
穿梭式自动化立体仓库在梦牌瓷业的应用研究
2017-06-07 08:23:58徐汉均
物流技术与应用 2017年5期
杨 骁 徐汉均 蔡 靖 闻 琦 徐 健/文
穿梭式自动化立体仓库在梦牌瓷业的应用研究
杨 骁 徐汉均 蔡 靖 闻 琦 徐 健/文
本文介绍了一种新型的穿梭式自动化立体仓库的设计理念、信息系统架构、作业调度方式,提出了一套该类自动化立体仓库的解决方案。货物在高层密集货架区的存取任务是由两台巷道式对跑堆垛机的三维运动和自动穿梭板的水平运行来完成的,实现了立库高度自动化和高度空间利用率的使用效果。在常规立库调度方式的基础上设计了新的堆垛机和穿梭板协同作业的调度算法,优化了作业效率。最后,对库存量和出入库效率进行了核算。
穿梭板、对跑堆垛机、自动化立体仓库、仓储信息系统、作业调度算法
随着生产技术的增强和生产规模的扩大,企业对密集式仓库存储系统的需求也更加急迫。传统巷道式堆垛机解决方案,具有自动化程度高的优点,但是其单伸位甚至是双伸位的货叉结构不能充分利用仓储空间;穿梭板配合叉车的工作模式虽然具有空间利用率高的优点,但是难以建立合理的信息管理系统,不能实现全自动化作业。因此,穿梭式自动化立体仓库结合了上两类传统立库的优点,实现了高度自动化和高度的空间利用率;更重要的是,穿梭式自动化立体仓库的设计理念不仅需要满足用户的基本使用要求,还要兼顾作业效率和用户体验等多方面因素,需通过先进的信息系统架构和作业调度算法实现高效的自动化作业。
一、总体规划描述

穿梭式自动化立体仓库
图1是该仓库的平面布局图,主要包括南侧入库口、密集货架存储区、北侧出库口、货物周转区、抽检出库口和中央控制室等。
仓库的南北两侧均有单排货架和堆垛机运行的巷道,两巷道间是密集存储的主体区域,主体区域采用5层86列23排的货架排列结构,按照每列(通道)只能放入同一种货物的存储原则。货物的存取任务是通过两个巷道的单伸位对跑的堆垛机(共4台)和6台穿梭板来完成的,同时通过仓库管理系统(WMS)和仓库监控系统(WCS)对仓库的物流信息进行实时监控、调度和信息流的维护。
