
直流换流站绝缘子除污机器人研制与应用
2017-06-05 14:15崔国强
山东电力技术 2017年2期
李 浩,崔国强
(国网山东省电力公司检修公司,济南 250118)
直流换流站绝缘子除污机器人研制与应用
李 浩,崔国强
(国网山东省电力公司检修公司,济南 250118)
随着工业化水平的不断提高,环境问题越来越严重,雾霾、酸雨、扬尘等恶劣天气越来越频繁,绝缘子污染程度日益严重,给电力设备的可靠运行造成巨大安全隐患。各种粉尘在风力、重力、电场力的作用下绝缘子设备的污秽快速增长,当天气潮湿时,灰尘中的可溶性物质溶于水中,形成导电水膜,泄漏电流沿绝缘子的表面流过造成闪络事故。针对现状,研制直流换流站绝缘子除污机器人,该机器人能够自动适应攀爬各种直径的绝缘子,自动识别和跨越法兰,可在绝缘子上完成行走、吹灰、清污、喷水、吹干等一系列工作,安全、高效、便捷、智能地完成绝缘子清扫除污工作,为直流输电系统的稳定运行提供有力保障,具有很高的行业推广价值,为绝缘子设备检修工作标准化提供新途径。
绝缘子;清扫除污;机器人
0 引言
银东直流输电工程是世界上首个±660 kV电压序列的直流输电工程,是国家“西电东送”和“外电入鲁”的标志性工程,胶东站是山东省境内首座直流换流站,全年保持满负荷4 000 MW运行,对山东省经济发展和社会进步起着至关重要的作用。
目前绝缘子清扫主要有3种方法:停电清扫、带电清扫和带电水冲洗。带电清扫和带电水冲洗受设备安全距离、技术条件等因素限制较大,停电清扫是最基本最有效的方法。因此换流站年度的停电检修除了设备定期试验及缺陷消除外,绝缘子清灰工作也成为检修工作的重点项目。由于绝缘子高达20余米,清扫绝缘子属于高空特种作业,清灰难度大,作业效率低,而绝缘子又是换流站内最多的设备,数量多达上万只,因此绝缘子清扫工作费时费力,很难在有限的检修时间内保质保量完成工作。直流换流站绝缘子除污机器人的应用很好地解决了上述问题[1]。
1 除污机器人组成
绝缘子清扫除污机器人主要由抱紧装置、弹性清扫机构、行走装置、喷液装置、清扫手臂等系统组成。
1.1 抱紧装置
绝缘子履带抱紧装置,可适用于不同尺寸的绝缘子,自动感应压力。
抱紧装置由可调高度单元 (曲柄摇杆机构)、连杆、固定螺栓等构成,如图1所示。抱紧装置通过调节高度,使得绝缘子除污机器人行走机构紧贴绝缘子表面,以实现沿绝缘子的连续移动,实现对多种直径绝缘子的适用性及对绝缘子连接法兰的通过性。

图1 抱紧装置3D图
机器人工作时,抱紧装置通过曲柄摇杆机构和连杆机构实现履带轮的抱紧和扩张,由电动伸缩杆带动滑块上下移动,进而带动履带轮贴紧或松开绝缘子,同时也使机器人能适用于不同尺寸的绝缘子。伸缩杆通过螺杆传动,具有自锁功能,当意外断电或出现其他故障时可保证机器人仍然呈抱紧状态而不跌落。
1.2 弹性清扫机构
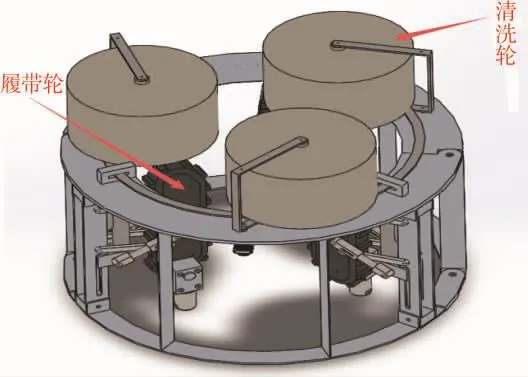
图2 弹性清扫机构3D图
绝缘子除污机器人弹性清扫机构由动力电机、清污刷、传动轴、定位销、轴承等部件构成,如图2所示。安装在弹性清扫机构支架,可根据绝缘子的直径调节行走力度,更换不同材质、硬度、密度的清污刷,实现不同直径绝缘子的清扫除污以及去除表面覆雪、覆冰。弹性清扫机构支架通过动力电机的转动实现同步的角度转变,以达到对绝缘子全面清扫的目的。
1.3 行走装置
绝缘子除污机器人行走装置由履带、电机、防履带侧滑板、驱动轮、转轴、飞轮、连杆、定位螺栓等构成。便于机器人在绝缘子上行走,行走装置结构如图3所示。
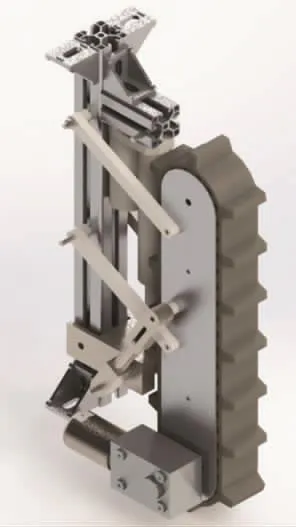
图3 行走装置3D图
1.4 喷液系统
