基于星联网的深空自主导航方案设计
2017-06-05 15:10:04郑伟张璐王奕迪
深空探测学报 2017年1期
郑伟,张璐,王奕迪
(国防科学技术大学 航天科学与工程学院,长沙 410073)
基于星联网的深空自主导航方案设计
郑伟,张璐,王奕迪
(国防科学技术大学 航天科学与工程学院,长沙 410073)
为了降低地面测控系统的负担、提高深空探测器的导航效率,提出了基于星联网的航天器自主导航概念,对星联网的应用体系进行了设计。借助脉冲星、星间链路等手段实现星联网系统中基准航天器完全自主的高精度导航,用户航天器通过与基准航天器或其他用户航天器的交互通信与测量就可以实现自身状态估计。以地月转移任务为例,设计了星联网系统在地月空间的具体应用方案,分析了地月空间基准航天器的配置与自主导航方法,阐述了用户航天器的单层与多层导航策略。对基于脉冲星与星间链路观测的基准航天器自主导航进行了仿真,验证了观测基准航天器或者其他用户航天器时,地月转移段航天器自主导航的可行性。结果表明:基准航天器可以达到20 m的定位精度,用户航天器可以达到优于30 m的定位精度。基于星联网的航天器自主导航是可行的,发展星联网可以为我国构建天基自主基准导航系统提供有力支持。
星联网;自主导航;脉冲星;地月转移任务
0 引 言
导航定位是深空探测任务中的关键技术之一。当前,航天器的导航信息大多通过地面测控系统提供[1]。然而,较大的通信延迟使深空航天器无法实时获得导航信息[2];在轨航天器的日益增多也极大增加了地面测控系统的负担。为了降低运营成本,提高航天器的自主性与生存能力,设计深空自主导航系统十分必要。
空间技术水平的提高使在轨运行的深空探测器越来越多,它们之间形成了一个庞大的行星际通信网络。本文提出了星联网的概念,建立了一种基于星联网来实现深空探测器自主导航的方法;同时对星联网的导航应用体系进行了方案设计。针对地月空间,详细说明了星联网中航天器的应用与导航策略,并对星联网支持下的月球探测任务进行了仿真与验证。
1 星联网概念的提出
针对基于地面测控站进行导航时存在的通信时延长、导航反应慢、运营成本高等问题,发展深空自主导航是航天技术发展的必然趋势。目前,国内外学者在星间链路、天文导航、X射线脉冲星导航等方面进行了大量研究,为实现深空航天器的自主导航提供了可行的思路。
2011年,NASA提出了发展下一代空间互联网络体系结构(Inter Planetary Network,IPN),用于进行深空探测的通信数据传输[3-4]。2015年,NASA提出多航天器定位系统(Multi-Autonomous Positioning System,MAPS)[5-6],在已有火星勘察轨道飞行器(Mars Reconnaissance Orbiter)与“奥德赛”火星探测器(Mars Odyssey spacecraft)的基础上,结合地基测控系统,初步形成火星导航网络,这个网络将与未来的商用火星通信轨道飞行器结合,预期通过不断增长的通信带宽以及转播信息,实现多航天器之间的交互通信与导航信息更新。NASA提出的多航天器定位系统为实现深空航天器自主导航提供了一个初始框架,但是多航天器定位系统仍然依赖于地面深空网(Deep Space Network,DSN)的支持,不能实现完全自主的导航。
