
基于微惯性传感器的姿态捕捉系统设计
2017-06-05 15:17张泽宇南京师范大学电气与自动化工程学院江苏南京210042
自动化博览 2017年3期
★张泽宇(南京师范大学电气与自动化工程学院,江苏 南京 210042)
基于微惯性传感器的姿态捕捉系统设计
★张泽宇(南京师范大学电气与自动化工程学院,江苏 南京 210042)
在惯性导航系统中,对于动作捕捉时多个惯性传感器的数据实时传输及传输功耗问题,我们在文中提出了蓝牙数据转发装置的设计方案,并建立了惯性系统误差模型,提出了初始对准的方案;基于卡尔曼滤波解决了多传感器的信息融合问题;建立了人体三维棍状模型进行动作实时重现;提出了人体关节活动度与肢体姿态角的转换关系,并以此为姿态数据限幅。
动作捕捉;微惯性传感器;数据转发装置;三维棍状模型;卡尔曼滤波
1 前言
近年来随着微电子技术和惯性导航技术的发展,惯性传感器可实现对捕捉对象运动信息的检测,为动作信息的捕获带来新的基础工具和应用环境,其可以对相关部位姿态信息进行精确的测量与跟踪,具有结构设计简单和使用便捷等优点。所谓动作捕捉,是一种在肢体的相关位置架设传感器采集数据,再经计算机处理后能得到反映运动特点的数据、甚至能再现运动本身的技术,对于智能控制领域的发展具有极大的促进作用。
MEMS惯性传感器体积小、重量轻,将它佩戴在身上基本不会对肢体的正常动作产生影响。又由于惯性传感器测量的是加速度、角度及航向信息等,受环境影响很小,抗干扰能力比较好,鲁棒性强,因而近年来的研究重点侧重于将多个MEMS惯性传感器佩戴在人体上构成测量组件,并利用短距离无线通讯技术、姿态解算算法、人体三维模型构建等技术组成一个完整的动作捕捉系统。本文在基于微型惯性传感器技术的基础上,结合捷联式惯性导航和数据融合原理,设计了一种不受环境约束,抗干扰能力强的全姿态捕捉系统。

图1 基于微惯性传感器的姿态捕捉系统结构示意图
本文研究的基于微惯性传感器的捕捉系统结构如图1所示。该系统将惯性传感器组件佩戴在研究对象身上,并通过蓝牙将数据经蓝牙数据转发装置传至计算机;计算机接受到数据后进行数据解包,接着用四元数法进行姿态解算;最后再利用姿态数据构建人体模型进行动作再现。
2 动作捕捉系统的搭建
2.1 惯性传感器的设计
本系统选用了MEMS三轴加速度计来测量加速度、三轴陀螺仪来测量角速度、三轴地磁传感器来测量地磁场,以及气压高度计来测量高度,用共计10轴的数据来对肢体运动姿态进行实时跟踪和捕获,负责采集各部位运动过程中的原始数据,并进行数据的预处理。之后控制节点汇聚各个传感器节点的数据,通过传输把解算的姿态数据进行打包发送给上位机,通过对姿态数据进行进一步解析,以实现对虚拟模型关节的数据驱动,从而实现对真实部位姿态的捕捉和动态显示。但是加速度传感器存在数据抖动和偏移造成的误差,陀螺仪存在累积误差,地磁仪易受磁场干扰。如何最大程度减小这些误差是我们需要考虑的。
2.2 蓝牙数据转发装置的设计
为解决多个惯性传感器的实时数据传输问题,本系统设计了一个蓝牙数据转发装置。该装置通过MCU将多个传输进来的数据解包、识别后再打包、再通过一个蓝牙传输出去。为了使计算机能够识别出当前这一帧数据是来自哪个传感器,本系统对各个传感器进行了编码。
用此种方法来转发蓝牙数据,能同时转发的数据路数是有上限的,此上限由公式(1)决定:

式中,B为蓝牙的波特率,w为传输时的数据位个数,C为一帧内所有数据的字节数,f为传感器上传数据的频率,N为MCU可用的串口数,maxn为能同时转发的最大数据路数。
本系统采用STM32作为转发多路数据的MCU。由于所用的STM32仅有5个串口(4个接受数据,1个发送数据),我们采用5片STM32将串口扩展到17个(16个接收数据,1个发送数据),而这足够用来实现动作捕捉功能。
3 基于传感器的姿态分析算法
3.1 初始对准部分
在动作捕捉开始之前需要进行初始对准。初始对准分为粗对准与精对准两方面:粗对准阶段,依靠重力加速度g矢量和地球自转角速度ω矢量的测量值,直接估算从机体坐标系到导航坐标系的变化矩阵,计算得到载体水平姿态角和地理航向;精对准阶段,采用最优估计与补偿的方式。由于初始对准的时间较短,因而可采用捷联惯性导航系统的线性误差模型,并用线性卡尔曼滤波进行对准。惯性系统的误差模型由平台误差角模型、速度误差模型、定位误差和惯性传感器误差模型组成。
速度误差模型:

定位误差模型:

惯性传感器误差模型:

公式(2)~公式(6)中物理量的定义,以及各方程的建立过程详见参考文献[5]。
3.2 方向余弦的应用

从上面的公式我们可以得到方向余弦之间的一个基本关系式:

