丘陵地区双向仿形镇压装置设计与试验
2017-06-05 15:00赵淑红刘宏俊谭贺文杨悦乾张先民
农业机械学报 2017年4期
赵淑红 刘宏俊 谭贺文 杨悦乾 张先民
(东北农业大学工程学院, 哈尔滨 150030)
丘陵地区双向仿形镇压装置设计与试验
赵淑红 刘宏俊 谭贺文 杨悦乾 张先民
(东北农业大学工程学院, 哈尔滨 150030)
针对镇压装置在丘陵地区作业时镇压不均匀、镇压强度不足等问题,借鉴丘陵山地农业机械结构特点,设计了一种能实现双向仿形和镇压强度可调的镇压装置。该装置主要由仿形调节机构、镇压强度调节机构和镇压轮组成。建立了丘陵地形下镇压轮与土壤相互作用模型,对镇压轮进行受力分析,确定镇压轮工作过程,同时对镇压装置进行受力分析,确定弹簧变形量(镇压强度)的合理范围。进行对比试验和田间性能试验,采用L9(34)正交试验,考察镇压轮类型、镇压强度、作业速度对镇压装置作业性能的影响,得到了各因素的主次顺序:镇压轮类型、弹簧变形量(镇压强度)、作业速度,最优组合:橡胶镇压轮、弹簧变形量20 mm、作业速度1 m/s,此时牵引阻力为22.3 N,根冠比为0.271。通过对比试验,证明仿形镇压装置更能保证镇压均匀性。
丘陵地区; 镇压装置; 仿形; 设计; 试验
引言
镇压装置[1-3]是播种机的重要工作部件,主要由支架、仿形机构和镇压轮等组成,其性能决定播种作业质量。北方大豆和玉米作业区采用平作、垄作和间作种植方式,要求镇压装置能适应不同作物播种和镇压作业要求,同时不需要额外配重。
研究人员[4-8]对镇压装置进行了深入研究。佟金等[9]采用ABAQUS有限元方法对传统和仿生镇压辊的作业性能进行试验研究;贾洪雷等[10]结合仿生方法,设计出一种滑移率低、镇压力分布均匀的仿形弹性镇压辊;贾洪雷等[11]设计出一种具有覆土功能的弹性镇压轮,能同时实现覆土和镇压作业;王景立[12]针对镇压器适应性差等问题,设计出一种可变力镇压器;贾洪雷等[13]设计出一种仿形弹性镇压辊。上述研究主要是针对镇压装置在平原地区的作业性能研究,而针对丘陵(坡度5°~25°)地区作业性能的研究未见报道。在丘陵地区实际播种和镇压作业时,传统镇压装置存在横向镇压不均匀等问题。
针对北方地区种植方式和丘陵地区镇压不均匀、镇压强度不足等问题,本研究借鉴丘陵山地农业机械特点[14-18],设计一种能实现双向仿形和镇压强度可调的镇压装置。
1 镇压装置组成和工作原理
该机构主要由镇压轮、仿形调节机构、镇压强度调节机构和支架等组成,如图1所示。

图1 仿形镇压装置结构示意图Fig.1 Schematic diagram of profiling press device1.吊杆 2.限位板 3.平衡弹簧 4.下支架 5.镇压轮 6.镇压强度调节机构 7.前梁 8.上支架
镇压强度调节功能:通过改变弹簧的拉伸量来改变弹簧的拉伸力,进而改变镇压强度,最终达到要求的镇压目的。
仿形调节功能:上支架铰接在前梁上,作业过程中,保证镇压装置在纵向上能随着地形的高低起伏运动,实现作业过程中随地形仿形。下支架和固定在上支架尾部的吊杆相铰接,下支架能相对于上支架横向转动,进而实现横向仿形。播种机在丘陵地区作业时,机架与φ角斜面平行。传统的镇压装置,镇压轮与上支架刚性连接,无法相对于上支架横向转动,故与覆土后土壤表面存在一定夹角,这样横向镇压轮入土深度不一致,导致横向镇压不均匀,如图2a所示。双向仿形镇压装置的镇压轮可以绕铰接点相对机架转动,在重力与平衡弹簧共同作用下能与覆土后的表面平行,镇压轮入土深度一致,横向镇压均匀,如图2b所示。镇压装置左右吊杆铰接在下支架上,主要用来控制左右晃动,保证支架能自动归位。

图2 镇压装置运动示意图Fig.2 Motion sketches of press device
