电传飞行控制系统飞机飞行员诱发振荡机理研究
2017-06-16 22:28张喆韩意新
科技创新与应用 2017年17期
关键词:机理
张喆++韩意新
摘 要:随着航空技术的发展,现代航空器普遍采用高增益电传飞行控制系统,其一方面使飞机飞行品质不断提高,但另一方面又使飞机的飞行动力学特性越来越复杂。美国国家研究委员会对装备有电传飞行控制系统飞机进行了专门研究,结果发现几乎所有部分或全部装备有电传飞行控制系统的飞机在研发过程中都曾遭遇过驾驶员诱发振荡(Pilot Induced Oscillations,PIO)事件[1-2],甚至诱发了严重的飞行事故。PIO已成为威胁电传飞机飞行安全的重要因素[3]。文章以电传飞机人机闭环系统为研究对象,探究电传操纵飞机中诱发PIO产生的关键影响因素,分析人机闭环系统稳定性的变化规律,揭示PIO产生的机理,为新型电传飞控系统设计、试飞等提供参考。
关键词:电传飞行控制系统;飞行员诱发振荡;机理
1 电传飞行控制系统模型
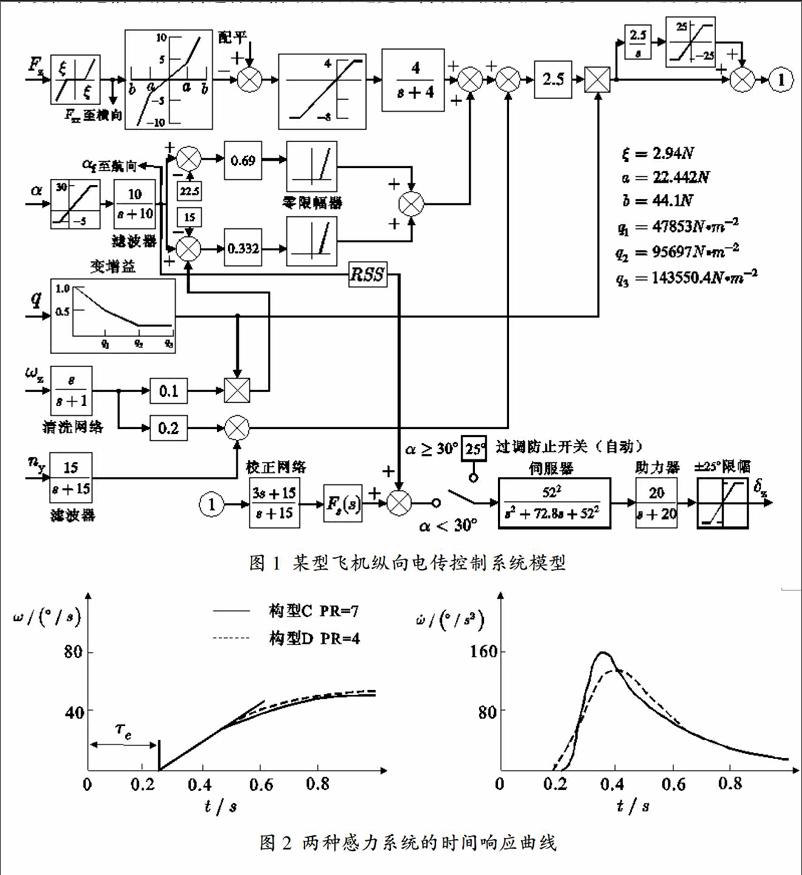
电传操纵系统是指利用电气信号形成操纵指令,通过电线(电缆)实现飞行员对飞机运动进行操纵(控制)的飞行控制系统[4]。工程界比较一致的观点是:“利用反馈控制原理而使飞行器运动成为被控参量的电气飞行控制系统”[5]。某型飞机的电传操纵系统是模拟式四余度电传操纵系统[6],如图1所示,该型飞机纵向电传控制系统组成包括:
(1)电信号指令通路
电信号相较于机械位移信号在传递过程中具有独特的优势:允许按照控制率设计添加各种校正环节,包括典型的位移和速率限制、PID控制、信号滤波、参数调整,幅值和相位补偿与限制等手段,能够方便的设计系统品质。基于电信号的优越传输方式,电传操控系统依靠电信号指令传递各种信号,从而避免了传动机械操纵系统重量大、效率低的弊端。与机械操纵系统的本质区别是,驾驶员通过电传操控系统直接指令飞机的响应,舵面偏转角度和速率仅成为控制环节的中间过程,避免了驾驶员直接操纵舵面带来的驾驶员负荷过大的弊端。
(2)前向通路
前向通路能够提供快速的操纵响应,使驾驶员能够快速感受到飞机的变化。驾驶员给出操纵指令,经滤波器输出后与反馈信号综合(一般包括法向过载、迎角和俯仰角速率),通过迎角等限制环节,进入增益调节环节。随着飞行状态的改变(包括飞行速度和飞行高度等参数),开环增益不断变化,通常通过预设的插值表实现,目的是获得最佳的舵面操纵效率,其作用相当于传统机械操纵系统中的系统力臂调节器。该设计对人机闭环系统的操纵稳定性至关重要。
(3)反馈通路