再次引入方向余弦阵的概念。对于两个不同的矢量基er与eb,即

3.5 卡尔曼滤波与信息融合
所谓的信息融合(也称数据融合)是一种对信息的多层次的、多方面的处理过程,这个过程是对多源数据进行融合以获得精确、完整的目标属性及状态。卡尔曼滤波理论将状态空间的概念与随机估计理论相结合,利用系统状态方程、观测方程及噪声的统计特征形成一套完整的滤波算法,是一种在高斯白噪声下对随机过程的最优估计。
相对于只适用于线性系统的经典卡尔曼滤波技术,扩展滤波(EKF)正在逐渐成为处理非线性系统状态及参数估计问题的标准方法。EKF将非线性过程通过一阶或二阶泰勒展开,向经典滤波问题转化。由于EKF在线性化时略去了高阶非线性信息,是一种次优估计,对于非线性程度不太高的系统如普通模型仍能获得较高的估计精度。状态估计对于多传感器信息融合系统的意义在于对目标过去的状态进行平滑处理,对现在的状态做出估计,同时对未来状态做出预测。在已知融合目标与融合结果的相对确切的数学模型的基础上选择扩展卡尔曼滤波理论作为信息融合技术的载体,建立信息融合算法。

4.2 位置信息解算与信息预处理
若上述角度均在相应的关节坐标系内加以修正后,除了肩关节、髋关节,人体关节活动度和其对应的移动臂姿态角的转换关系如式(7)所示。

式中,0φ、0θ和0γ分别是与某一关节相连的固定臂的三个姿态角。颈椎和肩关节的固定臂是胸部,肘关节的固定臂是前臂,膝关节的固定臂是大腿,髋关节和腰椎的固定臂是腰部。
肩关节、髋关节的活动度与其对应的移动臂姿态角的关系如式(8)所示。

由上述两式计算出的姿态角可以用来为解算出的肢体姿态角限幅。
本系统具体采用STM32作为惯性传感器和蓝牙数据转发装置的MCU,采用MATLAB作为实时显示模型动作的平台。实验时,在人体各处一共佩戴了11个惯性传感器。本系统显示的人的姿势与三维模型姿势对照图如图3所示,图中人具体的动作为双手叉腰的坐姿和双手垂下的站姿。
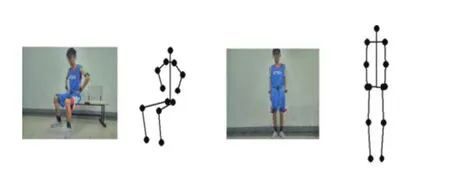
图3 人的姿势与系统显示的三维模型姿势对照图
5 结论
本文设计了一个基于微惯性测量组件的动作捕捉系统,结合动作捕捉的实际情况,针对多个惯性传感器的数据实时传输问题、传输功耗问题提出了蓝牙数据转发装置的设计方案。建立了惯性系统误差模型,并提出了初始对准的方案;建立了人体三维棍状简化模型进行动作实时再现;创新性地提出了人体关节活动度与肢体姿态角的转换关系,并以此为姿态数据限幅。从实验结果来看,本文提出的这些设计思路与方法,可以有效地解决基于微惯性组件的动作捕捉系统的相关问题,能够较好地实现动作捕捉的效果。AP
[1] ROETENBERG D, LUINGE H, SLYCKE P. XSENS MVN: full 6DOF human motion tracking using miniature inerial sensors[J]. Xsens Motion Technologies BV, Tech. Rep, 2009.
[2] 汪俊. 基于惯性传感单元的动作捕捉系统研究与设计[D]. 合肥: 中国科学技术大学, 2015.
[3] 徐昺. 基于MEMS传感器与Zigbee网络的人体动作捕捉系统的设计与实现[D]. 成都: 电子科技大学, 2013.
[4] 赵正旭, 戴欢, 赵文彬, 等. 基于惯性动作捕捉的人体运动姿态模拟[J]. 计算机工程, 2012, 38 ( 5 ) : 5 - 8.
[5] 陈湾湾, 陈智刚, 付建平. MEMS 微型惯性测量组合的标定[J]. 仪表技术与传感器, 2014, ( 12 ) : 36 - 38.
[6] 郑淑孟. 基于MEMS惯性传感器的人体姿态和位移检测[D]. 暨南大学, 2015.
[7] 蹇彪. 基于惯性传感器的人体运动姿态三维重构[D]. 哈尔滨工程大学, 2013.
Design of Motion Capture System Based on MEMS Inertial Measurement Units
In this article, we focus on the problem of real-time data transmission of multiple inertial sensors in inertial navigation system (INS). To achieve this goal, we design a bluetooth dataforwarding device and construct an error model of inertial system. Then, an initial alignment method is proposed. Moreover, we settle the problem of multi-sensor information fusion based on Kalman filtering. The motion reconstruction is carried out based on a simplified 3D point-stick model of human body. In addition, we build the conversion relationship between motion range of human joints and body attitude angles, and use this relationship to limit the range of body attitude angles.
Motion capture; Micro inertial sensors; Data forwarding device; 3D point-stick model; Kalman filtering
B
1003-0492(2017)03-0085-04
TP212.6
张泽宇(1995-),男,河北石家庄人,现就读于南京师范大学电气与自动化工程学院本科,研究方向为传感器及相关循迹导航平台开发。
猜你喜欢
工业设计(2022年7期)2022-08-12
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
家庭影院技术(2018年10期)2018-11-02
专用汽车(2018年10期)2018-11-02
当代陕西(2018年12期)2018-08-04
家庭影院技术(2018年3期)2018-05-09
探测与控制学报(2015年4期)2015-12-15
弹箭与制导学报(2015年1期)2015-03-11
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