自动归位功能:当播种机被放下时,镇压轮可以实现自动归位,这样可以减轻对镇压装置的冲击力,保护镇压轮及其轴承。
2 关键部件设计及参数确定
仿形调节机构、镇压轮和镇压强度调节机构是装置的关键部件。在作业过程中,仿形调节机构和镇压强度调节机构同时工作,能保证播种机在平原和丘陵地区对不同作物进行正常镇压作业。
2.1 仿形调节机构设计
仿形调节机构主要由限位板、吊杆、下支架、轴套等部件组成。
2.1.1 平衡调节机构运动分析
左右吊杆在平衡弹簧和限位孔的控制下,相对于限位板只有2个自由度:沿限位孔进行横向移动和在限位板垂直方向移动,如图3所示。

图3 仿形调节状态示意图Fig.3 Diagrammatic sketch of profilling adjustment state
2.1.2 仿形机构参数设计
图4中O1、O2、O3为吊杆与下支架的铰接点,h为铰接点O1与限位板顶端的距离,L1为左右吊杆长度,L为铰接点O2或O3与铰接点O1的距离,Δd1为铰接点O2或O3水平位移,Δd2为铰接点O2或O3垂直位移。由图4可知,当下支架绕铰接点O1运动时,绕铰接点O2和O3向铰接点O1靠拢。
吊杆过长,会影响装置的稳定性;吊杆过短,容易出现吊杆脱落现象。图4中仿形角为α时,右侧杆下降,左侧杆上升。当向另一侧仿形时,左右吊杆的运动相反。为了保证镇压装置结构紧凑,取L=80 mm,h=150 mm。由图3可知
Δd2=Lsinα
(1)
L1≥h+Δd2
(2)
该仿形主要是针对丘陵设计,丘陵坡度5°~25°,经计算得出L1≥183.8 mm,取L1=200 mm。
限位孔结构参数见图5。吊杆在限位孔内沿孔进行横向移动,限位孔过长,造成浪费;限位孔过短,影响仿形,故应在合理范围内取值,由
Δd1=L(1-cosα)
(3)
当α≤25°时,经计算得出d1<7.5 mm,取d1=7.5 mm。

图4 仿形机构结构参数Fig.4 Structural parameters of profiling mechanism
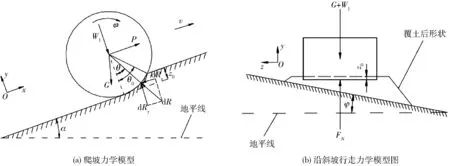
图6 镇压轮受力分析图Fig.6 Sketches of forces on press wheel

图5 限位孔结构参数Fig.5 Structural parameters of spacing hole
2.1.3 平衡弹簧设计
平衡弹簧对仿形和运输时控制仿形装置稳定性起着重要作用。若平衡弹簧选择不合理,则影响仿形质量,影响运输过程中机器的稳定性。为了保证镇压装置工作性能的稳定性和弹簧的寿命,根据机械设计手册选择YI冷卷压缩弹簧,其具体参数:中径为16 mm,圈数为20,直径为1.7 mm。
2.2 镇压轮运动特性及参数确定
镇压轮与覆土后的土壤之间的相互作用是个复杂动态过程。平原地形下镇压轮与土壤之间的相互作用模型应用广泛,而针对丘陵地形下镇压轮与土壤之间的相互作用模型尚未见报道,故有必要建立相应模型。
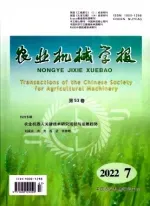
2.2.1 丘陵地形下镇压轮与土壤相互作用模型
镇压轮在丘陵地区作业时,按运动方向正交分解为沿α角斜面上爬坡和沿φ角斜面上行走,见图6。在重力作用下,覆土后扰动土壤的表面在φ角斜面上与地平线平行。镇压轮的运动可近似看作纯滚动。图6表示在下陷量为z0时镇压轮受力情况,其中v为前进速度,ω为角速度,P为牵引力,W1为镇压装置施加给镇压轮的载荷;dR为镇压轮边缘任意一点受到土壤反作用合力,其方向通过镇压轮中心,dRy和dRx为dR在xOy平面中的正交分解力,θ0为镇压轮渐近角。忽略轮子轴套的摩擦力矩,同时不考虑土壤颗粒沿法向变形。土壤对镇压轮微面积法向力的水平分力积分等于Rx,即前进阻力;土壤对镇压轮微面积法向力的垂直分力积分等于Ry,即垂直阻力。
