无人机遥感系统在风暴潮灾害损失评估中的应用初探
2017-06-06 14:09:21孙玉超曾纪胜杨帆王银霞魏征
海洋开发与管理 2017年4期
孙玉超,曾纪胜,杨帆,王银霞,魏征
(国家海洋局南海规划与环境研究院 广州 510300)
无人机遥感系统在风暴潮灾害损失评估中的应用初探
孙玉超,曾纪胜,杨帆,王银霞,魏征
(国家海洋局南海规划与环境研究院 广州 510300)
无人机遥感系统由于具有响应迅速、起降方便、可低空作业、分辨率高等优点,在自然灾害调查及应急救援中有广泛的应用。文章在台风“苏力”登陆后,利用无人机遥感系统及时获取台风登陆点附近25 km2范围的高分辨遥感影像,通过对遥感影像进行分析处理,提取研究区域典型风暴潮承灾体的灾害损失信息并对其进行统计分析,为风暴潮灾害损失评估提供数据支持;对无人机低空遥感系统在风暴潮灾害调查及灾害损失评估中的应用作初步探索。结果表明,无人机低空遥感系统在风暴潮灾害调查中的应用具有一定的可行性且取得一定成果,但受制约的方面也较多,今后还需结合风暴潮灾害特点作进一步的应用探索。
无人机;遥感;风暴潮;台风灾害;灾害损失评估
风暴潮是由于剧烈的大气扰动,如强风和气压骤变(通常指台风和温带气旋等灾害性天气系统)导致海水异常升降,使受其影响的海区潮位大大地超过平常潮位的现象[1]。登陆我国的台风和温带风暴潮往往会造成风暴潮灾害[2],风暴潮灾害会导致海水漫堤,造成海水倒灌,鱼塘、油井、工厂等被淹,对沿海城市基础设施和人民生命财产安全造成巨大损失[3]。2013年第7号超强台风“苏力”于7月8日8时在西北太平洋上生成,13日3时在我国台湾登陆,登陆时中心附近最大风力达14级;13日16时在福建省连江县黄岐半岛登陆,登陆时中心附近最大风力为12级[4]。台风“苏力”过境引起的风暴潮给我国台湾和大陆沿海的水产养殖、渔业设施、居民生命财产安全等造成严重影响[5]。本研究采用无人机遥感系统获取台风“苏力”登陆后登陆点附近受灾严重区域的高分辨率遥感影像,以遥感影像为底图,利用GIS技术提取影像中各类承灾体受损信息,并对承灾体受损情况进行分类统计,为灾害损失评估提供数据支持,从而探索无人机遥感技术在风暴潮灾害调查及灾害损失评估中的应用。
1 无人机低空遥感系统的组成
