汽机主控指令突变原因分析及处理
2017-05-24 03:07李新建
发电技术 2017年2期
李新建
(华电潍坊发电有限公司,山东潍坊261204)
汽机主控指令突变原因分析及处理
李新建
(华电潍坊发电有限公司,山东潍坊261204)
介绍了某电厂采用XDC-800DCS系统,一次调频同源改造闭锁汽机主控指令增减时,造成汽机主控指令突变,通过对现场控制回路的仿真分析,提出了逻辑优化措施,为同类型DCS系统设计控制回路闭锁增减提供借鉴。
一次调频;EPID;DEH;CCS;闭锁;仿真;扫描周期
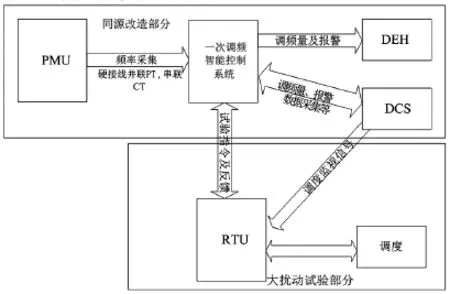
图1 一次调频同源改造系统图
0 引言
为了提高一次调频响应速度及控制精度,对机组一次调频系统进行信号同源及大扰动测试改造(如图1所示)。增设一套N X-PFR型一次调频智能控制装置,用于机端频率采一次调频运算、大扰动测试控制。为确保CCS协调方式下一次调频动作合格率,在负荷控制逻辑中,根据一次调集、频智能控制装置的输入信号状态,通过修改EPID高(低)限制,增加闭锁增减条件。其次,通过全面分析逻辑过程,重新设置功能参数,以及仿真分析,成功避免了汽机主控指令的突变,从而使得机组更加稳定可靠地运行,同时为同类型的D CS系统设计控制回路优化提供了可行方案。
1 机组概况
某发电厂为2300M W机组,DCS控制系统采用某公司X DC-800系统,#2机组CCS协调控制系统采用D EB/400直接能量平衡方式,该方式是以锅炉跟随为基础的协调控制系统,可获得较好的电功率相应性能,机组的功率和汽压都进行自动控制,由汽轮机机侧对功率进行闭环控制[1]。一次调频量根据电网的要求对F(X)曲线函数(见表1)进行设置。

表1 一次调频转速-负荷修正量
汽机主控EPID模块(见表2)中,比例放大系数Kp=1.2,积分时间Ti=12,微分时间Td=0.0,偏差输入E前标幺系数为0.33。