根据地面力学对图6a建立力学平衡方程
(4)
Ry=∫dRy=W1+Gcosα
(5)
P=Rx+Gsinα
(6)
式中D——镇压轮直径,mmb——镇压轮宽度,mmG——镇压轮重力,Np——深度z0处的抗压强度Q——土壤受到镇压轮的总载荷,N
考虑土壤垂直方向的压缩,忽略在纵向上挤压变形,故采用Reece承压模型[19]
(7)
式中γs——土壤容重c——土壤内聚力k′c、k′φ——无量纲土壤内聚力和摩擦变形模量z——下陷量n——土壤变形指数,取n=1
由图7得到z与θ之间的关系
(8)
对式(8)进行积分得
(9)
对式(4)、(7)、(9)整理可得
(10)
(11)
考虑到θ较小,故简化式(11)得
(12)
同理
W1+Gcosα
(13)
(14)
在丘陵地区作业时,双向仿形镇压装置的镇压轮受力W1与F1的夹角为φ,故可得
W1=F1cosφ
(15)
式中F1——上支架对下支架的垂直分力,N
联立式(12)、(14)、(15)得
(16)
由式(16)可知,土壤条件、结构参数、载荷和地形决定镇压轮工作阻力。载荷和工作阻力呈正相关。载荷越大,工作阻力越大,能量消耗越多;载荷不易过小,否则镇压不足。镇压强度过大或者过小均影响镇压质量。

图7 土粒的法向位移和镇压轮转角关系示意图Fig.7 Relationship schematic between soil particles displacement and rotation angle of repressive law
2.2.2 镇压轮结构参数
(1)宽度
镇压轮宽度决定着镇压作业质量。在载荷一定的情况下,镇压轮宽度过小,容易造成局部镇压强度过大,下陷量过大;镇压宽度过大,镇压强度不够,不能满足作物生长要求。根据文献[13]可知,镇压轮宽度应在开沟宽度和播种行距之间。本研究主要针对玉米平作和垄上双行(行间距0~150 mm),按照《农业机械手册》相关要求,选择镇压轮宽度b=210 mm。
(2)直径
镇压轮直径与作业性能有着很大的关系。当前进速度和载荷一定时,若镇压轮直径过小,镇压时间短,对土壤的镇压不够,拖土壅土现象严重;若镇压轮直径过大,影响机器工作的稳定性,故镇压轮直径应在合理的范围(200~500 mm)内取值[11]。在保证工作稳定性和作业性能的前提下,结合农艺要求,选择镇压轮直径D=300 mm。
2.2.3 镇压轮类型
根据农艺要求,设计3种镇压轮(刚性镇压轮、橡胶镇压轮和鼠笼镇压轮)。刚性镇压轮结构简单,压力分布均匀;橡胶镇压轮的橡胶轮变形与复原相互交替反复,压后地表产生鳞片状裂纹较少,镇压质量好;鼠笼镇压轮,几乎不存在壅土,种子与土壤接触紧密。3种镇压轮的镇压效果有待试验验证。
2.3 镇压强度调节机构
镇压强度调节机构主要由拉力弹簧、双向调节和支架组成。通过弹簧的拉伸程度来确定镇压强度。主要参数是弹簧变形量。
2.3.1 镇压装置受力分析
在镇压轮稳定工作时,镇压装置受力分析如图8所示,F4为下支架对上支架的垂直分力,与F1是一对平衡力,大小相等,方向相反,F2为下支架对上支架的水平分析力,F3为上支架对前梁的水平力,β为调节机构与上支架夹角。铰接点C主要受到镇压装置水平拉力,忽略竖直方向力,对镇压装置建立垂直方向力学平衡方程
F4=F1=Fsinβ
(17)
将式(17)代入式(15)得
W1=kΔlcosφsinβ
(18)
式中k——刚度,N/mmΔl——弹簧变形量,mm

图8 镇压机构受力分析示意图Fig.8 Force analysis diagram of press device