无人机系统主要由飞行器、飞行控制系统、稳定云台、任务传感器、无线通信系统、数据处理与应用分析系统以及地面控制系统等几部分组成[6]。其以无人机为飞行平台,以高分辨率数码相机为传感器,按照设定飞行航线和拍摄间隔,获取测量区域高分辨率数字影像,获取的影像经一系列数据生产流程后最终可生成数字正射影像(DOM),可满足不同的应用需求。
本研究采用的无人机系统是北京天下图公司LT-150中型固定翼无人机(图1)。该无人机长2.2 m,翼展2.5 m,巡航速度为110 km/h,采用汽油发动机,续航时间约3 h;搭载传感器为Canon 5D Mark II单反相机,经Version2.2 检校(像幅为5 616像素×3 744像素,像素大小为6.41 μm)(表1)。

图1 LT-150型无人机系统

序号检校内容检校值1主点x02832.57122主点y01860.92103焦距f5541.35744径向畸变系数k10.0000000029163326565径向畸变系数k2-0.0000000000000001246偏心畸变系数p10.0000000069762555627偏心畸变系数p20.0000001471022761078CCD非正方形比例系数α-0.0003146790279CCD非正交性畸变系数β0.000048002602
注:坐标原点在影像左下角。
2 灾害损失区域高分辨率影像获取
2.1 研究区域选取及航线设计
根据台风“苏力”登陆的情况,本研究选取登陆点附近的连江县可门港附近区域作为航拍区域,该区域涵盖填海区、临港工业区、居住区、渔港、渔排养殖、吊养、围塘养殖等多种风暴潮承灾体类型(图2)。为保证航拍区域承灾体灾害损失情况清晰易读,本次航拍地面分辨率应优于0.1 m,因此设定飞行航高为600 m,设定航向重叠为75%、旁向重叠为60%。

图2 研究区域无人机航拍航线设计
2.2 飞行数据获取
台风“苏力”在福建省连江县登陆时间为7月13日,台风过境后多伴有雷雨天气且风力较大,天气环境不利于无人机作业。经过1 d的等待,无人机飞行组于7月15日上午对研究区域进行1个架次的航拍作业,飞行时间约1 h,共飞行14条航带,获取航拍影像935张,飞行覆盖面积约25 km2(表2)。