表2 E P ID标记描述[2]
2 汽机调门突关经过
调取2016年11月29汽机调门经过趋势(如图2所示),21:25:03,#2机组AG C模式运行,目标负荷给定值253.08M W,机组负荷253.48M W,主汽压力14.84M Pa,汽机主控指令81.42%,汽机负荷参考82.10%。
21:25:05,一次调频动作,一次调频量最大为-2.70M W,目标负荷给定值252.83M W,机组负荷250.81M W,汽机主控指令80.45%,汽机负荷参考81.87%;21:25:10一次调频结束,目标负荷给定值250.80M W,机组负荷252.78M W,汽机主控指令64.78%,汽机负荷参考81.09%。
21:25:17,一次调频动作,一次调频量最大为-2.52M W,目标负荷给定值251.33M W,机组负荷251.70M W,汽机主控指令64.67%,汽机负荷参考80.01%;21:25:20,一次调频结束,目标负荷给定值249.97M W,机组负荷250.88M W,汽机主控指令59.85%,汽机负荷参考79.86%,汽机主控切手动,CCS(Coordinate Control System)协调方式解除,A GC切除自动控制。
21:26:49,机组负荷200.42M W,汽机主控指令61.25%,汽机负荷参考66.10%;运行人员手动增加汽机主控指令,21:26:56,机组负荷196.45M W,主汽压力16.36M Pa,汽机主控指令68.25%,汽机负荷参考65.39%。
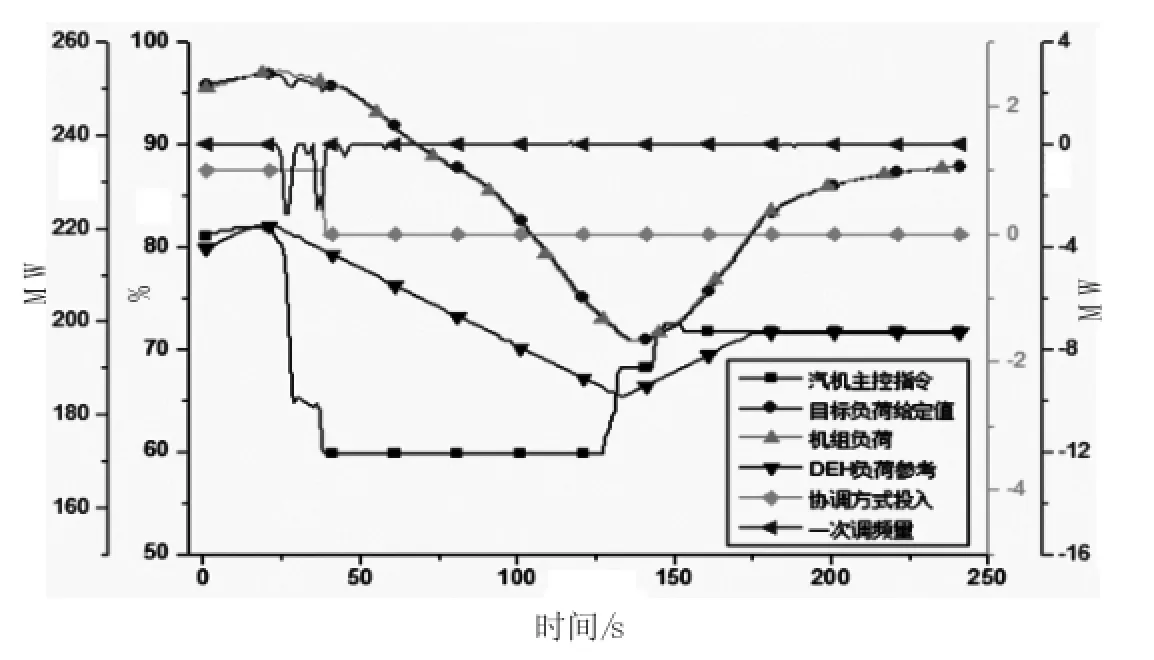
图2 汽机主控指令大幅度突变
3 汽机调门突关原因分析
整个过程中,汽机主控指令由81.42%下降到59.85%,21:25:20,汽机负荷参考79.86%,汽机主控切手动,但仍在D EH遥控方式,造成汽机调门继续关闭,最小到65.39%。汽机主控切手动首出为汽机主控指令与DEH负荷参考偏差大于20%,DEH侧CCS汽机指令与流量设定值偏差为19.98,DEH侧C CS汽机指令为三选中信号,由于传递速度问题,造成两侧数值有差异,没有切除AD S方式,CCS汽机指令为65.39%,流量设定值以1%/s的速度递减。
从图3中①回路分析,调取D CS历史数据,#2一次调频动作负荷叠加量(来自信号同源装置),在21:25:05,一次调频动作,一次调频量最大为-2.70M W,该值同步叠加上A GC指令生成目标负荷回路,整个过程中负荷设定值与功率值最大偏差为(250.43-253.06)-2.63M W。通过计算,该叠加量应对汽机主控输出造成约-1%左右的变化,因此一次调频动作负荷叠加量、AG C指令和机组功率信号不是汽机主控指令快速大幅度降低的原因。
从图3中②汽机主控前馈回路分析,前馈回路目标负荷指令无突变或大幅变化情况,前馈回路也不会造成汽机主控指令快速大幅度降低。
从图3中③一次调频闭锁汽机回路分析,#2机组在一次调频同源改造前CCS方式投入一直都正常,没有出现过汽机主控指令突变的现象。而此次投入CCS协调方式时,机组一次调频同源装置是在投入状态的,而且当时的调频动作时,汽机主控指令突变与D EH一次调频回路有关[3]。
通过调取汽机指令突变曲线图(如图4所示),发现多次出现汽机主控指令快速大幅降低的情况,在每次快速降低时,一次调频同源装置闭锁增为真。初步判断一次调频同源装置闭锁信号是触发汽机高调门指令大幅突变的原因。
对汽机主控指令突变曲线图进行局部放大(如图5所示)和调取11月26日-28日闭锁增信号发出时,汽机高调门指令、目标负荷等历史数据进行分析(见表3)。
对10项数据分析,可得出调门大幅波动时有2项共性条件满足:1)闭锁增信号触发(信号为1),汽机主控PID高限制动作;2)机组负荷>目标负荷。
根据以上共性对控制回路进行仿真实验(如图5所示)。