闭环操纵是确保电传操纵系统稳定的前提条件。对于飞机的纵向运动环节,通常选取法向过载、迎角和俯仰角速率進行反馈。通过前向通路和反馈通路,实现电传操纵系统的控制增稳功能。纵向反馈信号的增益依据飞机构型和飞行状态的不同而插值得出。反馈信号经过滤波器过滤噪声信号并叠加,与前向通路中的过载指令信号综合构成了控制增稳回路。
2 电传飞控系统与PIO的矛盾联系
在电传飞控系统中,对PIO产生影响的系统参数颇多,有的影响系统传输信号的幅值,有的影响传输信号的相位差,有的对两者都有影响。这些潜在的影响因素包括:杆力特性,系统传动系数与增强系统增益,飞行控制模态转换,有效飞机过度时间延迟,非线性因素等。
2.1 人工感觉系统与PIO的联系
具有现代操纵系统的飞机已将气动舵面载荷与驾驶杆进行了隔离,使驾驶员无法感受操纵力的大小,为此需用“人工感觉系统”提供必要的“人工感觉”,模拟驾驶员操纵力与操纵面位置之间的动态反馈关系。
图2是两种感力系统阶跃滚转及滚转加速度的时间响应曲线。其中快感力系统C的响应具有急剧变化的初始加速度,驾驶员飞行品质评分等级为7,并呈现PIO趋势,慢感力系统D的响应加速度峰值较小,并且具有较小的初始延迟滚转加速度变化率。对驾驶员来说,由感力系统滤波器产生的高频衰减是有益的,并使飞行品质明显变好。在两个系统总的时间延迟相同的条件下,后者的驾驶员评分为4级,这表明由于感力系统的这种平滑效应,使时间延迟的允许容限增加了。这些实验数据进一步表明了允许时间延迟看来是初始响府形状的函数。起滤波器作用的感力系统可能减小了加速度的变化率,进而增加了时间延迟的允许容限。
2.2 飞行控制模态转换与PIO的联系
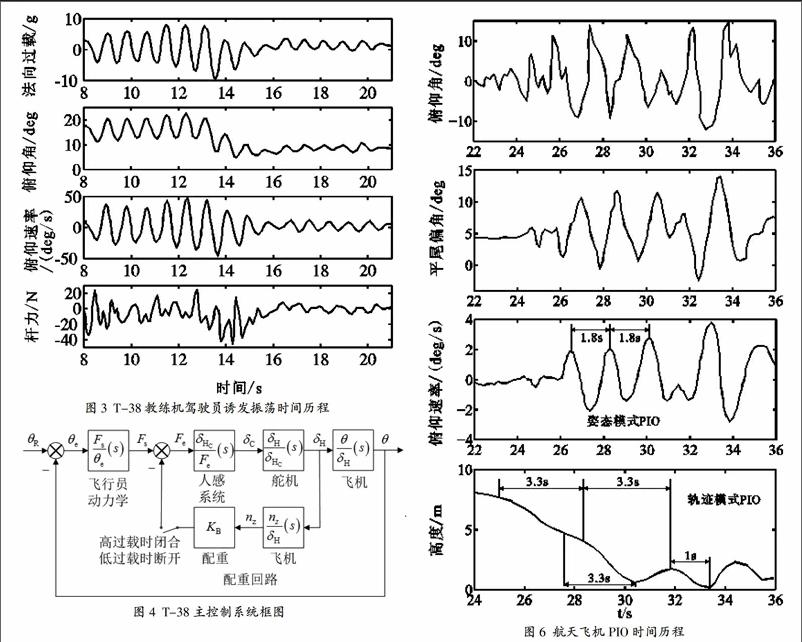
现代先进飞行控制系统通常具备多种控制模态,飞行员异常的大幅值操纵指令可能诱发飞机有效动力学构型的突然变化,而在有效飞机动力学构型的转换过程中,可能引发PIO问题。当前,尚未有合适的理论和数学模型阐述PIO与飞行控制模态转换之间的联系。美国的T-33教练机发生过一起典型的由飞行控制模态转换引发的PIO问题,其机载设备完整地记录下了当时的飞行数据,如图3所示。PIO发生初期,飞机纵向遇到高频低幅值振荡,飞行员尝试切断俯仰增稳并控制飞机。但在7.4rad/s的周期内飞机法向过载迅速变化,其差值到达了10个过载,PIO问题迅速发展。
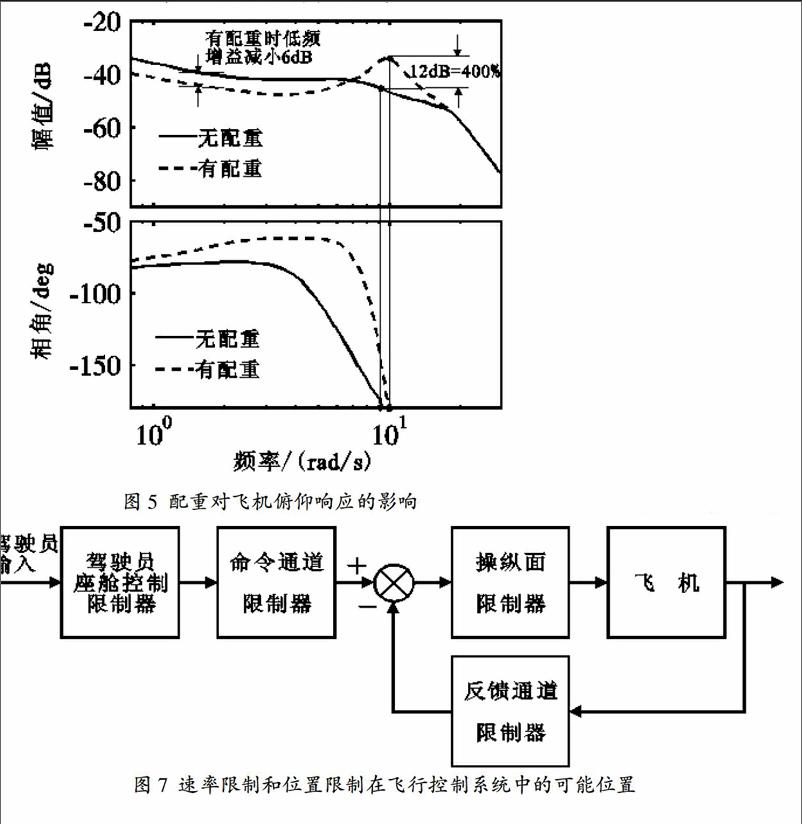