2.3.2 调节弹簧确定及参数确定
在受到载荷和重力的作用下,镇压轮下陷量的计算可简化为[13]
(19)
其中
K=α0(1+0.27b)
(20)
式中K——土壤特性系数α0——与土壤性质有关的参数
镇压轮接地面积S为
(21)
其中
(22)
式中β1——接触角l——镇压轮与地面接触弧长,cm
镇压轮接地压强为ρ,则
(23)
为了保证镇压装置工作性能稳定性和弹簧的寿命,选择带圆钩螺旋拉伸弹簧:中径为29 mm,圈数为14,直径为6 mm,切变模量为79 000 N/mm2。根据文献[20]确定其刚度k=37.5 N/mm。
通过上述公式可以求出,试验中采用变形量Δl分别为10、20、30 mm时,对应的接地压强均在30~50 kPa,满足东北地区土壤条件及其春季风大等环境下东北地区大豆和玉米的接地压强要求。
3 试验
为检验仿形镇压装置相比于传统镇压装置的仿形作业性能,在东北农业大学校内大豆试验田进行对比试验。为检验镇压装置的作业性能,在丘陵地形的东北农业大学向阳试验田进行作业性能试验。
3.1 对比试验
3.1.1 试验条件
2016年5月18—19日在东北农业大学校内大豆试验田进行对比试验。
试验条件:试验田长×宽为21 m×5 m,耕作方式为垄作,前茬作物为大豆,土壤为典型东北黑壤土,0~10 cm土壤容重为1.15 g/cm3,平均含水率为13.4%;10~20 cm土壤容重1.21 g/cm3,平均含水率为16.8%。
试验设备:约翰迪尔484型拖拉机,2BM-2型播种机,SC-900型土壤紧实度仪,环刀组件(容积100 cm3),JD1000-2型电子天平,干燥箱等。
3.1.2 试验方法
采用文献[13]的试验方法进行试验。试验前先用铧式犁进行起垄,然后人工修垄,控制垄台有一定倾斜角(8°)。在作业前进方向上,随机选取样点,测试取样点的土壤坚实度。
3.1.3 试验结果
由表1可知,双向仿形镇压装置的土壤坚实度差值为11.2~15.2 kPa,传统镇压装置的土壤坚实度差值为31.6~39.8 kPa。该结果与文献[13]的类似,表明试验结果的正确性。从试验结果中看出在垄台表面有一定倾角的条件下,双向仿形弹性镇压装置作业性能明显好于传统镇压装置,验证双向仿形镇压装置仿形作业性能,同时也验证设计的合理性。该试验结果为下一步性能试验提供了保证。

表1 取样点土壤坚实度差值测量结果
3.2 性能试验
为了验证丘陵地形下镇压轮与土壤相互作用模型的正确性,探究试验因素对试验指标影响规律,进行性能试验。通过正交试验,得到双向仿形镇压装置最优组合,并得到各因素对试验指标的影响。
3.2.1 试验条件
2016年5月22日在东北农业大学向阳试验田进行试验,试验设备同对比试验,如图9所示。

图9 田间试验Fig.9 Field test
试验条件:耕作方式为平作,前茬作物为玉米,土壤为典型东北黑壤土,土壤平均含水率13.4%,土壤硬度886 kPa,试验田坡度在7°~12°之间。
3.2.2 试验因素与试验指标
本研究选择弹簧变形量(镇压强度)、镇压轮类型和作业速度为试验因素。将牵引阻力(作业成本)和根冠比(作物生长状态)作为评价指标。牵引阻力由测试系统直接读取,根冠比计算公式为
(24)
式中m1——地下部干物质量,gm2——地上部干物质量,g
在玉米拔节期时,在每个标记的小区中选取5株玉米苗,将其分成地上部和地下部2 部分,根用清水洗净,分装于牛皮纸袋,于105℃杀青0.5 h,并在65℃下干燥至质量恒定,称其干物质质量。预试验和农学相应试验数据[21]发现控制播种深度、种子类型、土壤、光照条件等因素一致,与无镇压相比,镇压能使作物根冠比增加11%左右,同时镇压程度显著影响作物根冠比。
3.2.3 试验方案