图3 汽机主控控制回路

图4 汽机主控指令突变

图5 汽机主控指令小幅度突变局部放大

表3 汽机主控指令突变时参数
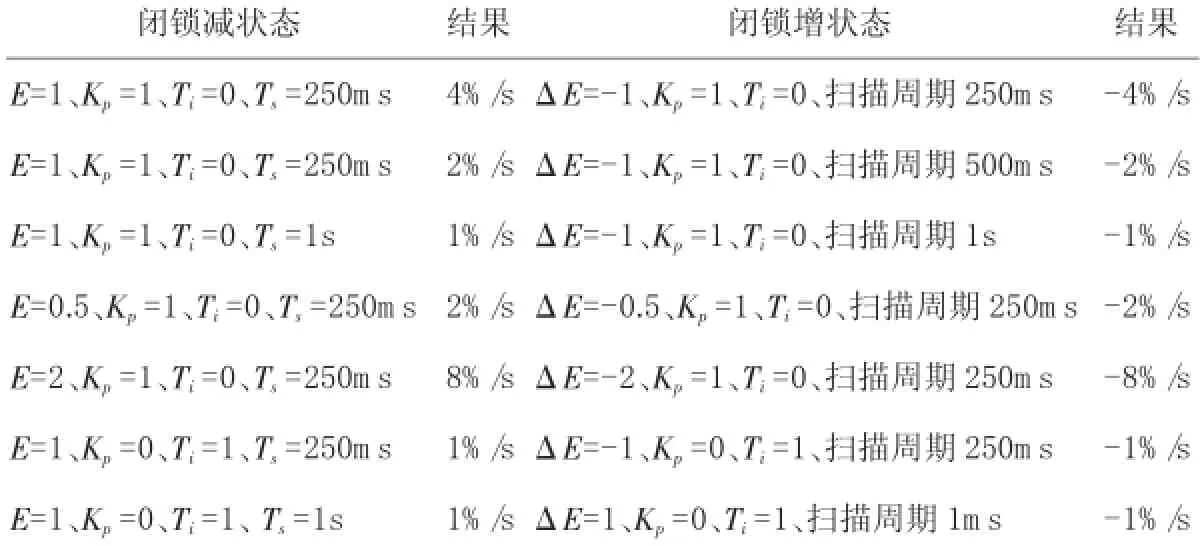
表4 闭锁信号为真时EP ID仿真数据
(1)将汽机主控PID投入自动;
(2)强制闭锁增或者闭锁减信号为1。
汽机主控PID高限制由100%或者0%切换为PID当前输出值。
X DC-800组态软件PID理论输出值:

式中Kp—比例增益(PGA IN);
Ti—积分时间(IN TG);
Kd—微分增益(D GA IN);
Td—微分时间(D R A T);
E(s)—设定值与实际值的偏差;
S—传递函数;
FF(s)—前馈量。
分别改变PID输入端偏差E、比例放大系数Kp、积分时间Ti和组态页扫描周期Ts,从表4得出,闭锁增时:

式中YL—输出下限。
闭锁减时:

式中YH—输出上限。
与#2机组汽机主控指令突变情况基本一致。
考虑到在DCS系统中页面的执行周期是指页面两次执行计算之间的间隔,它从50-60000m s不等,考虑功能块的时序对计算结果的影响,分别从倒时序和正时序两种情况进行逻辑仿真,得出如表4相同的数值,判断不是时序原因造成的。
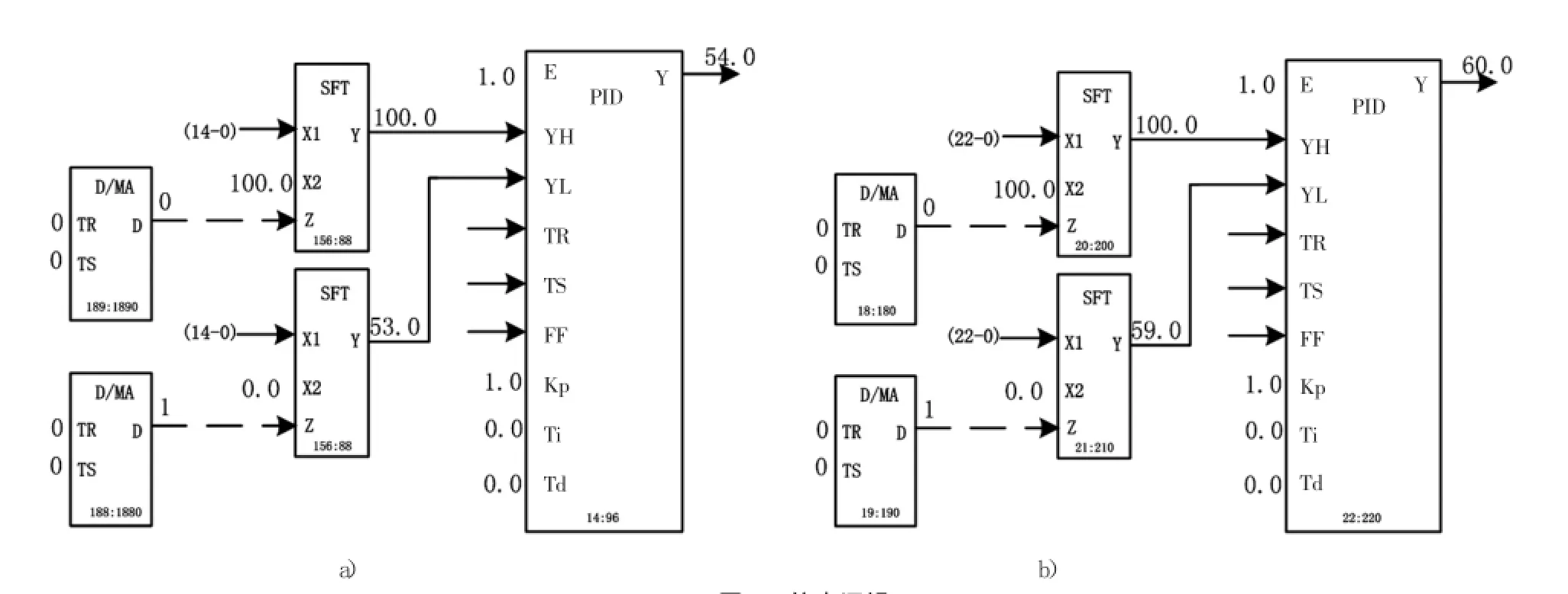
图6 仿真逻辑
4 防范措施
将DEH侧CCS汽机指令与流量设定值偏差定值改为19%,指令与反馈偏差大时优先切除机组AD S模式,AD S不在遥控,汽机主控跟踪汽机负荷参考值,DEH切回本地控制方式,保持当前值,运行人员可手动操作,防止汽机调门持续下调,确保机组安全运行。
对XD C-800、XD PS系统EPID高(低)限制逻辑进行排查,若高(低)限制采用变量方式时,将EPID修改为闭锁型偏差PID模块EPID 2(见表5),相应将闭锁增(减)信号接入EPID 2的LI(LD)引脚,,对DCS系统自动控制回路各手操器输出限值进行检查。若PID输出高(低)限位大于DCS系统手操器输出高(低)限位时,宜将EPID高(低)限值修正为手操器高(低)限值(必要时对EPID设置防积分饱和参数),或采取EPID高(低)变参数以及设定值偏差大解手动、反馈与指令偏差大解手动、输出指令越限解手动等方式,防止因手操器限值作用造成自动调节功能失效。
对各自动控制回路设定值设置回路进行检查。要求重要自动控制回路设定值输入回路具有高(低)限值功能,必要时增加设定值速率限值功能,防止因运行人员输入错误,造成自动控制输出造成指令突变。
对各自动控制回路被调量测量回路进行检查。单一模拟量信号要求具有品质判断功能,冗余模拟量信号应具有冗余信号偏差比较及品质判断功能,在信号品质异常或偏差越限时应发出报警、解除自动控制,防止因被调量测量信号异常,造成自动控制输出指令突变。
对各自动控制回路前馈作用进行检查。检查前馈各信号放大系数、微分环节是否准确,前馈回路宜设置高(低)限值,防止前馈信号异常造成自动控制输出指令突变。
对各自动控制系统跟踪回路进行检查。EPID控制回路应实现手/自动状态的无扰切换。手操器(或其它保护条件)跟踪回路应做到逻辑关系准确、跟踪量正确,防止因跟踪回路异常造成的自动控制输出指令突变。