在分析深空航天器自主导航方法与NASA相关方案的基础上,本文提出了星联网的概念。所谓星联网,就是由近地和深空航天器构成的自组织网络,借助于脉冲星、星光等手段提供完全自主的高精度导航基准,通过航天器之间的交互通信与测量实现网络内所有航天器的状态估计。随着在轨航天器的日益增加,最终形成一个从近地到深空、完备的天基自主导航系统。
2 星联网应用体系设计
星联网的核心是使网络中的航天器追踪到彼此,在彼此通信的过程中接收导航信息,从而实现状态估计。星联网中的航天器可以分为基准航天器和用户航天器两部分。其中基准航天器通过观测脉冲星等实现自主导航,为整个网络提供导航基准;用户航天器上安置与星联网兼容的星间测距设备,通过与基准航天器及其他用户航天器的相互通信实现对自身位置的确定。
与导航星座不同,星联网的网络构型和成员航天器灵活可变,任何配置与网络兼容星间链路测量设备的航天器均可加入网络。网络中的任一航天器均可为其他航天器提供导航服务。
图1给出了由6个航天器所构成网络及用户航天器获得导航信息方式的示意图。航天器A、B、C为基准航天器,它们为星联网系统提供导航基准。航天器D、E、F为用户航天器,它们具有各自独立的探测任务,同时在星联网中可以接收并播发相关的导航信息。用户航天器可以根据其观测模式的不同再次进行划分,例如,航天器D、E通过直接与基准航天器A、B、C通信获得相应的导航信息,这类用户航天器可以划分为第一层;F可以认为是第二层用户航天器,它不与基准航天器进行通信,只通过与其他用户航天器之间的星间通信获得相应的导航信息,实现自身位置的确定。
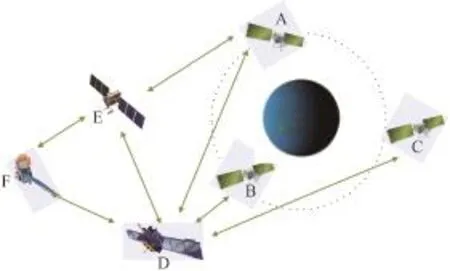
图1 简化的星联网示意图Fig.1 Illustration of the simplified spacecraft networking
随着深空探测任务的增加,新的航天器不断加入星联网,在执行自身探测任务的同时,也可以作为星联网中的新增导航节点。因此,星联网是可升级的,完全自主,适用性广。图2给出了太阳系范围内星联网体系概念图。随着太阳系内基准航天器与用户航天器的增加,星联网可以不断升级与扩展,最终形成一个高可靠、高效率、低成本的自主导航系统。
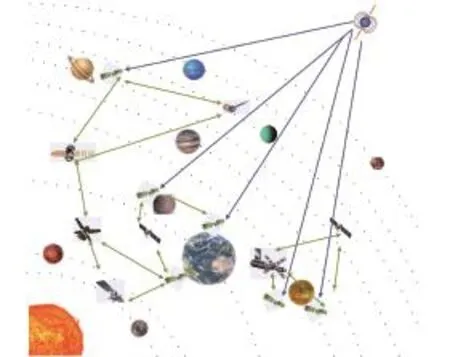
图2 星联网体系概念图Fig.2 Concept map of the spacecraft networking system
3 星联网应用方案设计
作为距离地球最近的天体,月球是人类深空探测的起点,也是进行下一步深空探测的前哨站[7]。覆盖地月空间的星联网系统,可以使月球探测器获得丰富的导航信息源,并满足实时性与低成本的要求。下面将给出地月空间星联网系统的具体设计方案。
3.1 基准航天器配置方案与导航策略
3.1.1 基准航天器空间配置
月球探测任务具有不同的需求,例如地月转移轨道与月球环绕轨道的定轨测轨需求、月球探测车的通信导航需求。基准航天器要对地月空间形成较全面的覆盖,才能实现对不同月球探测任务的支持。
