动态恶劣天气下的多目标多机改航路径规划
2017-06-05 14:16齐雁楠王兴隆李庆阳
中国民航大学学报 2017年2期
齐雁楠,王兴隆,李庆阳
(1.中国民航大学空中交通管理学院,天津 300300;2.中国民航西北空管局培训中心,西安 710082)
动态恶劣天气下的多目标多机改航路径规划
齐雁楠1,王兴隆1,李庆阳2
(1.中国民航大学空中交通管理学院,天津 300300;2.中国民航西北空管局培训中心,西安 710082)
针对恶劣天气影响多架航空器正常运行的问题,提出了多目标的多机改航路径规划方法。首先构建了基于网格的改航环境,考虑了天气的变化和航空器的运动,建立了转弯次数最少、航迹长度最短、所需空域最小的多目标优化模型,并采用改进遗传算法进行求解。以西安管制空域为实例,用实际数据验证了方法的有效性。结果表明:本文规划的多机改航路径,减少了航班总延误时间,保证了安全间隔且效率较高。
航空运输;改航路径规划;多目标优化;多航空器;动态恶劣天气
通过实施改航策略,实现在恶劣天气下安全、持续飞行,已成为国内外民航领域的研究热点。Krozel等[1]提出了基于可视图和权重的改航路径规划方法;Sridhar等[2]研究了基于多边形的改航路径规划方法;Krozel等[3]研究了基于标准进离场程序的改航路径规划方法;Balen[4]将自由飞行的思想应用于航班改航路径规划,提出了基于自由飞行的改航路径规划方法;宋柯[5]在Bertsimas和Patterson建立的针对改航策略数学模型的基础上,应用A*算法在已有航路网络中搜索改航路径;高政等[6]对动态空域下的实时改航策略进行研究,并提出了基于椭圆边界的改航路径规划方法;徐肖豪等[7-9]考虑了管制规则等多个限制因素,提出了基于人工势场算法的航班改航路径规划方法,实现了改航路径的快速规划。
但上述研究只考虑了单航空器、静态天气条件下改航情况,实际运行中天气是变化的,恶劣天气会影响多个航空器的运行。本文采用改进遗传算法研究了动态恶劣天气下多目标多架航空器的改航问题。
1 改航环境构建
1.1 改航范围
为了不影响其他未受影响区域飞行的航空器,改航应尽可能少占用高度层[4-5]。本文改航规划不考虑改变高度,建立适合多航空器改航的基本环境,如图1所示。
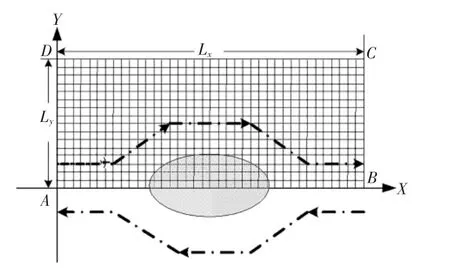
图1 改航环境Fig.1 Rerouting environment
图1中,X轴为原航路,天气分布于X轴正方向,为了限制改航距离,Lx为X轴方向改航最大范围,Ly为Y轴方向改航最大范围,Lx和Ly的取值与绕飞天气的尺寸有关。
