航天某产品仰角校准装置及其控制系统设计
2017-06-01 12:47周愿愿武丽丽吴远峰
航天制造技术 2017年2期
何 军 平 昊 周愿愿 武丽丽 姜 恒 陈 浩 吴远峰
航天某产品仰角校准装置及其控制系统设计
何 军 平 昊 周愿愿 武丽丽 姜 恒 陈 浩 吴远峰
(上海航天精密机械研究所,上海 201600)
为给航天产品在校准过程中提供一定的仰角,设计一套仰角校准装置。该装置由PLC、触摸屏以及防爆伺服电机组成。通过触摸屏实时监控状态信息,PLC控制伺服驱动器,在高精确传感器的控制下,完成仰角的精确控制。结果表明:该装置精度高、可靠性好、工作效率高,达到了预期设计的目的。
校准装置;仰角;高精度

1 引言
校准是实现对航天产品相关精度进行校调和补偿的手段[1]。在校准测试过程中,需要外部装置为产品提供一定的仰角,来保证测试的准确性。为了满足产品批量生产的需求,需设计一套校准装置。该设备主要校准台面、目标源、地面气源等辅助设备,其中校准台面主要为产品提供支撑、调校的平台;目标源是产品校准时瞄准、指示的目标源。
2 校准装置总体设计
仰角校准装置主要由底座、防爆交流伺服电机模块、电气控制系统、产品支撑、目标装置组成。在底座下方安装防爆伺服电机,通过减速结构带动丝杠和连杆组合运动,使活动支架呈水平状态或呈现15°仰角状态。航天产品通过操作盒控制电机运动,使装置尾端按照设定的速度平稳下降,直至支架与底部限位条接触并保持位置,此时装置平面与水平呈15°仰角,在该状态下完成航天的校准试验。装载位(水平装载状态)和工作位(装置平面与水平呈15°仰角状态)是该装置的两种主要的状态,如图1所示。

图1 校准装置的两种状态
3 校准装置部分结构设计
校准装置的机械部分主要包括底座、机械运动机构、产品支撑结构、目标系统四个部分。
3.1 底座设计
校准装置底座用于安装电机、传动机构等。整个底座主要由基座、轴承座组件、运动支架、限位条等组成,如图2所示。其中基座采用型钢焊接结构,具有较高的受压能力和吸引地面振动的能力。基座的右侧底面安装限位块用以保证工作时的角度。内侧两平面用于运动支架的左右限位。运动支架通过丝杠机构带动升降,并在工作位和装载位置安装有定位传感器确保运动支架的上下运动。

图2 校准装置底座示意图
3.2 机械运动机构设计
丝杠组件、连杆和滑轨是实现整个系统运动的机构,三者连成一体,通过PLC程序控制,在电机的带动下确保运动支架在-15°~0°之间的转动。
丝杠组件采用丝杠、滑轨组合结构。该结构将力分散分布在丝杠和导轨上,避免丝杠应受力过大而发生变形。
3.3 产品支撑结构设计
本校准装置支撑机构用于航天产品的支持定位,设计采用导向板、托板、润滑板等。

图3 航天产品支撑结构示意图
3.4 目标装置设计
目标装置共有11目标源,为了满足光源平面垂直于产品轴线的要求,目标装置的设计采用了角度块加十字微调滑台的形式,如图4所示,其中十字微调滑台是为了方便在测量调校过程中对光源的精确微调。

图4 目标装置结构
4 校准装置控制系统设计
4.1 控制系统总体设计
校准装置的控制是以欧姆龙PLC(型号为CP1H-XA40 DT-D)作为整个系统的控制核心[2],以步科触摸屏(型号为MT4300CE)作为系统的人机交互界面。整个系统的硬件包括美国Parker公司Ex系列防爆交流伺服电机、伺服驱动器、防爆组件、制动电阻、高精密限位接触开关和光电开关、空气开关、手持式控制盒、直流线圈接触器、保险丝。
其中高精密限位接触开关安装在底部的限位条上,用于保证工作角度处于-15°,光电开关安装在水平位置用于保证转动支架处于水平位置,便于产品的装卸。控制系统的总体设计方案如图5所示。

图5 电气总体控制系统设计
4.2 控制系统硬件电路设计
控制系统的电路主要给伺服驱动器、开关电源供电和完成传感器信号的传递,由光电传感器、空气开关、熔断器、接触器、继电器、空气开关等组成,电路示意图如图6所示。