绝缘子除污机器人喷液系统可实现在绝缘子除污机器人工作时同步进行清洗剂及纯净水的切换喷射,是绝缘子清扫除污的重要步骤之一[2]。绝缘子除污机器人喷液系统由高压喷嘴、连接管件、绝缘子除污机器人喷液系统控制柜构成。1台绝缘子除污机器人一般配备3~8个高压喷头,由耐高温高压管连至绝缘子除污机器人喷液系统控制柜中,实现喷水和喷清洗剂切换。
绝缘子除污机器人喷液系统控制柜,设有高压水泵、快装接头、耐高温高压管、逆止阀、安全阀、三通阀、减压单元、流量控制器、延时控制器、过滤器、切换单元、无线控制器及接收单元、电流源模块、安全空气开关等。喷液系统工作流程如图4所示,喷液系统构成如图5所示。
1.5 清扫手臂
绝缘子除污机器人清扫手臂由动力电机、转轴、传动连片、传动支架、滑块、弹性清扫机构、弹性清扫机构支架等部件构成,如图6所示。

图4 喷液系统工作流程

图5 喷液系统
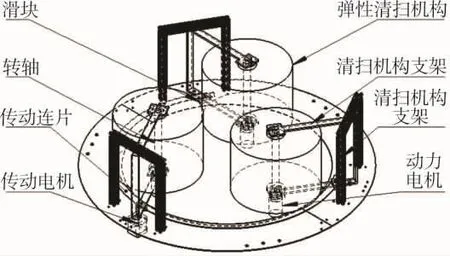
图6 清扫手臂结构
弹性清扫机构支架通过动力电机的转动来实现同步的角度转变,以实现除污机器人对绝缘子的全面清扫。电机与其中1个支架的转轴相连,各支架接有滑块,每个滑块与传动连片铰接,使圆环只能绕圆心转动。当电机带动其中1个支架转动时,通过滑块与传动连片的传动,可以实现其他支架的同步转向,从而控制清扫手臂前端清污刷与绝缘子表面的接触面积和压力,达到更好地清扫除污效果[3]。同时可根据绝缘子的直径来调节行走力度,更换不同材质、硬度、密度的清污刷,实现不同直径的绝缘子清扫除污以及去除绝缘子表面覆雪、覆冰。
2 系统开发及软硬件实现
直流换流站绝缘子除污机器人能够自动适应攀爬一定直径范围的绝缘子,并且能够自动识别和跨越法兰。在攀爬的过程当中,通过高速旋转的清污刷和高压液体、气体喷枪,安全高效地完成绝缘子清灰工作,机器人配备遥控器,从机器人识别特定绝缘子抱紧,到攀爬清灰等工作,均可由遥控器、人机结合智能控制,极大解放人力,通过自主开发设计的严谨代码逻辑进行控制保护,在保证安全的情况下,大大提高工作效率。
2.1 系统组成
直流换流站绝缘子除污机器人可大体分为电源、控制、检测以及执行4个模块,系统构成如图7所示。其中控制模块包括机器人MCU的自动控制以及通过遥控器的人为控制。电源模块为系统各部分提供电源,使用220 V交流供电取代电池供电,一方面可为机器人的清扫工作提供充足的电能,另一方面可减小机器人整体重量,从而减小对绝缘子的压迫损害。220 V的交流电经过电源转换器至12 V的直流电,使用单独的电源模块,12 V直流电至3.3 V的直流降压集成在控制器电路板上,使用隔离降压芯片将整个电源电路分割成两个部分,分别给控制电路和电机供电,以减少干扰。执行模块则包括电机、水泵等,执行机器人行走、吹灰、清污、喷水、吹干等一系列流程功能。检测模块包括压力传感器,红外测距传感器等。各模块之间相互配合,以实现对绝缘子的智能清扫。

图7 系统组成
2.2 系统工作流程
除污机器人工作流程如图8所示,机器人通电后履带轮将自动张开至最大,将机器人包合在绝缘子上并合上锁扣,检查无误后遥控履带轮缩紧,通过履带上的压力传感器判断履带轮对绝缘子的压力大小,当履带轮与绝缘子贴合到设定压力时,自动停止收缩,然后可手动或自动的开始执行履带轮转动、清污刷转动、喷水、吹灰等工作,此时机器人进入清扫流程。与此同时,机器人的故障检测系统也会开启,当遇到履带卡顿、电路短路等问题时将启动报警装置,通知维护人员检测维修、排除故障。当机器人检测自身已爬至绝缘子顶端时,将自动使履带电机反转,开始下行清扫,同时开启气泵喷出高压气体,将绝缘子上的残留水分吹干。当机器人检测自身已爬至绝缘子底端时,将停止工作并发出声光提示,通知运检人员清扫工作结束,准备进行下一根绝缘子的清扫。