按照大多数航空器的尺寸,将改航区域空间划分为若干λx×λy的网格,λx和λy为航空器平均横向、纵向尺寸。为了保证间隔,使用航空器周围一定数量的网格作为安全区,即航空器的安全网格不可进入其他航空器的安全区以及天气影响范围。
为了保证得到整数数量的空间网格引入取整符号,最大绕飞区域边界点A、B、C、D坐标为
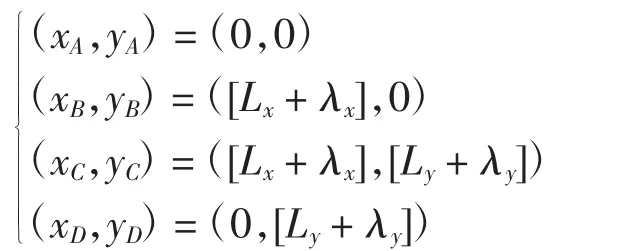
其中,[]表示取整符号,对于任意i行j列的网格坐标表示为

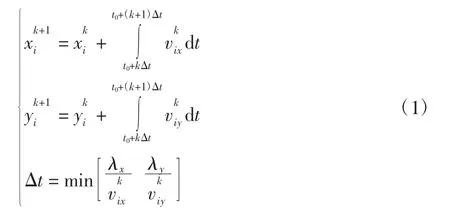
1.2 航空器运动建模
以网格为最小的运动单位,以k来统计航空器在网格间的移动次数。用i、j表示所在网格的行号和列号,只要i或j发生一次变化,则k+1,那么航空器所在位置pk表示第k次变动网格后占据的空域网格,同理可知其在第k-1、k+1次的变动分别占据pk-1和pk+1且其一定不重复。任意一架航空器i第k次运动时的瞬时速度为,N为航空器总架次,i=1,2,…,N,则航空器运动模型为
1.3 恶劣天气范围的动态描述
恶劣天气的发展与消散都是从云团边界开始,首先确定各独立云团的几何中心Oi(雷达回波强度超过41 dBZ的区域),使用一个椭圆作为独立云团主范围。围绕椭圆以正北为起始方向,45°为步长确定椭圆上的点,以这些点为圆心确定若干小圆覆盖整个云团,独立云团i主范围外各个小圆的半径为rij,圆心为Oij,外围小圆范围应包括雷达回波超过41 dBZ的区域。
天气发展有一定规律,最初是发展膨胀,随着湿度、空气对流等变化发展到鼎盛后逐渐衰退。因此天气不仅移动,边界也会扩张与收缩,因此云团边界上小圆变化的速度和距离为和,即
其中:vc0、ac为初始时刻云团边界小圆移动速度和加速度,ac为正、0和负表示边界的膨胀、静止和收缩。本文利用小圆半径的变化来描述天气的变化趋势,则t时刻,第i个云团的第j个小圆的半径为

2 多目标改航路径优化模型
改航路径必须保证飞行安全,同时不影响空域利用率且兼顾运行效率,因此从可操作性、影响空域范围、飞行效率3方面建立路径优化模型。
2.1 可操作性
假设N架航空器改航,用航空器转弯次数表示可操作性,根据1.2中定义的航空器位置,建立航向改变次数(n)最少的目标函数为

其中
2.2 空域使用范围
为了避免影响其他空域的航空器,改航使用空域尽可能小,确定改航面积(S)最小目标函数为

则第i架航空器改航所需空域面积Si为

2.3 飞行效率