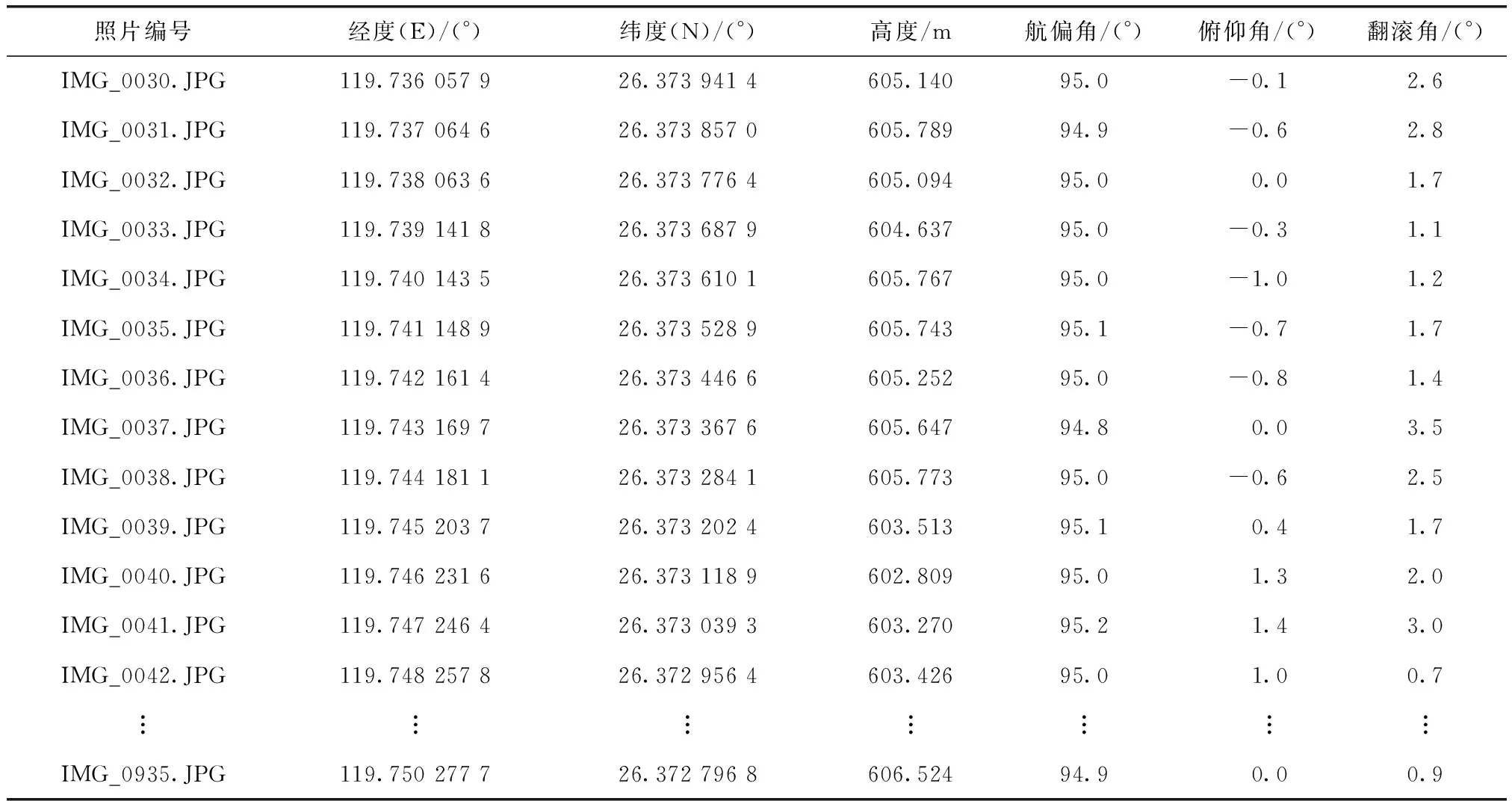
表2 无人机遥感系统获取的研究区域POS数据(部分)
2.3 飞行数据检查
无人机飞行数据获取后首先要对其进行质量检查,即检查是否满足影像拼接要求,包括POS数据检查和飞行影像检查[7]。POS数据检查时,不满足影像倾角、航高差以及重叠度要求的数据需删除,航带拐弯处拍摄的数据也应删除。飞行影像检查时,由于此次航拍的影像数据包括部分海上范围,像主点落水的影像需剔除;由于天气原因,部分区域云层较低,飞行影像受云层影响较严重,这部分影像也需剔除。经质量检查,满足拼接要求的影像还有786张。
3 影像数据处理及正射影像生成
影像数据处理主要包括畸变校正、空三加密、数字高程模型(DEM)和数字正射影像(DOM)生产4部分,最后进行产品质量检查[8]。本次数据处理采用中国测绘科学研究院的Pixel Grid软件,详细数据处理流程如图3所示。

图3 Pixel Grid软件DOM数据生产流程
影像数据经过以上数据处理流程并加入地面实测像控点数据后,生成的正射影像如图4所示。
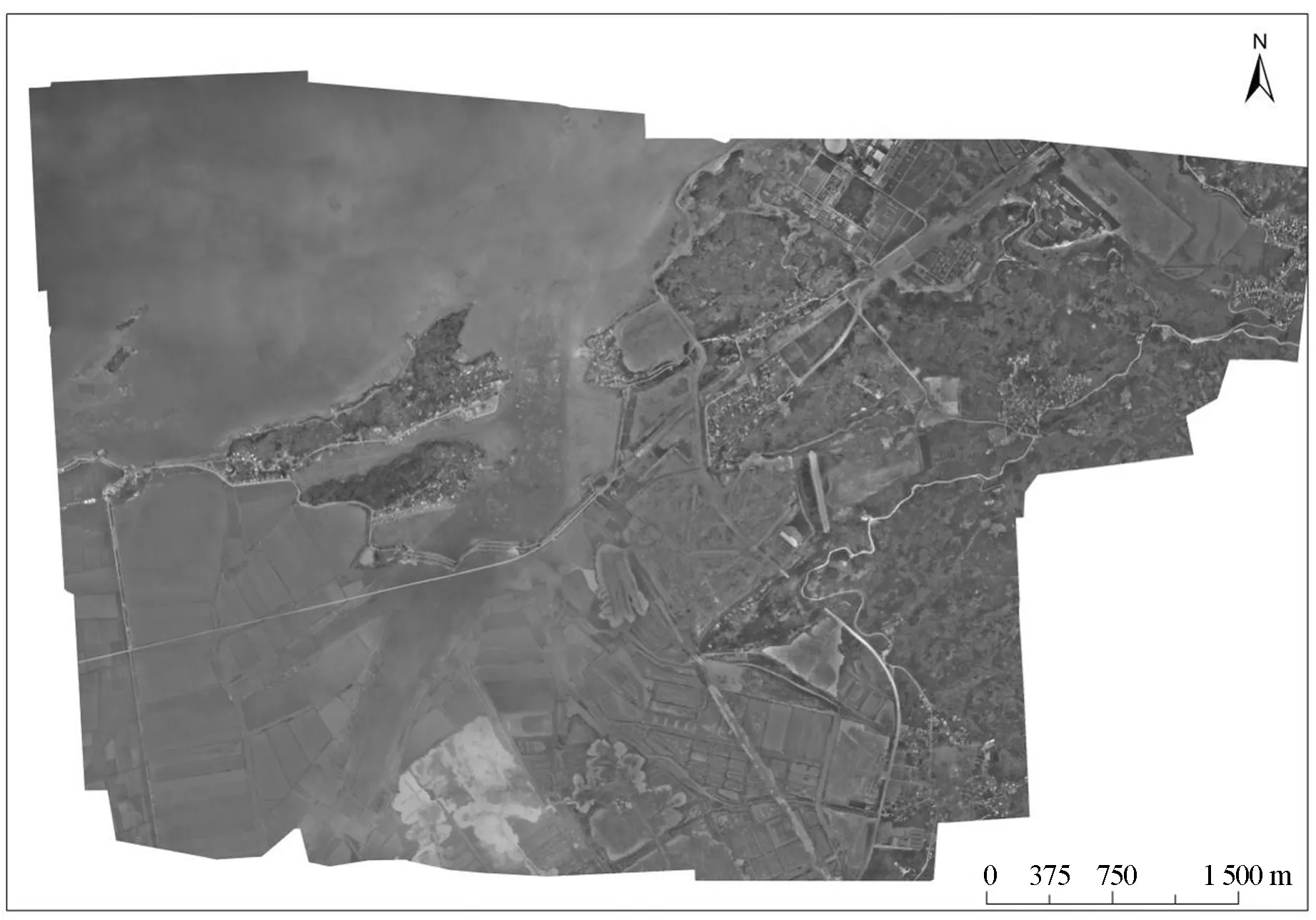
图4 影像处理后生成的航拍区域数字正射影像(DOM)
4 承灾体受损信息提取及统计分析
航拍覆盖区域主要包含填海区、临港工业区、居住区、渔港、渔排养殖、吊养、围塘养殖等多种风暴潮承灾体类型。数据处理后生成的正射影像分辨率为0.1 m,可以较清晰地判别承灾体的分布及灾害损失情况(图5)。

图5 影像上研究区域几类承灾体受损情况
通过研究区域影像分析可以发现,陆域部分承灾体受损情况不明显,渔船由于停靠在避风的渔港里,受损情况也不明显,受影响最严重的是渔排养殖和海上吊养。渔排养殖和海上吊养本身抗灾性相对较弱,而且承受风浪侵袭强度比陆域承灾体大,因此灾害损失情况在影像上表现较为明显。海上吊养的水上浮子部分受风暴潮影响后,其移位情况可以从影像上判断,但其吊养的主体部分在水面以下,无法单独从影像上判断其损失情况,因此不作研究分析。本研究主要通过提取研究区域海上渔排养殖灾害损失信息,统计受损渔排个数、受损面积以及受损面积比例,为灾害损失评估提供数据支持(图6)。