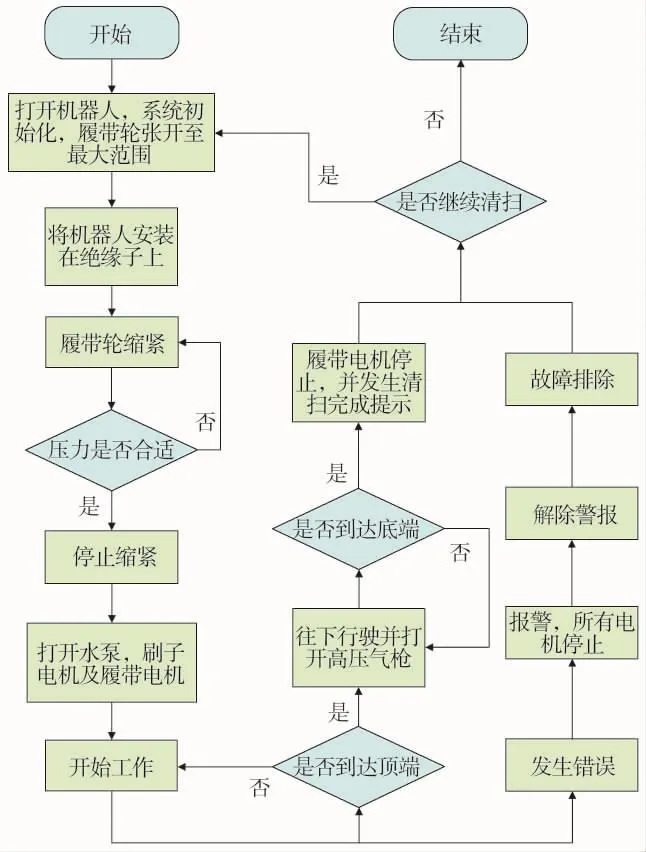
图8 工作流程
3 系统技术性能
控制模块以Cortex-M3内核的STM32F103x系列ARM处理器为中央处理器,搭载各种外围驱动电路,如步进电机驱动电路、直流电机驱动电路、激光传感器驱动电路、电源电路等。所有硬件电路集成在一个双层PCB电路板上,留有外部接口。电路板表面喷涂三防漆来保护电路,保证电路板的性能,提高其寿命。将整个电路板封装在铝合金外壳中,以提高其防电磁干扰的能力。其中MCU的电源由B1205S-2W芯片进行隔离降压得到,可有效减小电机对控制信号的干扰。
电机采用HB-57FS系列防水步进电机,可减小喷水清洗工作中对机器人自身的损害。通过配备不同减速比的齿轮箱可分别为清污刷转动、履带轮的转动及伸缩提供动力。
机器人的电源选用明纬超薄电源LRS-200-12,交流输入电压通过开关切换10V/220V,直流输出范围为12V,0~17A。具有短路保护、过载保护、过电压保护、过热保护等防护功能。
清污刷可根据绝缘子的尺寸、结构选装。清污刷采用尼龙、复合材料,质量轻、耐摩擦,不伤害绝缘子表面。配合水流对绝缘子进行清洗可取得很好的清扫除污效果。
履带及配套履带轮选用橡胶材料,耐摩擦,且对绝缘子抓紧力高,驱动轮则采用超高分子聚乙烯材料,质量轻,强度高。履带尺寸根据绝缘子尺寸设计,保证机器人能跨过连接绝缘子的法兰。
履带轮抱紧绝缘子通过结合曲柄摇杆机构以及连杆机构来实现,由电动伸缩杆带动滑块上下移动,进而带动履带轮贴紧或松开绝缘子,同时也使机器人能适用于不同尺寸的绝缘子。伸缩杆通过螺杆传动,具有自锁功能,当意外断电或出现其他故障时可保证机器人仍然呈抱紧状态而不跌落。
3个清污刷支架可以通过1个电机的转动来实现同步角度改变,实现全面清扫。电机与其中1个支架的转轴相连,各支架接有滑块,3个滑块与圆环铰接,圆环只能绕圆心转动。当电机带动其中1个支架转动时,通过滑块与圆环的传动,可以实现另外两个支架的同步转动。
主体框架选用铝合金材料,在保证强度的同时使其拥有着较轻的质量。机器人可对半打开,以便安装在绝缘子上。两部分通过合页与搭扣连接。
4 结语
直流换流站绝缘子除污机器人的研制与应用,解决了目前国内换流站支柱绝缘子清灰的难题:降低绝缘子积灰程度,提高设备的绝缘水平,增强设备的运行稳定性[4]。
[1]孙斌,徐威,杨汝清.高压绝缘子清扫机器人的动力学建模及分析[J].上海交通大学学报,2004,38(8):1 304-1 306.
[2]张建兴.悬式瓷制绝缘子表面污秽程度预测方法的研究[D].保定:华北电力大学,2005.
[3]雷成华.便携式输电线路绝缘子清扫装置的研制[J].机电信息,2015(9):58-59.
[4]王辉.浅谈高压绝缘子的维护与检修技术[J].中国科技纵横,2011(8):89.
Development and Application of DC Converter Station Insulators Decontamination Cleaning Robot
LI Hao,CUI Guoqiang
(State Grid Shandong Electric Power Maintenance Company,Jinan 250118,China)