南侧入库口通过入库周转区与生产车间直接相连,货物码垛完毕后,需要将货物名称和数量与托盘信息绑定并上传至WMS,托盘信息是整个物流系统的信息载体。叉车将入库货物放在入库口的输送机上,准备入库。同时,南侧出库口也可以实现产品的先进后出、抽检、更改包装、出空托盘等出库作业功能,并且可以指定具体的出库站台。
北侧出库口通过出库周转区与装车平台直接相连,物流信息系统根据出库订单的要求,并按照指定日期、先进先出等原则自动分配出库作业,进行整托盘货物出库,并可拣选回库。
单排货架的主要功能是:当执行拣选回库、需要临时存放的某些特殊货物的入库作业时,或是执行随机抽检、盘库等作业时不可避免的需要生成搬库作业,单排货架上可以快速存放这几类作业的货物。
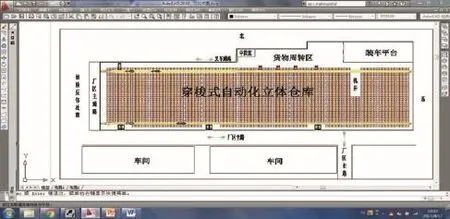
图1 :穿梭式自动化立体仓库的平面布局图
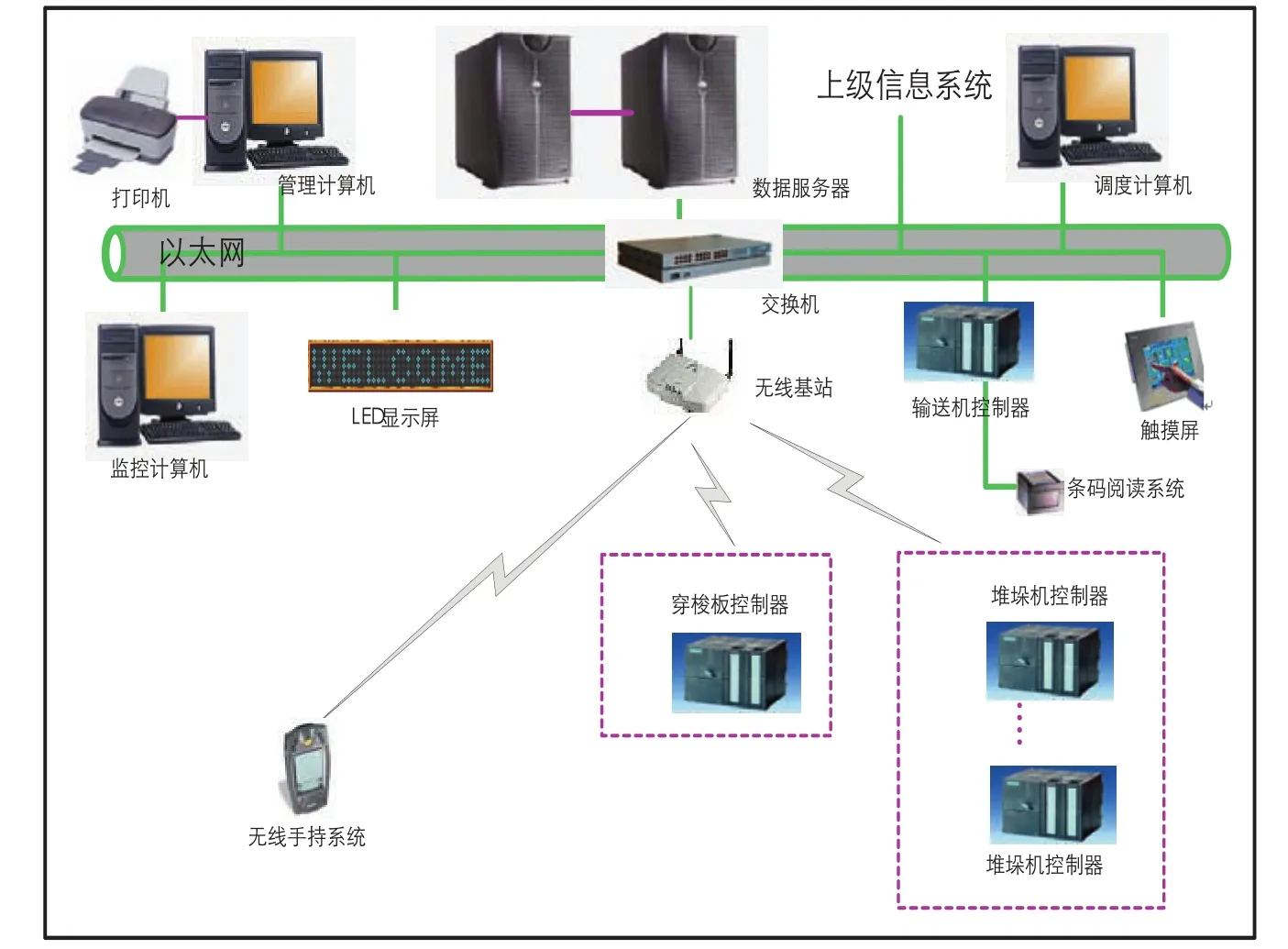
图2 :穿梭式自动化立体仓库信息系统的硬件架构

图3 :穿梭式自动化立体仓库信息系统的软件架构
二、穿梭式自动化立体仓库中自动化设备的特点
穿梭式自动化立体仓库物流系统的自动化设备包括堆垛机、穿梭板和出入库端站台。仓库的网络架构采用集成现场总线PROFIBUS、100/1000M高速以太网混合体系结构,堆垛机和穿梭板的控制系统的网络采用无线通信,上层管理级网络采用以太网方式。
1.巷道式堆垛机
堆垛机是仓库物流系统的基本设备和重要环节,它接收并执行WCS下发的作业任务。仓库采用南侧入库北侧出库的管理方式,因此,与以往单巷道的堆垛机自身存取货物的方式不同的是,执行入库、出库作业的分别是南北侧的不同堆垛机。考虑到货架与堆垛机垂直立柱等多方面机械误差因素,为了保证货物在载货台上不偏离中心位置,在水平采用BPS绝对认址的基础上,增加了“孔定位”技术,它可以对堆垛机水平停准列的列值进行修正。
当堆垛机搬运穿梭板和搬运货物时,垂直方向分别采用穿梭板认址和货物认址两种方式。
