks软件进行建模并转换为平面切割图纸后终于制作完成。
由于两轴模式对重心的要求极高,为了适应多种机型重心不同的情况,可选择在尾部安置类似直升机锁尾的变距结构,配套的动力应较主动力小一级别,这样即使重心出现偏差,也可以最大程度上修正平衡。
参考文献
[1]军用旋翼飞行器驾驶品质要求.美国陆军航空设计标准性能规范.ADS-33E-PRF[Z].南京航空航天大学(译),2002.
猜你喜欢
中学化学(2022年4期)2022-06-17
中学化学(2021年10期)2021-12-07
航空维修与工程(2021年9期)2021-10-18
学习周报·教与学(2020年25期)2020-10-21
数学学习与研究(2019年5期)2019-05-08
理科考试研究·高中(2017年7期)2017-11-04
中学化学(2016年6期)2016-08-04
考试周刊(2015年12期)2015-09-10
基础教育参考(2014年10期)2014-12-08
中学理科·综合版(2008年4期)2008-07-15