确定目标函数为航迹路线总长度(L)最小

在减少空域利用的同时还考虑不同航空器间、航空器与天气范围之间的安全间隔,该间隔根据1.2中模型的网格移动时间,任意εΔt时间后不同航空器间应始终满足
3 模型求解
非支配排序遗传算法(NSGA2)是目前求解多目标模型较好的方法,本文使用该算法对模型进行求解得到了良好的结果。
3.1 改航路径编码方法
改航时,航空器通常由改航点开始,实施一定机动飞行以避开危险天气,至无影响再归航至原航路。航空器机动转弯时需要一定的稳定距离才能稳定到目标航迹上。在编码时,为了满足最小转弯距离的要求且避免编码过长,将图1划设的网格组合为大网格,规定航空器转弯发生在大网格起始位置,转弯角度小于90°。根据大网格数量n和航空器数量m设置编码长度为m(n-1),使用转弯角度A作为编码值,A∈[-90°,90°],A为负数代表向左转弯,A为正数代表向右转弯。
3.2 遗传算子
使用锦标赛算法选取最前的N个个体形成新种群,采用单点交叉方式。
随机设置交叉点,依照交叉概率pc交换两个体部分染色体形成新个体。NSGA2算法在整个遗传操作过程中要求有很强的多样性,因此选择pc=0.8。由于要满足无冲突条件,将新个体根据航空器运行模型和时间参数进行解码,判断冲突情况,如果有冲突则删除当前个体重新进行交叉操作。
采用基本变异操作,随机选择个体按变异概率pm改变基因位编码,根据改航策略将新个体解码,判断约束满足情况,如有冲突则删除当前个体,重新进行变异操作。
4 仿真验证
选取西安区域内H14航路为例验证多机改航方法的有效性。绕飞天气间隔标准Csep=10 km,西安区域执行雷达间隔18 km,设λx和λy为100 m。根据2015年4月26日的天气预报,19:00—20:30西安区域有雷暴,影响H14航路JIG—VISIN—HO段,如图2和图3所示。
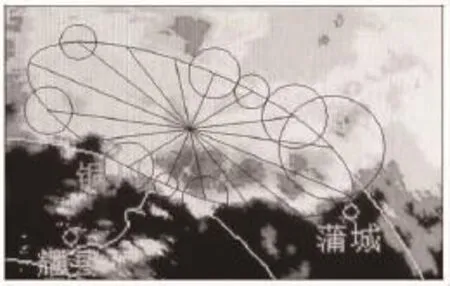
图2 云团范围Fig.2 Cloud scope
提取初始天气影响范围:初始状态下雷暴中心坐标为(105.17,-6.43),主范围长半轴38.4 km,短半轴13.6 km,高度1 100~11 500 m,雷暴向东北方向移动。根据气象雷达预测,雷暴运动速度vwx=14.34 m/s,vwy=6.34 m/s。在JIG—HO之间建立直角坐标系并划分网格,坐标原点为JIG点,HO方向为+X方向,网格规模为100 m×100 m,如图3所示。为了证明模型的效果及适用性,将原受影响航班加密进行试验,如表1所示。