位于月球轨道的基准航天器可以为绕飞、进入、下降与着陆段的航天器提供高精度的导航信息。位于地球高轨与地月平动点轨道的基准航天器则可以为地球出发段与地月转移轨道提供位置服务。图3给出了地月空间的基准航天器配置示意图。
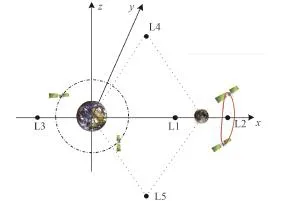
图3 基准航天器配置方案Fig.3 Configuration scheme of the basis spacecraft
3.1.2 基准航天器导航策略
对于星联网系统来说,基准航天器是整个自主导航系统的基准,其自身的定位精度会直接影响用户航天器的测量精度,因此,实现基准航天器的高精度自主导航是保证星联网系统定位准确性的基础。
脉冲星的自转周期具有长期稳定性,可以作为宇宙中天然的导航信标与时钟[8]。与卫星导航相比,脉冲星导航不受空间限制与人为干扰;相比于天文导航,脉冲星导航可以同时进行航天器的位置、姿态与时间确定。综合比较各种导航方式,采用脉冲星为星联网中的基准航天器提供导航,是一种有效可靠的方式[9]。
X射线脉冲星导航的基本原理可以描述为:脉冲星辐射的光子被深空探测器上安装的X射线探测器接收,探测器接收并且记录光子到达探测器的时间,通过时间相位模型,将脉冲到达航天器的时间与到达太阳系质心SSB的时间进行比较,可以反映航天器相对于SSB的距离。通过观测不同的脉冲星,就可以建立起航天器在三维空间下的几何约束,从而解算出航天器的位置[10]。
脉冲到达航天器时间与脉冲到达SSB时间的转换方程为
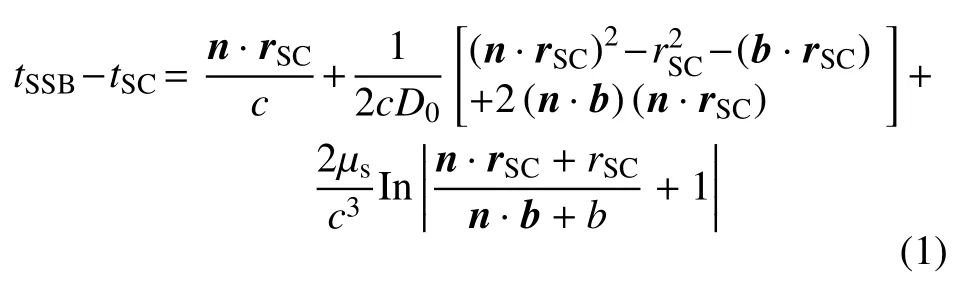
其中:等号右边的第一项是一阶的多普勒延迟;第二项是X射线平行到达太阳系引起的时间延迟;第三项为夏皮罗延迟效应;tSC是脉冲信号到达航天器的时间;n是脉冲星位置矢量;rSC是航天器相对于SSB的位置矢量;c是光速;D0是脉冲星在基准传播时间T0时的位置;b是SSB相对于太阳质心的位置矢量;μs为太阳引力常数。
对于两颗基准航天器来说,可以采用基于脉冲星差分观测的方法来进行基准航天器的定位。两颗基准航天器接收同一脉冲信号,接收脉冲信号的时间差(TDOA)反映了两颗航天器在脉冲星方向的投影距离,利用两航天器的相对位置与脉冲星之间的位置关系就可以构建观测量[11-12]。
图4所示为基于差分观测的脉冲星导航原理,航天器A、B是两颗基准航天器,它们搭载了脉冲星探测器接收脉冲星辐射的X射线光子。
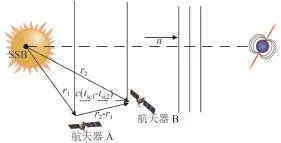
图4 基于差分观测的脉冲星导航原理Fig.4 Principle of X-ray pulsar navigation based on TOA difference
由式(1)可知,脉冲到达航天器的时间转换到SSB的绝对测量模型可以分别表示为
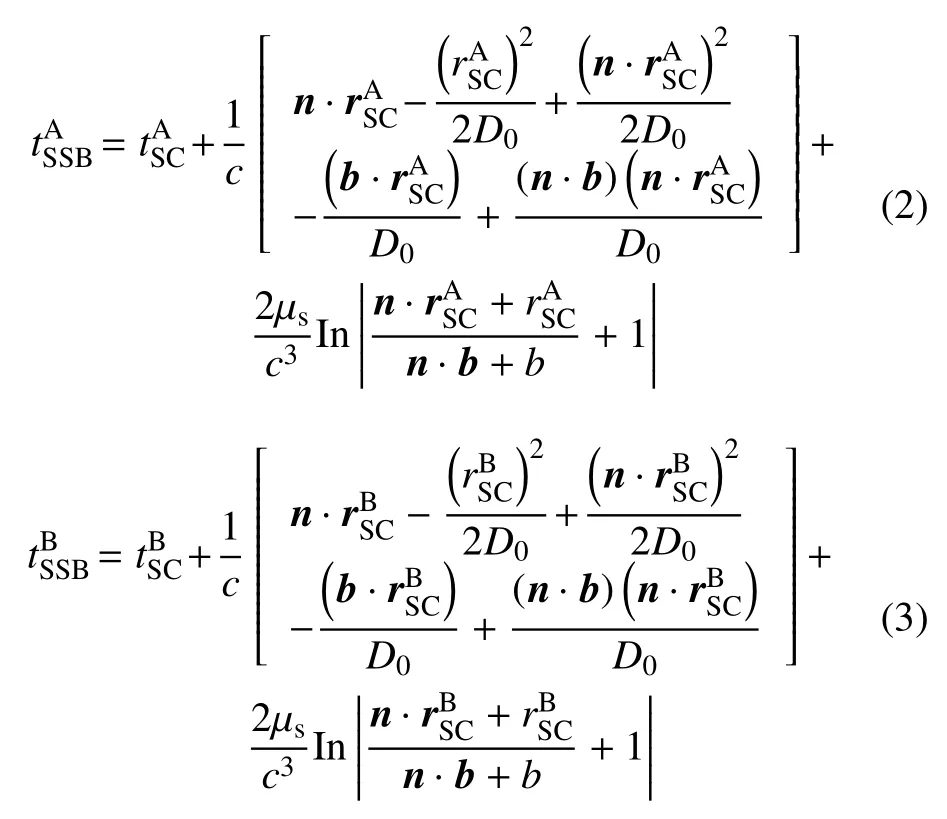
(2)、(3)两式相减,可得脉冲星到达两航天器相对观测模型的一阶简化表达式

其中:δtAB为两颗航天器接收脉冲信号的时延。由式(4)看出,在基于相对观测的脉冲星导航中,脉冲星星表误差、航天器钟差等因素在差分过程中大大消除,与基于脉冲星的绝对定位相比,导航精度大为提高[13]。