2.穿梭板
穿梭板在其专用轨道中沿轨道进行南北方向上的水平运行,配合升降动作可以进行存取货物的作业。定义北侧、南侧的作业基准面分别为A面、B面。穿梭板有两种工作模式,当处于叉车模式时,穿梭板将停在作业基准面的货架端头处,等待堆垛机前来搬运,实现作业通道的更换;当处于堆垛模式时,穿梭板将执行单存、单取、理货和盘点等托盘货物的作业任务,当作业执行完毕后,穿梭板会停留在工作基准面的第二个货位处等待新作业。
由于穿梭式自动化立体仓库网络架构的强大性,它能够解决在穿梭板配合叉车模式的立体库中,穿梭板不能自动充电的难题。当穿梭板电量低于一定阈值时,它将向WCS申请“请求充电”,WCS根据其作业状态和实时电量,判断是否让穿梭板继续执行完该通道的出库作业还是立即充电。这种调度方式可以使穿梭板在低于警戒电量之前仍然执行部分出库任务,保障了作业效率。
三、信息系统架构
1.信息系统的硬件架构
信息系统的硬件包括服务器、管理机、监控机、UPS电源、网络交换机、无线基站、无线手持终端、条形码阅读器、LED显示屏以及打印机等设备,如图2。服务器采用磁盘阵列存储和备份数据,保证立体仓库数据的安全性和可靠性。管理机对仓库运行参数和数据进行定义、管理和维护,它能有效地控制并跟踪仓库物流的全过程,并且具备与ERP、MES等系统的接口模块,实现全面的企业仓储信息管理。监控机从WMS、扫描终端、PLC和数据采集设备处接收信息,通过对物流设备进行的动态监测、控制与调度,执行仓储系统的作业任务。
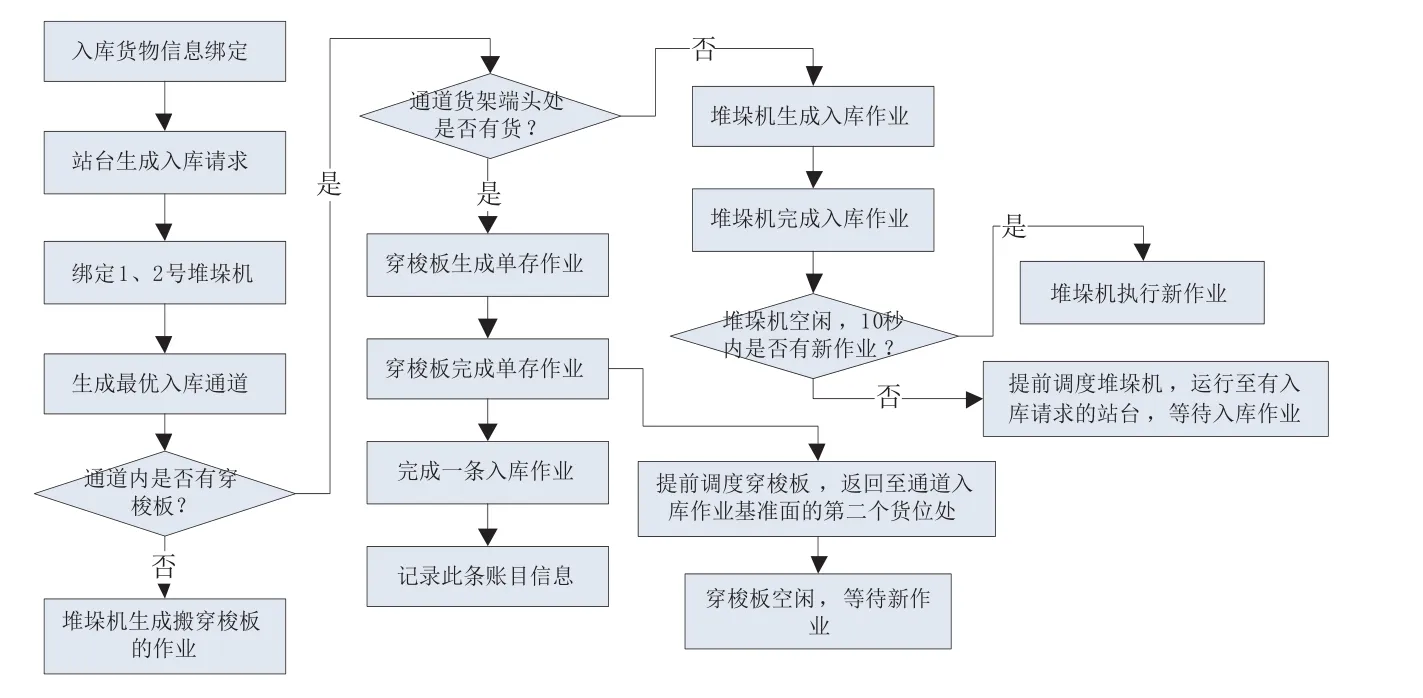
图4 :入库作业的调度流程图
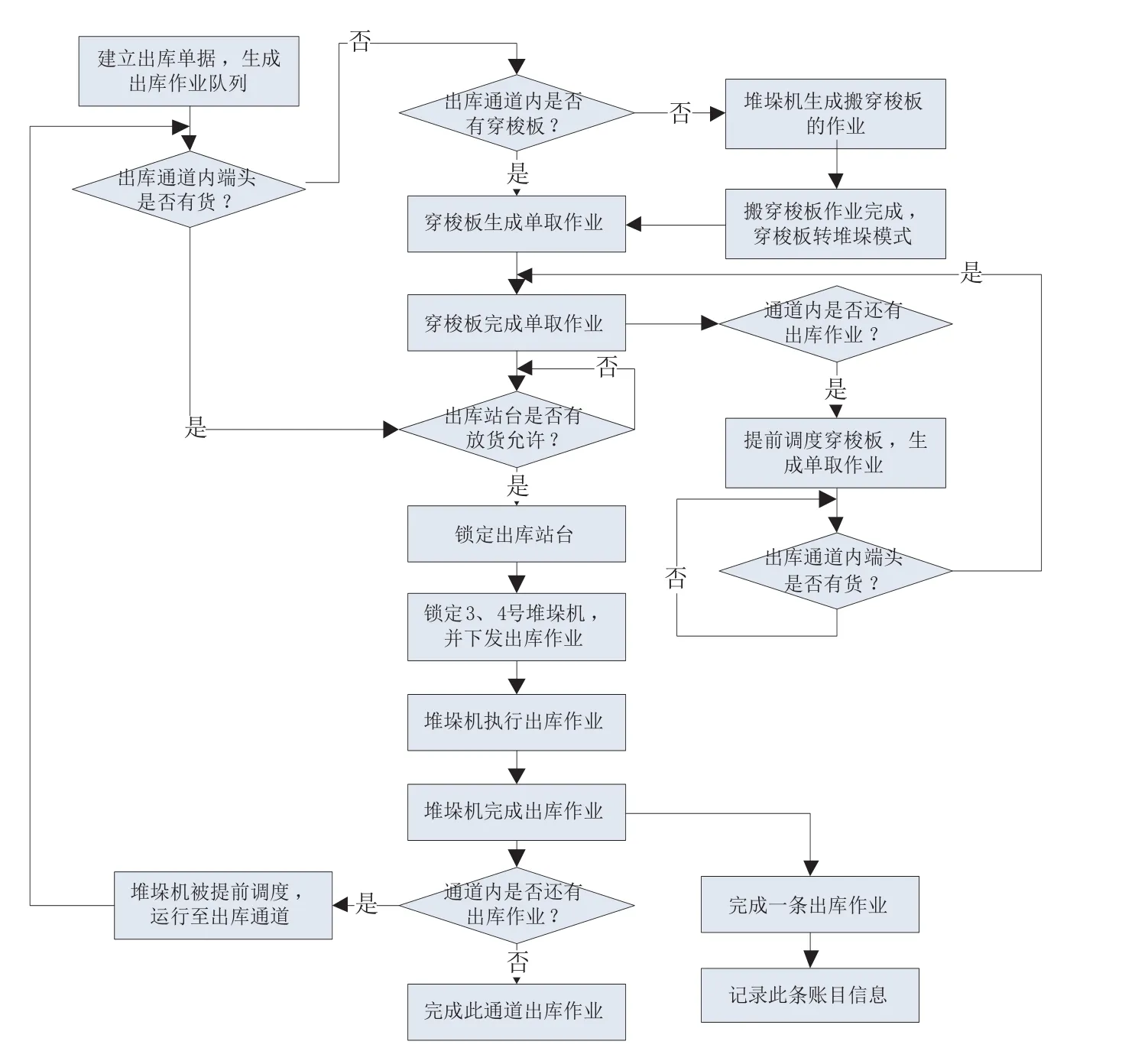
图5 :出库作业的调度流程图
2.信息系统的软件架构