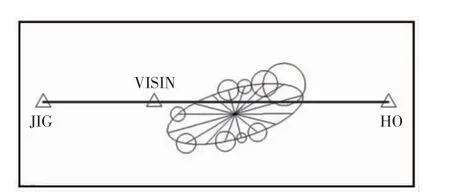
图3 天气初始影响范围Fig.3 Initial influencial scope of weather
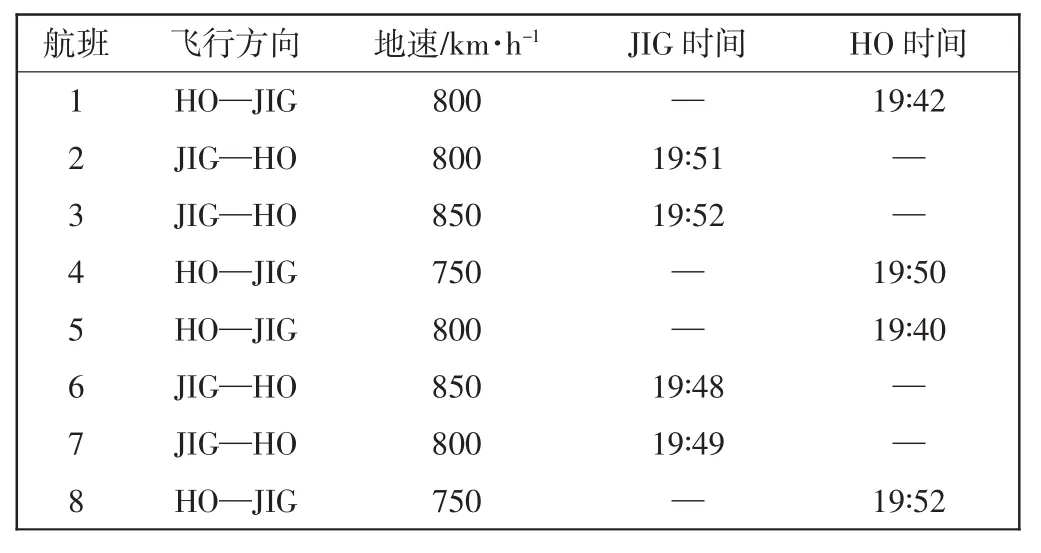
表1 通过雷雨范围的航班Tab.1 Flights fly through convection area
根据气象雷达前两次回波的数据,得出各方向上小圆半径的变化。由于天气是向东北方向移动,因此改航选在航路南侧进行。
应用NSGA2算法进行路径求解,种群规模N= 80,编码长度19×8,交叉概率pc=0.8,变异概率pm= 0.2,最大进化代数100,选取3个最优解,如图4和表2所示。
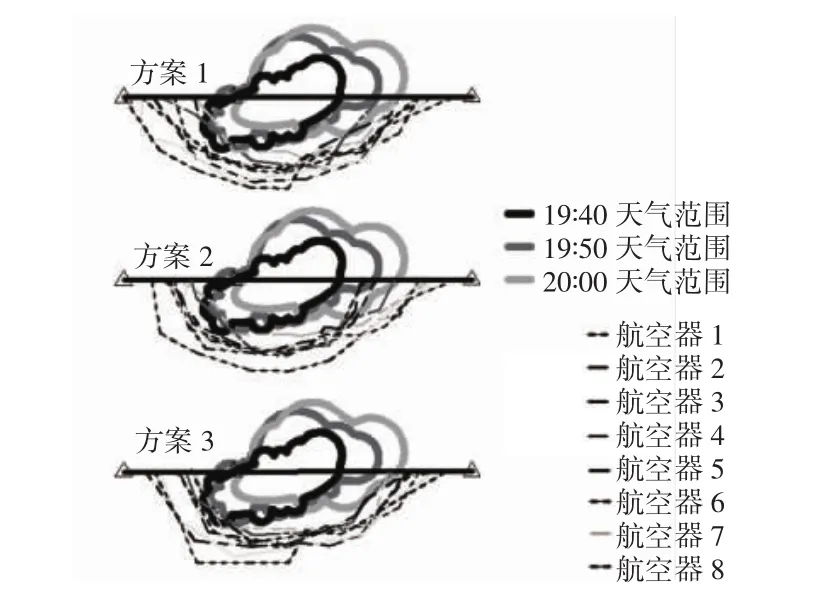
图4 改航路径规划方案Fig.4 Rerouting trajectory plan
从表2中可以看出,3个方案中航空器与云团间的距离满足最小10 km的间隔,说明模型合理、正确,云团范围的预测准确度较高,航空器间距离均在12.5 km以内,空域利用率较高。方案1的转弯次数少,飞行最便捷;方案2改航使用空域范围小,对其他航空器的影响最小;方案3飞行路径最短(平均航迹长度增加15%)、最节油。3个方案充分考虑了不同方面的要求,平均延误时间分别为4.5 min、3.8 min和4.5 min,均在可接受范围内。
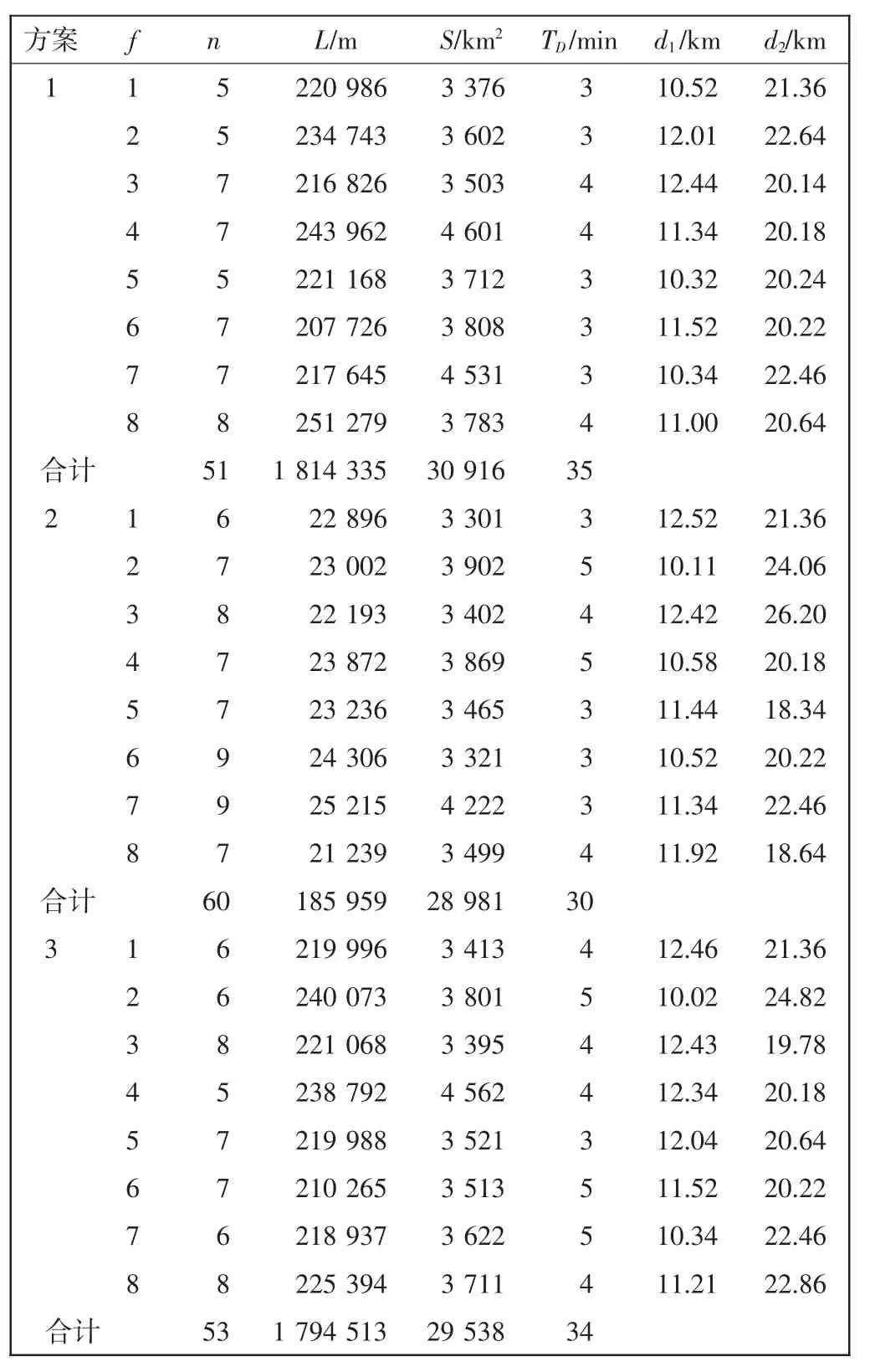
表2 路径规划结果分析Tab.2 Analysis of rerouting trajectory plan
5 结语
多航空器路径规划是改航策略的关键环节,与以往的单架航空器的改航问题具有明显的不同。本文建立了多目标多航空器改航模型,同时,考虑了航空器的运动和天气的移动、变化,采用NSGA2算法进行了模型求解,解决了多航空器改航冲突,提高了动态天气变化条件下改航的安全性。仿真结果表明,生成的多机改航路径的航迹距离、转弯次数及空域使用面积均在合理范围内,减小航班延误的同时保证安全间隔标准,方法有效且适用性强。
[1]KROZEL J,WEIDNER T,HUNTER G.Terminal Area Guidance Incorporating Heavy Weather[C]//AIAA Guidance,Navigation,and Control Conference,New Orleans,LA,1997:411-421.