3.2 用户航天器导航策略
基准航天器实现自身的状态估计后,可以为用户航天器提供导航服务。用户航天器只要搭载星间链路测量设备,就可以直接与基准航天器相互通信,获得相应的导航信息。
图5为月球探测任务的导航方案示意图,A、B、C为位于地球高轨的基准航天器,D、E为地月L2平动点Halo轨道的基准航天器,F、G为其他用户航天器,H为月球探测器。其中,F、G可以认为是地月系统星联网的第二层航天器,它们通过与基准航天器通信实现导航后,可以将自己的状态播发给其他的用户航天器。

图5 用户航天器导航方案Fig.5 The navigation scheme of customer spacecraft
在到达月球的过程中,月球探测器H可以根据所处轨道的不同阶段,与不同的基准航天器进行通信。例如,月球探测器在地球出发段时可以与地球高轨的基准航天器A、B、C通信。在地月转移段时,可以根据自身需求,选择相应的航天器通信,既可以与地球高轨的基准航天器A、B、C通信,也可以与其他的高轨用户航天器F、G通信,或者与位于地月L2平动点Halo轨道的基准航天器D、E通信,通过星间链路观测获得相应的导航信息,实现自身状态的估计。
根据基于星间链路观测的原理,以第n层的航天器H观测第m层的航天器A为例,相应的观测方程可以记为

值得一提的是,用户航天器实现自身轨道位置确定后,通过广播或者指向的方式向将自身的位置播发给其他的航天器后,随着未来各种航天任务的增加,星联网系统将不断复杂与完善[14]。后续的航天器可以根据自身的需求进行链路规划,以距离最近、通信时间最短或观测信息最多作为标准,选择与基准航天器或者其他用户航天器通信,获得最优的观测量,实现自身位置的确定。
4 仿真与分析
本节以地月空间的星联网系统为例,对基于脉冲星与星间链路观测的基准航天器自主导航进行了仿真,并在此基础上,对基于星间链路观测的用户航天器自主导航进行仿真。
4.1 基准航天器仿真算例
基准航天器观测的3颗脉冲星为PSR B1937+21、PSR B1821-24和PSR B0531+21,导航初始误差均为(1 km,1 km,1 km)和(1 m/s,1 m/s,1 m/s),导航步长为30 min。
位于地球高轨的3颗基准航天器A、B、C的轨道根数如表1所示;位于地月L2平动点轨道的基准航天器在地月质心旋转坐标系下的初始状态为(1.177 5,0,0.056 067 436 341 83,0,–0.171 810 725 634 8,0)。
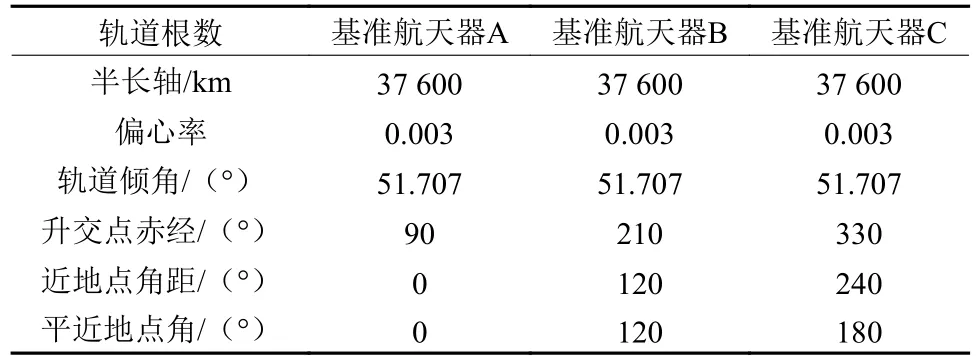
表1 地球高轨基准航天器A、B、C的轨道根数Table 1 Orbit elements of the HEO primary navigation reference spacecraft ABC
对于基准航天器来说,地球高轨的基准航天器A与L2平动点Halo轨道的基准航天器定位结果(3σ)分别如图6和图7所示。
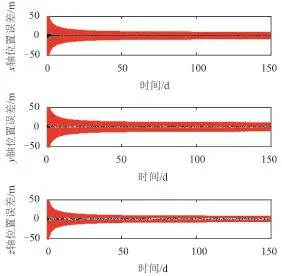