信息系统的软件包括数据库软件、管理软件、调度软件和监控软件,它们用于参与信息系统软件架构的组建,如图3。仓库系统的软件架构分为五层:数据层以数据库为底层数据中心;自动控制层以各设备的PLC控制器为核心;应用软件层使用数据库管理系统作为数据库和上层管理系统及调度系统的中枢,监控组态软件实现对PLC控制器的状态采集与显示;事务处理层含有实现系统核心功能的多个重要模块,包括作业调度、通讯、接口、数据维护、台账处理等模块;用户界面层是可以直接操作的人机交互界面,并且对事物处理层和应用软件层进行操作与维护。
四、作业调度算法
入库和出库的调度算法是仓储物流调度系统中最为核心的两个环节。比常规立库复杂的是,该立库除堆垛机的作业调度之外,还要调度穿梭板,以及解决堆垛机与穿梭板的配合问题。调度算法需保证它们的作业互不干扰且步调协同一致,动作相对独立且无缝衔接,注重作业发送的时机和顺序,达到高效运转的作业效果。
1.入库作业调度(如图4)
绑定信息后的货物在入库站台生成入库请求,WCS根据已知的库存信息等条件分配最优的入库通道地址,继而给相应堆垛机下发入库作业,并且指定唯一的作业序列号。WCS根据该通道内是否有穿梭板而决定是否需要堆垛机首先执行搬穿梭板的作业,而后再执行货物入库至指定通道货架端头的作业任务。通道内的穿梭板执行单存作业,将货物存入指定的货位中,完成单存作业后,管理系统自动记录账目信息。至此,完成一条入库作业。
堆垛机在完成一条作业之后,有10秒的空闲等待时间,在这10秒之内,堆垛机可以接受新的作业;当10秒时,堆垛机被提前调度,运行至有入库请求的入库站台位置。
如何使南侧三个入库站台和两台对跑堆垛机能够协调配合,是提高入库效率的有效办法。每个入库站台有三种工作方式:1号堆垛机单独取货、2号堆垛机单独取货和随机分配堆垛机。入库时,按照存货地址的不同,1、2号堆垛机各负责半个仓库的区域。当在爆仓警戒线之前,选择堆垛机单独取货模式,实质上是将仓库分成了两个相对独立的库区,同一种货物最多存在两条未满货通道;当爆仓警戒线触发时,切换至随机分配堆垛机模式,同一种货物只能存在一条未满货通道。
2.出库作业调度(如图5)