每个因素各取3个水平,选用L9(34)正交表来安排试验,如表2所示。每次试验工作距离为5 m,平均株距20 cm,播种深度为5 cm,玉米(吉单618),光照充足。每次试验对试验地进行标记,方便后期对玉米样的采集。因素编码为A、B、C。

表2 正交试验因素水平
3.2.4 试验结果与分析
正交试验结果与极差分析如表3所示。
由表3可知各因素对牵引阻力和根冠比的影响情况。通过对试验结果的极差分析,得到影响牵引阻力的主次顺序为B、A、C,各因素的最优水平分别为A3、B1、C2,则最优组合为B1A3C2。同理,影响根冠比因素的主次顺序为A、B、C,各因素的最优水平分别为A2、B2、C1,则最优组合为A2B2C1。

表3 正交试验结果与极差分析
通过方差分析,对各因素影响牵引阻力和根冠比进行显著性检验,结果如表4和表5所示。

表4 牵引阻力方差分析
注:*** 代表极为显著,** 代表显著,*代表比较显著,下同。
由表4、5可知,镇压轮类型对牵引阻力和根冠比影响均显著;镇压强度(弹簧变形量)对牵引阻力影响极为显著,而对根冠比影响比较显著;前进速度对牵引阻力影响比较显著,而对根冠比影响不显著,这与极差分析的主次因素结论一致。因此,对于牵引阻力和根冠比而言,镇压强度的选择至关重要。
3.2.5 最优组合确定及验证
根据镇压装置作业性能要求,各试验指标分析所得优水平组合各不相同,为了达到兼顾平衡各项指标的目的,采用综合加权评分法进行分析,以选出令各项指标都尽可能最优的组合[22]。考虑到3个因素对衡量指标的重要程度,以100分作为总“权”,牵引阻力与根冠比各为50分,试验的综合加权结果如表6所示。

表5 根冠比方差分析

表6 综合加权结果
通过表6分析得出各试验因素对试验指标(牵引阻力、根冠比)影响的最优组合,各因素大小排列顺序为A、B、C,各因素最佳水平组合为A2B2C1,即橡胶镇压轮、弹簧变形量20 mm,作业速度为1 m/s。采用最优组合,在预留的试验田进行验证试验,试验结果:牵引阻力为22.3 N,根冠比为0.271,另外验证试验结果与正交试验结果对比,镇压机构的作业性能最优。
4 结论
(1)设计了一种可以实现双向仿形及具有调节镇压强度功能的镇压装置,并对装置关键参数进行设计,同时建立镇压轮与土壤相互作用模型。
(2)通过对比试验,确定双向仿形镇压装置仿形性能,结果表明镇压均匀性好,满足大豆种植农艺要求。
(3)采用L9(34)正交表进行田间试验,通过极差分析、方差分析和综合加权法得到影响镇压装置性能因素的主次顺序:镇压轮类型、弹簧变形量(镇压强度)、作业速度;最优组合:橡胶镇压轮、弹簧变形量20 mm,作业速度为1 m/s,此时牵引阻力为22.3 N,根冠比为0.271。
1 赵佳乐. 留茬行间交替耕作模式配套播种机关键技术研究[D]. 长春:吉林大学, 2015. ZHAO Jiale. Research of key technology of no-tillage seeder for stubble retain with alternating tillage[D]. Changchun: Jilin University, 2015.(in Chinese)
2 朱惠斌,李洪文,何进,等.稻茬地双轴驱动防堵式小麦免耕播种机[J/OL].农业机械学报, 2013, 44(6):39-44. http:∥www.jcsam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130608&flag=1. DOI:10.6041/j.issn.1000-1298.2013.06.008. ZHU Huibin, LI Hongwen, HE Jin, et al. No-till wheat seeder with two-axel drive anti-blocking in rice stubble field[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013,44(6):39-44.(in Chinese)