图6 地球高轨基准航天器A位置估计误差Fig.6 Position estimation error of the HEO basis spacecraft A
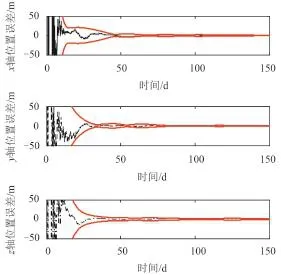
图7 地月平动点基准航天器位置估计误差Fig.7 Position estimation error of the basis spacecraft in earth-moon L2 libration point
仿真表明,在脉冲星差分观测与星间链路观测时,地球高轨与平动点轨道下的基准航天器可以达到20 m的定位精度。
4.2 用户航天器仿真算例
基准航天器在实现自主导航以后,用户航天器通过与基准航天器进行通信,获得相应的星间链路观测信息。位于地球高轨的两颗用户航天器F、G的轨道根数如表2所示,在此首先给出高轨用户航天器F观测高轨基准航天器A、B、C时的定位结果(3σ),如图8所示。
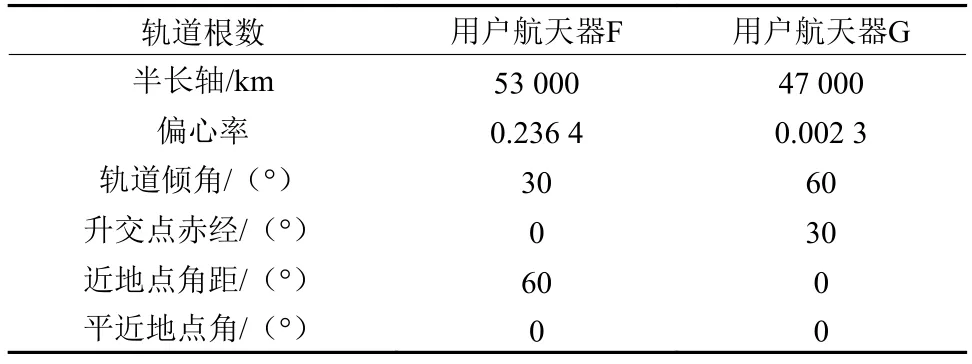
表2 地球高轨用户航天器F、G的轨道根数Table 2 Orbit elements of the HEO customer spacecrafts F and G
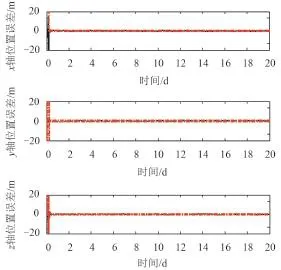
图8 第一层用户航天器F的位置估计误差Fig.8 Position estimation error of customer spacecraft F in the first layer
用户航天器F通过直接与基准航天器A、B、C通信实现状态确定后,可以作为地月系统的第一层用户航天器,月球探测器H可以通过观测第一层用户航天器F的导航信息进行相应的状态估计。
位于地月转移段的月球探测器在J2000.0地心惯性坐标系下的轨道根数为
a=180 439.826 734 619 km,e=0.002 686 217 427,
i=–114 293 944.958 791°,Ω=–0.000 157 042 228°,
ω=–339.752 165 987 78°,f=15.377 008 147 734°。
月球探测器H在地月转移段初期,观测基准航天器A、B与用户航天器F获取相应的导航信息,在运行一段时间后,观测地月L2平动点Halo轨道的基准航天器D、E获取导航信息。H的导航初始误差均为(10 km, 10 km,10 km)和(10 m/s,10 m/s,10 m/s),导航步长30 min,星间链路的测量误差根据传感器测量精度给定[15],取1 m,在观测高轨航天器A、B、F时,H的定位结果(3σ)如图9所示;观测地月L2平动点Halo轨道的基准航天器D、E时,H的定位结果如图10所示。
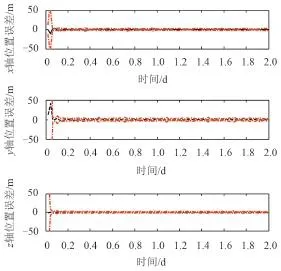
图9 用户航天器观测地球高轨基准航天器A、B与用户航天器F时位置估计误差Fig.9 Position estimation error of the customer spacecraft F when observing basis spacecraft A, B and customer spacecraft F