根据记载数据的事后地面仿真,诱发该PIO事件的主要原因是有效飞机动力学的转换和飞机员动力学特性的变化。俯仰增稳器的切断引发了第一次有效飞机动力学转换,其后又发生了两次转换。该飞机的飞控系统包含了人感系统和有效配重系统以获得合适的杆力梯度。配重系统不仅提供了合适的杆力梯度,也构造了一个机械反馈回路。驾驶员操纵飞控系统时必须面对包含驾驶员杆力梯度、配重、摩擦等的实际飞行动力学特性。图4给出了T-38教练机包含配重情况下的主控制系统。图5给出了配重系统是否连入回路两种情况下的俯仰杆力频域特性。根据图5分析,配重系统连通时,驾驶员能够大幅值操纵,未连通时其操纵幅值与系统摩擦力相当。配重降低了系统低频增益值,通过反馈降低了短周期阻尼比。由于这一改变导致中性稳定频率处的最大驾驶员增益变化异常,无配重反馈时的增益为有配重情况下的4倍,这一异常变化在有效动力学突变时,要求飞行员能够适应增益的剧烈非线性变化。
2.3 系统时间延迟与PIO的联系
时间延迟是驾驶员杆力输入到飞机开始响应之间的停滞时间。这种形式的时间延迟,根据测量方法的不同,常被称为“等效”或“有效”时间延迟。每种方法所测得的结果都是驾驶员感受到的停滞时间的一种近似。时间延迟是由各种原因造成的。大部分时间延迟是由于现代飞行控制系统的复杂性导致大量动态环节的串联,从而使飞机对驾驶员操纵的初始响应中引进了一种可觉察到的时间延迟。
具有小的时延是好的飞行品质的关键。多数飞行控制系统研制得到的经验是时延必须很小。当遇到高增益的操纵任务(如空中加油、瞄准、精确着陆等任务)时,稍大的时间延迟将会引起驾驶员的不良反应,并可能危及这些任务的完成。MIL-F-8785C规范给出了时间延迟的等级规定。对驾驶员作出的阶跃操纵力输入,飞机的响应不应呈现出超过下列数值的时间延迟:1级:≤0.1s;2级:≤0.2s;3级:≤0.25s。
“企业号”航天飞机在一次近进与着陆过程中,发生了典型的PIO事件,事件过程如图6所示。
这起PIO事件包含了两个纵向PIO过程(姿态过程和轨迹过程)。轨迹控制是该起PIO事件的主要因素。飞机有效延迟是PIO事件的关键因素,通过计算,信号经滤波器、高频飛机模态、舵机系统和数字系统产生的延迟的综合达到了0.27s,已经大于MIL-F-8785C规范中给出的3级飞行品质要求的延迟时间,过大的时间延迟导致了PIO发生。
2.4 非线性因素与PIO的联系
在整个电传飞行控制系统中常会发现速率限制环节和位置限制环节等非线性因素,如图7所示。前向通道中非线性限制环节与线性控制系统环节相串联,在反馈通道中也存在非线性限制环节。在经典案例里,驾驶员座舱控制限制(如驾驶杆)发生作用时,相对应的控制面限制(如升降舵)将同样发生作用。如此为的是确保飞机获得最大机动能力。
YF-22A在1992年4月25日低空复飞过程中发生严重PIO,导致飞行事故。该严重PIO事件便是由于速率限制饱和诱发的,事故数据记录如图8所示,Gibson相位速率准则评估结果如图9所示,带宽准则评估结果如图10所示。
3 结论