3 杨自栋, 刘宁宁, 耿端阳, 等. 2BYM-12型折叠式动力防堵免耕播种机设计与试验[J/OL].农业机械学报, 2013, 44(增刊1): 46-50. http:∥www.jcsam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2013s109&flag=1. DOI:10.6041/j.issn.1000-1298.2013.S1.009. YANG Zidong, LIU Ningning, GENG Duanyang, et al.Design and experiment on type 2BYM-12 folding and dynamic anti-blocking no-till planter[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013,44(Supp.1):46-50. (in Chinese)
4 贾洪雷,姜鑫铭,郭明卓,等.2BH-3型玉米行间播种机设计与试验[J/OL].农业机械学报, 2015, 46(3):83-89. http:∥www.jcsam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150312&flag=1. DOI:10.6041/j.issn.1000-1298.2015.03.012. JIA Honglei, JIANG Xinming, GUO Mingzhuo, et al. Design and experiment of type 2BH-3 inter-row seeder[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3):83-89.(in Chinese)
5 郭慧. 行间耕播机弹性镇压装置研究与试验[D]. 长春:吉林大学, 2014. GUO Hui. Research and experiment of elastic press device for inter-row till-planter[D]. Changchun: Jilin University,2014.(in Chinese)
6 贾铭钰. 免耕播种机镇压装置的试验研究及计算机辅助设计[D]. 北京: 中国农业大学, 2000. JIA Mingyu.Study on press-device of no-tillage seeder and CAD[D]. Beijing: China Agricultural University,2000. (in Chinese)
7 林伟. 基于精密播种技术的可变力镇压器应用研究[D]. 长春:吉林农业大学, 2013. LIN Wei. Variable force precision seeding technology based on the packer application research[D]. Changchun: Jilin Agricultural University,2013.(in Chinese)
8 刘庆福, 栾光辉. 垄上镇压式玉米精密播种机保墒抗旱播种试验[J]. 农业机械学报, 2007, 38(4): 197-198.