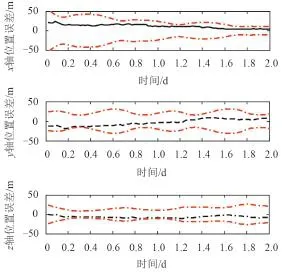
图10 用户航天器观测Halo轨道的基准航天器D、E时位置估计误差Fig.10 Position estimation error of the customer spacecraft G when observing Halo orbit basis spacecraft D、E
仿真表明,不论观测基准航天器,还是观测上一层用户航天器,都可以使月球探测器在轨道转移阶段达到优于30 m的定位精度,基于星联网的航天器自主导航方案是可行的。
5 总结与展望
本文提出了星联网的概念,对星联网的应用体系与方案进行了相应的研究。通过对星联网支持下月球探测任务的仿真,验证了基于星联网系统实现航天器自主导航的可行性。结果表明,星联网系统中的基准航天器,可以摆脱对地面站的依赖,实现高精度自主导航。星联网系统中的用户航天器,通过星间链路观测基准航天器或其他用户航天器获得相应的导航信息,可以实现自身的状态估计。
为了进一步完善星联网系统的理论体系,提高系统的导航性能,在现有的基础上,可以从星联网的导航误差传播规律、航天器导航策略优化、地面仿真验证等方面进行深入研究。星联网体系的发展与完备,可以为我国构建天基自主基准导航系统提供支持,为增强我国深空航天器的生存能力提供有力支撑。
[1]张伟,张恒.天文导航在航天工程应用中的若干问题及进展[J].深空探测学报,2016,3 (3):204-213.Zhang W, Zhang H.Research on problems of celestial navigation in space engineering[J].Journal of Deep Space Exploration,2016, 3(3):204-213.
[2]陈晓,尤伟,黄庆龙.火星探测巡航段天文自主导航方法研究[J].深空探测学报,2016,3 (3):214-218.Chen X, You W, Huang Q L.Research on celestial navigation for Mars missions during the interplanetary cruising, Journal of Deep Space Exploration, 2016,3 (3):214-218.
[3]Schier J.Space communications and navigation.space communications and navigation(SCaN)Network Architecture Description Document(ADD)Volume 1:Executive Summary[R].Washington D.C:NASA Headquarters,2011.
[4]Tai W,Wright N.Integrated network management(INM)and integrated service execution[R].[S.l.]:NASA ,2011.