With the continuous improvement of the level of industrialization,environmental issues and inclement weather,such as haze,acid rain and dust,have become more serious frequently.The degree of insulator pollution is becoming more and more serious,which results in a huge security risk to the reliable operation of power equipment.Under the action of wind force,gravity and electric field force,the pollution of insulator is increasing rapidly.When the weather is wet,the soluble substance in dust is dissolved in water, forming a conductive film, and the leakage current will flow along the insulator surface,resulting in flashover accident.Aimed at the present situation,a DC converter station insulator decontamination cleaning robot is developed which can automatically adapt to climb various diameters insulators, identify and across the flange,and can walk on the insulator,blow soot,purge,spray,blow dry and more.The insulator cleaning decontamination work can be completed safely,efficiently,conveniently and intelligently by the robot,which provides a strong guarantee for the stable operation of the HVDC system and a new way for the standardization of the insulator equipment overhaul work.So the robot should have a high overall industry application value.
insulators;decontamination cleaning;robot
TP242
A
1007-9904(2017)02-0011-04
2016-08-15
李 浩(1982),男,工程师,从事高压交直流输电系统运维检修;
崔国强(1985),男,从事高压交直流输电系统运维检修。
猜你喜欢
中国石油石化(2021年8期)2021-03-30
石油化工建设(2019年6期)2020-01-16
通信电源技术(2018年3期)2018-06-26
石油化工建设(2017年2期)2017-06-05
湖北电力(2016年8期)2016-05-09
湖北电力(2016年8期)2016-05-09
电网与清洁能源(2015年5期)2015-12-29
电力建设(2015年2期)2015-07-12
橡胶工业(2015年4期)2015-02-23
电测与仪表(2014年6期)2014-04-04