图6 根据无人机影像提取的渔排受损情况 注:受损渔排为渔排有变形但结构完整, 严重受损渔排为渔排结构已被毁坏。
对影像中提取的渔排受损信息进行统计,获得渔排养殖受损数量、受损面积和受损面积比例(表3)。
表3 渔排养殖受损数量、面积及比例

类型数量/个面积/m2占总面积比例/%正常渔排14216711297.22受损渔排725581.49严重受损822211.29所有渔排157171891100
以上统计结果对风暴潮灾害损失情况的快速初步统计提供重要的数据参考,但具体灾害损失情况还需结合现场调查及对比本底数据予以确定。
5 无人机遥感在风暴潮灾害调查中的可行性分析
本研究在台风“苏力”登陆后利用无人机遥感系统快速响应,及时获取受灾严重区域的高分辨率遥感影像,验证无人机遥感系统在风暴潮灾害调查中的可行性,但在工作中也发现几方面问题。 (1)台风过境伴随的大风及雨水天气给无人机影像数据获取造成很大不便,而基于无人机遥感影像的风暴潮灾害信息获取往往需及时有效地获取数据,无人机遥感数据的获取存在一定的困难。(2)研究区域的选取既要有利于无人机飞行作业,又要包含多种典型风暴潮承灾体类型,还要是受灾较为严重区域,从而保证获取比较典型的受灾影像数据;而台风登陆前登陆点位置往往存在不确定性,因此,研究区域的选取存在较大难度。(3)基于无人机遥感影像的灾害损失信息提取结果存在不确定性,部分灾害损失情况还需进行现场确认;此外,无人机遥感影像覆盖范围有限,无法对受灾区域开展全覆盖调查,只能作为风暴潮灾害调查的补充手段。
6 结论
无人机遥感系统作为卫星遥感和有人机航空遥感的补充手段,具有实时性强、起降方便、分辨率高、可低空作业的优点,且能够在高危地区作业,在自然灾害应急救援中有广泛的应用[9]。本研究结合台风“苏力”登陆后无人机遥感应用实例,探索无人机遥感系统在风暴潮灾害调查及灾害损失评估中应用的可行性,也为基于无人机遥感影像的灾害损失信息提取提供参考。结果表明,无人机遥感系统在风暴潮灾害调查及灾害损失评估中具有一定的实用性,且取得初步应用成果,但受制约的方面也较多,今后还需结合风暴潮灾害特点作进一步的应用探索。
[1] 孙湘平.中国近海区域海洋[M].北京:海洋出版社,2008:157-158.