[2]SRIDHAR B,CHATTERJI G B,GRABBE S,et al.Integration of Traffic Flow Management Decisions[C]//AIAA Guidance,Navigation,and Control Conference,Monterey,Cal,2002:1-9.
[3]KROZEL J,PENNY S,PETER J,et al.Automated route generation for avoiding deterministic weather in transition airspace[J].Journal of Guidance,Control,and Dynamics,2007,30(1):144-153.
[4]BALEN C H,BIL C.Optimal Re-Routing of Aircraft Around Closed Airspace in Free Flight[C]//AIAA Modeling and Simulation Technologies Conference,Honolulu,HI,2008:1-10.
[5]宋 柯.空中交通流量管理改航策略初步研究[D].南京:南京航空航天大学,2002.
[6]高 政,胡明华.动态空域下的实时改航策略[C]//第四届中国智能交通年会.青岛,2008:412-417.
[7]徐肖豪,李成功.基于人工势场算法的改航路径规划[J].交通运输工程学报,2009,9(6):64-68.
[8]李 雄,徐肖豪,赵嶷飞,等.散点状分布危险天气区域下的航班改航路径规划[J].航空学报,2009(12):2342-2347.
[9]王兴隆,徐肖豪,冯江然.基于改进人工势场法的多机改航路径规划[J].飞行力学,2013(8):381-384.
(责任编辑:孟 欣)
Multi-aircraft rerouting path planning under dynamic severe weather condition
QI Yannan1,WANG Xinglong1,LI Qingyang2
(1.College of Air Traffic Management,CAUC,Tianjin 300300,China; 2.Training Centre,China Northwest ATM Bureau,Xi′an 710082,China)
Multi-objective rerouting path planning method is put forward to solve multi-aircraft disturbance caused by severe weather.Rerouting environment based on gird is built at first,changes of weather and aircraft maneuver are considered.Then multi-objective optimization model is proposed with fewer turn,minimum length of trajectory and minimum rerouting area as its targets.Genetic algorithm is improved to solve the model.Finally, Xi’an control area is studied to verify the method effectiveness with actual flight data.Results show that the method used to get multi-aircraft trajectory is effective to reduce delay and can meet the demands of separation.
air transportation;rerouting path planning;multi-objective optimization;multi-aircraft;dynamic severe weather
V355
A
1674-5590(2017)02-0001-04
2016-09-27;
2016-11-03
国家自然科学基金项目(61571441,U1333116);国家重点研发计划(2016YFB0502405);中央高校基本科研业务费专项(ZXH12012M002,3122014D036)
齐雁楠(1981—),女,宁夏石嘴山人,讲师,硕士,研究方向为空域规划.
猜你喜欢
西华大学学报(自然科学版)(2022年2期)2022-03-17
少先队活动(2021年3期)2021-12-04
兵工学报(2021年5期)2021-06-24
军民两用技术与产品(2021年10期)2021-03-16
科技视界(2020年8期)2020-05-18
北京航空航天大学学报(2017年4期)2017-11-23
润·文摘(2016年4期)2016-07-13
太空探索(2016年3期)2016-07-12
太空探索(2016年8期)2016-07-10
海峡科技与产业(2016年3期)2016-05-17