库房管理员通过ERP所建立的单据,自动地在数据库中查找出符合要求的货物及其地址,并生成出库作业队列,指定唯一的作业序列号,堆垛机和穿梭板逐一执行作业队列中的出库任务。在出库通道货架端头处没货的情况下,WCS根据该通道内是否有穿梭板而决定是否需要堆垛机首先执行搬运穿梭板的作业。穿梭板执行单取作业,将货物送至该通道的货架端头处,完成单取作业。堆垛机执行出库作业,将货物出库至指定出库站台,管理系统自动销除账目信息并生成历史库存记录。至此,完成一条出库作业。
提高出库效率的核心在于根据出库作业队列和穿梭板、堆垛机当前的作业状态,对二者进行提前调度。当穿梭板完成单取作业后,如果下一条出库作业同样也在此通道中,那么穿梭板将立即去执行下一条作业,直至将货物送至此通道的货架端头处,设置单取作业完成。当堆垛机完成出库作业后,如果下一条出库作业同样也在此通道中,堆垛机提前运行至此通道在空闲状态下等待,待穿梭板完成单存作业后,堆垛机开始执行出库作业。
一般情况下,两台对跑堆垛机各负责半个库区的出库任务,3、4号堆垛机首先使用的出库站台顺序分别为至西至东和至东向西,这样可以有效地避免对跑时的避让干涉。两台堆垛机在完成各自半库区的出库任务之后,将按照列递增或递减的顺序,协助完成另一半库区的出库作业。
五、能力核算
1.库存量核算
穿梭式自动化立体仓库的平面长159.8米,宽33.9米,每层平面货位数为2150个(86列×25排),货位宽1.2米。库房内有四台堆垛机,两条巷道,每条宽1.6米,每台堆垛机的造价是穿梭板的三倍以上。
在相同的库房宽度时,若采用六台单巷道堆垛机的模式,至多只能容纳下20排货物,因此,穿梭式立库的库存量增加了25%。若采用六台单巷道双深位堆垛机(24排),库房宽度则需要增至约38.4米,此宽度的穿梭式立库,每列将能存30排货物,此时,库存量同样增加了25%。
2.穿梭式立库的出入库能力核算
堆垛机和穿梭板的水平运行速度分别为120米/分钟和60米/分钟。由于出库时对堆垛机和穿梭板进行了提前调度,因此每条作业的时间总是由作业时间长的一方所决定。