[5]Anzalone E.Simulation and analysis framework for deep space navigation design[C]//Guidance,Navigation,and Control Conference.Breckenridge,CO:[s.n.],2014.
[6]Anzalone E,Becker C,Crump D,et al,Multi-spacecraft autonomous positioning system:LEO demo development[C]//29th Annual AIAA/USU Conference on Small Satellites.[S.l.]:AIAA,2015.
[7]王大轶,李骥,黄翔宇,等.月球软着陆过程高精度自主导航避障方法[J].深空探测学报,2014,1 (1):44-51.Wang D Y, Li J, Huang X Y, et al.A pinpoint autonomous navigation and hazard avoidance method for lunar soft landing [J].Journal of Deep Space Exploration, 2014, 1 (1):44-51.
[8]Chester T J,Butman S A.Navigation using X-ray pulsar[R].Washington:NASA,1981.
[9]郑伟,王奕迪,汤国建,等.X射线脉冲星导航理论与应用[M].北京:科学出版社,2015:1-3.Zheng W,Wang Y D,Tang G J,et al.X-ray pulsar-based navigation:theory and applications[M].Beijing:Science Press Ltd.,2015:1-3.
[10]Sheikh S I.The use of variable celestial X-ray sources for spacecraft navigation [D].Maryland:University of Maryland,2005.
[11]Xiong K,Wei C L,Liu L D.Research on autonomous navigation of satellite constellation based on X-ray Pulsars [J].Journal of Astronautics,2008,29(2):545-549.
[12]刘利.基于X射线脉冲星的星座定向参数确定方法研究[D].长沙:国防科学技术大学,2014.Liu L.Orientation parameters determination of the navigation satellites constellation via X-ray pulsars measurement [D].Changsha:National University of Defense Technology,2014.