表5 E P ID 2标记描述[2]
5 结语
提高热控系统的可靠性是热控工作人员的工作重点之一[4],一次调频同源逻辑的小小改动,造成了汽机指令的突变,危及机组的安全运行。如何做到防患于未然,减少热控保护的误动作,任何逻辑的修改必须对逻辑进行全面深入分析,对其彻底掌握后,才允许对逻辑参数进行修改。并做好仿真测试,确保逻辑准确无误,本文为同类型D CS系统设计控制回路闭锁增减提供借鉴。
[1]朱北恒.火电厂热工自动化系统试验[M].北京:中国电力出版社,2006.
[2]XD C-800功能块手册[M].上海新华控制技术集团有限公司.
[3]朱亚清,黄卫剑.一起一次调频设置不当引致机组跳闸事故分析[J].自动化博览,2008,(10):76-78+82.
[4]郑卫东,李晓燕,刘哲,等.容错技术在大型火电机组热控系统中的运用[J].电站系统工程,2013,05:53-56.
Analysis and Processing for Turbine Main Control Instruction Mutation
LI Xin-jian
(Huadian Weifang Power Generation Co.,Ltd,Weifang 261204,China)
A im ing ata certain power plant with the XD C-800DCS system,W hen the block turbine m ain control instruction,transform ed by prim ary frequency m odulation hom ologousdevice,increase ordecrease,the turbine m ain turbine change suddenly.Based on the controlloop sim ulation analysis,thispaperputsforward the logic optim ization m easure,which Providesa reference forblock increase ordecrease ofthe sam e D CS system design controlloop.
prim ary frequency m odulation;EPID;D EH;CCS;block;sim ulation;scan cycle
TM 621
B
2095-3429(2017)02-0021-05
2017-02-23
修回日期:2017-04-01
李新建(1979-),男,山东潍坊人,工程师,从事电厂热工方面研究工作。
D O I:10.3969/J.ISSN.2095-3429.2017.02.005
猜你喜欢
华人时刊(2023年1期)2023-03-14
电力设备管理(2022年15期)2022-11-26
湖北农机化(2021年7期)2021-12-07
汉字汉语研究(2021年2期)2021-08-30
商品与质量(2020年1期)2020-11-26
冶金设备(2019年6期)2019-12-25
汉字汉语研究(2019年2期)2019-08-27
资源节约与环保(2018年1期)2018-02-08
河北书画研究(2016年3期)2016-04-28
自动化仪表(2015年5期)2015-06-15