图6 控制系统电路
4.3 控制系统软件设计
整个校准装置的控制系统软件包括:PLC、触摸屏程序以及伺服电机驱动器的控制参数设置。PLC程序完成对整个校准工艺的控制,触摸屏界面作为人机交互界面实时显示工艺参数,伺服电机的控制参数(如加减速时间、制动电阻参数等)会根据负载的特性提前在电机驱动器里设置好[3]。
4.3.1 PLC和触摸屏程序设计
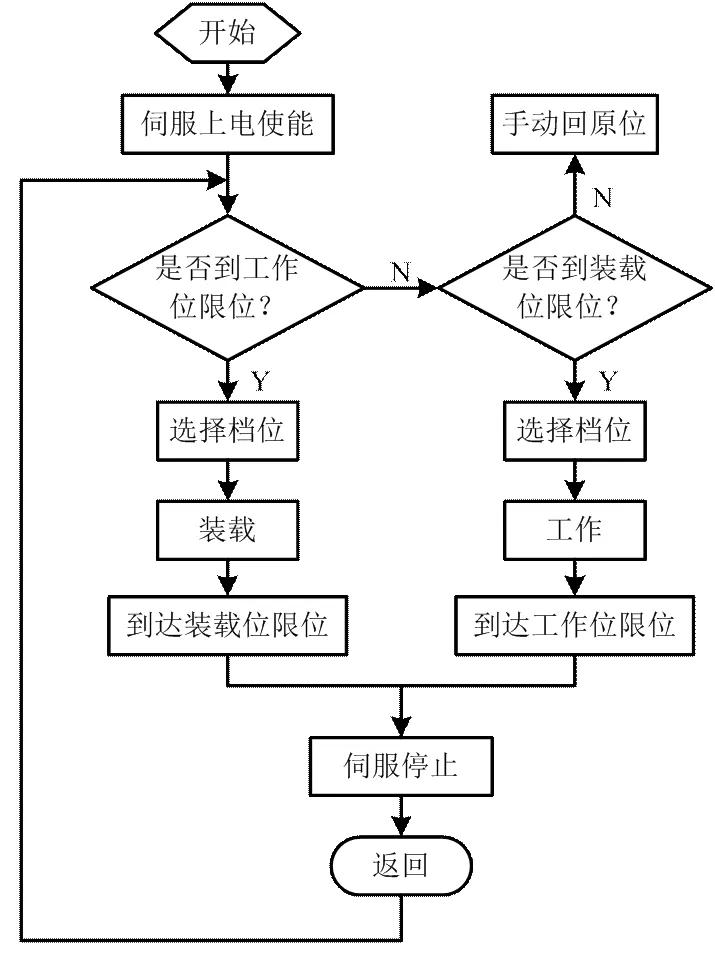
图7 PLC控制流程图
a. PLC程序设计
仰角装置自始至终工作在两种状态:工作位和装载位。若装置既不在工作位也不在装载位,则手动控制电机回原位。系统的PLC控制流程图如图7所示。
b. 触摸屏程序设计
触摸屏界面作为人机交互界面实时显示工艺参数,可以实现电机速度的调节、实时显示、传感器状态显示、权限管理、用户登入、电机点动操作等功能,触摸屏界面包括试验操作界面、参数设置界面、状态监控界面等[4]。
4.3.2 PLC接口定义
如表1,接口定义表示PLC的I/O分配,伺服驱动器控制口和触摸屏界面开关按钮地址分别与PLC的内部寄存器进行数据链接。

表1 PLC输入输出信号地址分配表
5 结果分析
5.1 校准装置与目标之间几何空间位置检测
用4台经纬仪组成空间测量系统,逐条对相关坐标进行测量。理论要求产品光轴姿态同轴度不大于4′,折算为相对物理偏差为:15000×tan(4/60)=17.45 mm;其它角度的允许偏离公差为在0.05°内,折算物理偏差为:15000×tan0.05°=13.08 mm。
由于产品光轴无法直接测量,通过换算到前龙门架后端面后就可得到,15000+(497.3-341-15)-74=15067.3mm。
根据计算结果,校准装置与靶标之间相互几何空间位置检测指标要求见表2。

表2 校准装置与靶标之间相互几何空间位置测量值
5.2 校准装置重复性试验
利用不同产品对校准装置进行重复性测试,当产品由装载位到工作位,伺服电机需运行3min,然后通过采集软件对产品关键部位和目标之间进行数据采集,对比采集数据和理论数据验证设备的重复定位精度是否满足要求;采集完成后产品由工作位到装载位,同样电机需运行3min,整个试验完成仅需20min左右。
从表2可以看出,校准装置与目标之间的空间位置满足设计指标的要求,同时由测量软件得出的采集数据也符合产品的校准要求。
6 结束语
a. 由于产品的特殊性,整个校准装置采用防爆控制系统设计,充分考虑到产品的安全性,结构设计合理,人机交互操作方便,状态信息实时显示。
b. 该装置能够为航天产品提供精确的仰角,重复性定位能够满足相关指标的要求,为航天产品的批量生产提供了技术支撑。
1 薛长利,张名毅,丁勤,等. 测量不确定度在国内航天领域的应用现状[J]. 航天器环境工程,2013,12(6):652~656
2 许树业,沈林勇. 基于HostLink(FINS)协议的计算机与CP1H串行通信实现[J]. 工业控制计算机,2016,29(2):13~14
3 娄宇翔. 基于PLC与伺服系统控制的电子凸轮应用研究[D]. 大连理工大学,2014,(12):33~42
4 孙立杰,冯清秀,汤漾平. 基于PLC的数控齿条磨齿机控制系统[J]. 机电工程,2010,10(27):75~76
Design of Elevation Calibration Device for Spaceflight Product and Control System
He Jun Ping Hao Zhou Yuanyuan Wu Lili Jiang Heng Chen Hao Wu Yuanfeng
(Shanghai Spaceflight Precision Machinery Institute, Shanghai 201600)
In order to provide a certain angle of elevation for spaceflight products calibration, the device of elevation calibration is designed. This set is composed of PLC, SCADA and explosion-proof servo motor. With the help of touch screen monitoring real-time status and PLC controlling servo driver, the set can accomplish accurate control over the angle under the control of high-accuracy sensor. It turns out that the set has met the expectation with high accuracy, good reliability and high efficiency.
calibration device;elevation;high precision
何军(1987-),硕士,控制工程专业;研究方向:数控机床电气控制及非标设备集成。
2017-04-10
猜你喜欢
机床与液压(2022年8期)2022-09-19
发明与创新·中学生(2020年1期)2020-08-03
汽车实用技术(2020年4期)2020-04-10
初中生世界·九年级(2020年2期)2020-04-10
上海航天(2018年1期)2018-03-23
汽车维修技师(2017年6期)2017-11-18
科技视界(2016年15期)2016-06-30
燕山大学学报(2015年4期)2015-12-25
文学港(2011年3期)2011-11-21
红领巾·成长(2009年8期)2009-01-12