[13]Wang Y D,Zheng W,Sun S M,et al.X-ray pulsar-based navigation for interplanetary ephemerides for earth-orbiting satellite [J].Advance in Space Research,2013,51:2394-2404.
[14]Bhasin K,Hayden J L.Space based internet network emulation for deep space mission appilications.[C]// 2004 AIAA International Communications Satellite Systems Conference and Exhibit.Monterey,California,United State:AIAA,2004:1180.
[15]朱俊,廖瑛,文援兰.基于星间测距和地面发射源的导航星座整网自主定轨[J].国防科技大学学报,2009,31 (2):16-19.Zhu J, Liao Y, Wen Y L.The integrated autonomous orbit determination of the navigation constellation based on crosslink range and ground-based emitter[J].Journal of National University of Defense Technology, 2009, 31(2):16-19.
郑伟(1972– ),男,教授,博士生导师。主要研究方向:飞行动力学与控制、深空探测、航天器自主导航。
通信地址:湖南省长沙市国防科技大学航天科学与工程学院(410073)
电话:(0731)84573139
E-mail:zw_nudt@189.cn
Design of Deep Space Autonomous Navigation System Based on Spacecraft Networking
ZHENG Wei,ZHANG Lu,WANG Yidi
(School of Aerospace Science and Engineering,National University of Defense Technology,Changsha 410073,China)
In order to reduce the heavy burden on the ground-based network,as well as increasing navigation efficiency for deep space explorers,a method of autonomous navigation based on Spacecraft Networking is proposed in this article.The network comprises two types of spacecraft,namely,basis spacecraft and customer spacecraft.The basis spacecraft implement autonomous navigation by observing X-ray pulsar,inter-ranging,etc.The basis spacecraft provides the standard basis for the whole network,and a customer spacecraft determines its position by communicating with the basis spacecraft or with the other customer spacecraft.The specific scheme of Spacecraft Networking is illustrated by an example of Earth to Moon transfer mission.The configuration scheme and the navigation method of the basis spacecraft are analyzed in this paper,and the navigation method for single and multitiered customer spacecraft is presented in this paper.Simulations demonstrate that by measuring X-ray pulsar and inter-ranging links,the basis spacecraft can reach the accuracy of 20 m.When observing the basis spacecraft,the customer spacecraft in Earth to Moon transfer orbit can reach the accuracy of better than 30 m.Autonomous navigation based on Spacecraft Networking is feasible and can significantly benefit China’s Space-based navigation system.
spacecraft networking;autonomous navigation;pulsar;Earth to Moon transfer mission
V249
:A
:2095-7777(2017)01-0031-07
10.15982/j.issn.2095-7777.2017.01.005
郑伟,张璐,王奕迪.基于星联网的深空自主导航方案设计[J].深空探测学报,2017,4(1):31-37.
Reference format:Zheng W,Zhang L,Wang Y D.Design of deep space autonomous navigation system based on spacecraft networking [J].Journal of Deep Space Exploration,2017,4(1):31-37.
[责任编辑:高莎,英文审校:任树芳]
2016-11-01
2017-01-07
猜你喜欢
作文大王·笑话大王(2023年8期)2023-07-17 04:09:28
军事文摘(2023年12期)2023-06-12 07:51:00
科学(2022年4期)2022-10-25 02:43:42
国际太空(2022年7期)2022-08-16 09:52:50
空间科学学报(2020年3期)2020-07-24 09:23:28
国际太空(2019年9期)2019-10-23 01:55:34
国际太空(2018年12期)2019-01-28 12:53:20
国际太空(2018年9期)2018-10-18 08:51:32
测绘科学与工程(2017年4期)2017-05-25 01:48:16
北京航空航天大学学报(2016年6期)2016-11-16 01:50:43