经实践测算,穿梭板在一个通道内单取作业的时间中位值为74秒,最短、最长时间为42秒和158秒;以3号堆垛机将位于21列的货物出库至43列的出库站台为例(库房长度的1/4),堆垛机往返平均所需要的作业时间为72秒(单程水平运行24秒,货叉存、取货过程各需要12秒)。因此,这一个通道中23排货物,前11排货物的作业时间由堆垛机所决定,后12排的作业时间由穿梭板所决定,总作业时间约为1943秒,每盘作业时间约为85秒。因此,两台堆垛机同时出库的作业效率约为84.7盘/小时。
根据分配出库货位的原则可知,两台堆垛机的工作状态存在三种情况:一台单独工作、一台帮助另一台出库、两台独立工作,三种出库情况每小时出库量为43.4盘、65.1盘、84.7盘。根据实际情况可知,三种情况出现的概率分别为0.2、0.1和0.7,因此两台出库堆垛机的平均总作业效率为74.5盘/小时。
同理,入库时也对堆垛机和穿梭板进行了提前调度,每条作业的时间也总是由作业时间长的一方所决定,因此,入库作业时间是出库作业时间的逆过程。在爆仓警戒线之前,独立工作的两台入库堆垛机总作业效率约为84.7盘/小时。当爆仓警戒线触发后,协同工作的两台入库堆垛机的总作业效率约为65.1盘/小时。
作者单位为北京机械工业自动化研究所
猜你喜欢
物流技术与应用(2021年11期)2021-12-27 05:17:20
现代信息科技(2021年21期)2021-05-07 02:54:12
制造业自动化(2018年10期)2018-11-02 09:51:40
酒·饮料技术装备(2018年1期)2018-04-28 09:09:07
物流技术与应用(2017年12期)2018-01-31 02:08:05
中国粮食经济(2018年9期)2018-01-23 03:02:15
产品可靠性报告(2017年7期)2017-09-05 09:49:11
制造业自动化(2017年2期)2017-03-20 14:26:07
电子工业专用设备(2015年4期)2015-05-26 09:10:37
制造业自动化(2014年19期)2014-12-18 08:03:58