9 佟金, 张清珠, 常原, 等. 仿生镇压辊减粘降阻的有限元分析与试验验证[J/OL]. 农业机械学报, 2014, 45(7): 84-92. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140714&flag=1. DOI:10.6041/j.issn.1000-1298.2014.07.014. TONG Jin, ZHANG Qingzhu, CHANG Yuan, et al.Finite element analysis and experiment verification of bionic press roller in reducing adhesion and resistance[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(7): 84-92. (in Chinese)
10 贾洪雷, 王文君, 庄健, 等. 仿形弹性镇压辊减粘防滑结构设计与试验[J/OL]. 农业机械学报, 2015, 46(6): 20-27. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150604&flag=1. DOI:10.6041/j.issn.1000-1298.2015.06.004. JIA Honglei,WANG Wenjun, ZHUANG Jian, et al. Design and experiment on reducing soil adhesion and anti-slip structure of profiling elastic press roller[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(6):20-27. (in Chinese)
11 贾洪雷,郭慧,郭明卓,等.行间耕播机弹性可覆土镇压轮性能有限元仿真分析及试验[J].农业工程学报,2015,31(21):9-16. JIA Honglei, GUO Hui, GUO Mingzhuo, et al. Finite element analysis of performance on elastic press wheel of row sowing plow machine for covering with soil and its experiment[J]. Transactions of the CSAE, 2015, 31(21): 9-16. (in Chinese)
12 王景立. 精密播种机覆土与镇压过程对种子触土后位置控制的研究[D]. 长春: 吉林大学, 2012. WANG Jingli. The research of position control after seed contacting soil in the process of soil covering and rolling with precision seeder[D]. Changchun: Jilin University,2012.(in Chinese)
13 贾洪雷, 王文君, 庄健, 等. 仿形弹性镇压辊设计与试验[J/OL]. 农业机械学报, 2015, 46(6): 28-34. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150605&flag=1. DOI:10.6041/j.issn.1000-1298.2015.06.005. JIA Honglei,WANG Wenjun, ZHUANG Jian, et al. Design and experiment of profiling elastic press roller[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(6):28-34.(in Chinese)
14 刘大为, 谢方平, 李旭, 等. 小型果园升降作业平台的设计与试验[J]. 农业工程学报, 2015, 31(3): 113-121. LIU Dawei, XIE Fangping, LI Xu, et al. Design and experiment of small lifting platform in orchard [J]. Transactions of the CSAE, 2015, 31(3): 113-121. (in Chinese)
15 宋江, 邱胜蓝, 王新忠. 4B-1200 型平贝母药材收获机的设计与试验[J]. 农业工程学报, 2015, 31(8): 34-41. SONG Jiang, QIU Shenglan, WANG Xinzhong. Design and test on 4B-1200 type bulbus fritillariae ussuriensis medicinal material harvester[J]. Transactions of the CSAE, 2015, 31(8): 34-41.(in Chinese)
16 邬备, 王德成, 王光辉, 等. 小型自走式割草机仿形装置仿真分析与试验[J/OL].农业机械学报,2015,46(7):123-129. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150719&flag=1. DOI:10.6041/j.issn.1000-1298.2015.07.019. WU Bei,WANG Decheng,WANG Guanghui, et al. Simulation analysis and experiment of profiling device of small self-propelled mower[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(7):123-129.(in Chinese)
17 吕金庆, 田忠恩, 吴金娥, 等. 4U1Z 型振动式马铃薯挖掘机的设计与试验[J]. 农业工程学报, 2015, 31(12): 39-47. LÜ Jinqing, TIAN Zhongen, WU Jin’e, et al. Design and experiment on 4U1Z vibrating potato digger[J].Transactions of the CSAE, 2015, 31(12): 39-47. (in Chinese)
18 孙伟, 吴建民, 黄晓鹏, 等. 2BFM-5 型山地免耕播种机的设计与试验[J]. 农业工程学报, 2011, 27(11): 26-31. SUN Wei,WU Jianmin, HUANG Xiaopeng, et al. Design and field experiments of 2BFM-5 hilly no-tillage seeder[J]. Transactions of the CSAE, 2011, 27(11): 26-31. (in Chinese)
19 李建桥, 黄晗, 王颖, 等. 松软地面机器系统研究进展[J/OL]. 农业机械学报, 2015, 46(5): 306-320. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150544&flag=1. DOI:10.6041/j.issn.1000-1298.2015.05.044. LI Jianqiao, HUANG Han, WANG Ying, et al. Development on research of soft-terrain machine systems[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(5):306-320. (in Chinese)
20 王文斌, 林忠钦. 机械设计手册[M]. 北京: 机械工业出版社, 2004.