本文建立了飞机电传控制系统模型,通过构建的模型发现电传系统构成复杂,这就使得它与PIO的发生具有密切联系。电传控制中存在着多种可能触发PIO的因素,如人工感觉系统、控制模态转换、时间延迟、非线性等。通过研究上述因素与PIO间的联系,并进行案例剖析加深了对这种联系的认知。通过对电传控制系统与PIO联系的深刻理解,为改进控制系统设计来抑制PIO的发生奠定了坚实的理论基础。
参考文献
[1]McRuer, Duane T. Aviation Safety and Pilot Control, Understanding and Preventing Unfavorable Pilot-Vehicle Interactions[M]. WashingtonD.C.: NationalAcademy Press,1997.
[2]Duane T. Pilot-Induced Oscillations and Human Dynamic Behavior[R]. NASA Contractor Report 4683,1995.
[3]Liebst, Brad S. Nonlinear Pre-filter to Prevent Pilot-Induced OscillationsDue to Actuator Rate Limiting[J]. Journal of Guidance, Control,and Dynamics, 2002,25(4):740-747.
[4]高庆玉.歼教七飞机纵向驾驶员诱发振荡预测及其机理分析[D].北京:北京航空航天大学,1997.
[5]Mobarg, Milton, Lowell Lykken. JAS-39 Gripen Flight Control System Status Report[R]. Technical Report, SAAB Aircraft Division and Lear Astronics Corporation, 1991.
[6]徐浩军,陈廷楠,张登成,等.飞机飞行性能品质与控制[D].西安:空军工程学院,2004.
[7]朱建太.驾驶员诱发振荡及飞行安全评估[D].西安:空军工程学院,2002.
猜你喜欢
风湿病与关节炎(2022年4期)2022-07-22
交通科技与管理(2022年9期)2022-05-24
中学生报·教育教学研究(2022年1期)2022-04-18
科技创新导报(2021年31期)2021-05-10
中学生理科应试(2019年10期)2019-10-30
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
价值工程(2016年35期)2017-01-23