[2] 石先武,谭骏,国志兴,等.风暴潮灾害风险评估研究综述[J].地球科学进展,2013(8):866-872.
[3] 王国栋,康建成,闫国东.沿海城市风暴潮灾害风险评估研究述评[J].灾害学,2010,25(3):114-118.
[4] 杨林,曹春荣,林秋,等.台风“苏力”灾害风险与防御行为效益评估[J].气象与环境学报,2015,31(1):106-111.
[5] 郑崇伟,周林,宋帅,等.1307号台风“苏力”台风浪数值模拟[J].厦门大学学报(自然科学版),2014,53(2):257-262.
[6] 王芳,宋士林,葛清忠.无人机在海洋调查中的应用前景展望[J].海洋开发与管理,2013,30(2):44-45.
[7] 国家测绘局.低空数字航空摄影规范:CH/Z 3005-2010[S].2010:5-6.
[8] 国家测绘局.低空数字航空摄影测量内业规范:C H/Z 3003-2010[S].2010:7-8.
[9] 李珊珊,苑文颖,宫辉力,等.无人机遥感系统在灾害损失实物量评估中的应用[J].测绘科学,2013,38(6):76-80.
Preliminary Application of UAV Remote Sensing System in Storm Surge Disaster Loss Assessment
SUN Yuchao,ZENG Jisheng,YANG Fan,WANG Yinxia,WEI Zheng
(South China Sea Institute of Planning and Environmental Reaserch,SOA,Guangzhou 510300,China)
UAV remote sensing system has the advantages of rapid response,easy takeoff and landing,low operation,high resolution,and has been widely used in natural disaster investigation and emergency rescue.After the typhoon “Su Li” landed,UAV remote sensing system was used to obtain high resolution remote sensing images in the range of 25 km2near the typhoon landing point in time.The disaster loss information of typical storm surge disaster bearing body in the study area was extracted and analyzed statistically,which provided data support for storm surge disaster assessment,through the analysis and processing of remote sensing images.The preliminary application of low altitude UAV remote sensing system in storm surge disaster investigation and disaster loss assessment was explored.The results showed that the application of low altitude UAV remote sensing system in the storm surge disaster investigation has certain feasibility and could achieve certain results,while with a lot of constraints.Further application and exploration are needed to be performed combining with the characteristics of storm surge disaster.
UAV,Remote sensing,Storm surge,Typhoon disaster,Disaster loss assessment
2016-08-20;
2017-03-05
国家海洋局南海分局海洋科学技术局长基金项目(1506);海洋公益性行业科研专项经费项目(201305020-7);国家自然科学基金项目(61527810).
孙玉超,工程师,硕士,研究方向为海洋测绘、无人机低空遥感及GIS开发,电子信箱:503598481@qq.com
魏征,工程师,博士,研究方向为海岸带遥感、无人机/航摄仪摄影测量,电子信箱:weizheng0628@foxmail.com
P7
A
1005-9857(2017)04-0056-05
猜你喜欢
广东海洋大学学报(2022年5期)2022-09-28 01:40:30
海洋通报(2021年2期)2021-07-22 07:55:24
中外文摘(2021年10期)2021-05-31 12:10:40
城市与减灾(2021年2期)2021-04-17 02:04:18
科学(2020年4期)2020-11-26 08:27:00
海洋通报(2020年6期)2020-03-19 02:10:18
小学生优秀作文(低年级)(2018年6期)2018-05-19 01:54:27
作文通讯·高中版(2017年6期)2017-07-10 03:21:34
陕西画报(2017年1期)2017-02-11 05:49:48
水土保持通报(2014年5期)2014-06-09 08:27:30