21 于希臣,孙占祥,郑家明,等.不同镇压方式对玉米生长发育及产量的影响[J].杂粮作物,2002,22(5):271-273. YU Xichen, SUN Zhanxiang, ZHENG Jiaming, et al. Effects of different methods of compaction on corn’s growth and production[J]. Rain Fed Crops, 2002, 22(5): 271-273. (in Chinese)
22 高连兴, 回子健, 董华山, 等. 三滚式小区育种花生脱壳机设计与试验[J/OL]. 农业机械学报,2016,47(7):159-165. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160722&flag=1. DOI:10.6041/j.issn.1000-1298.2016.07.022. GAO Lianxing, HUI Zijian, DONG Huashan, et al. Design and experiment of peanut sheller with three drums for plot breeding[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016,47(7):159-165. (in Chinese)
Design and Experiment of Bidirectional Profiling Press Device for Hilly Area
ZHAO Shuhong LIU Hongjun TAN Hewen YANG Yueqian ZHANG Xianmin
(CollegeofEngineering,NortheastAgriculturalUniversity,Harbin150030,China)
According to the deficiencies in uneven soil compaction and insufficient intensity in hilly region,the bidirectional profiling and strength adjustable press device was designed based on the hilly agricultural mechanical characteristics, which mainly consisted of profiling adjusting mechanism,strength adjusting mechanism and press wheel. The interaction model of soil and press wheel was established. Force analysis of press wheel was carried out to determine working process of press wheel. Force analysis of press device was carried out to determine the reasonable range of spring deformation (suppression of strength). The contrast test was done to verify the device performance of profiling, and the orthogonal tests were done to verify the hilly terrain repression wheel, soil interaction models along the correctness of draft force (activity-based costing) and ratio of root to shoot (crop growth state), and the factors affecting the changing rule of performance test. The effects of device under type of press wheel, intensity of the suppression and forward velocity were studied. In order to achieve the purpose of balancing the various indicators, the best combination was determined by using comprehensive weighted scoring method. The results of orthogonal tests of L9(34) showed that the primary sequence of factors was as following: press wheel, suppress strength and forward velocity, and the optimal combination was: rubber press wheel, spring deformation amount of 20 mm and forward velocity of 1 m/s. Under the conditions, the rate of draft force was 22.3 N, and the ratio of root to cap was 0.271. The result of contrast test showed that profiling press device was good in ensuring the uniformity of soil compaction. The result provided valuable information for the design of press wheel of planter.
hilly area; press device; profiling; design; experiment
10.6041/j.issn.1000-1298.2017.04.010
2016-08-11
2016-08-31
“十二五”国家科技支撑计划项目(2014BAD11B01)和黑龙江省重大科技招标项目(GA14B101-01)
赵淑红(1969—),女,教授,博士生导师,主要从事田间农业机械及力学特性研究,E-mail: shhzh091@sina.com
杨悦乾(1967—),男,研究员,主要从事保护性农业装备研究,E-mail: yangyueqian@126.com
S222.23
A
1000-1298(2017)04-0082-08
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
模具制造(2022年1期)2022-02-23
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19
哈尔滨轴承(2020年4期)2020-03-17
中国科技纵横(2018年14期)2018-08-30
浙江农林大学学报(2018年4期)2018-08-22
猪业科学(2018年4期)2018-05-19
现代农业科技(2017年16期)2017-09-22
新高考·高一物理(2016年10期)2017-07-07
汽车零部件(2014年9期)2014-09-18