
Virtuozo自动空中三角测量方法与实践
2017-05-21 03:21:15韩梅
山东化工 2017年23期
韩 梅
(山东东方道迩数字数据技术有限公司,山东 济南 250000)
1 自动空中三角测量的介绍
利用一个区域中多幅影像连接点的影像坐标和很少的已知影像坐标及其物方空间坐标的地面控制点,通过平差计算,求解连接点的物方空间坐标与影像的外方位元素,称为区域网空中三角测量。通过区域网空中三角测量解算得出的影像的外方位元素,是后续的一系列摄影测量处理与应用的基础。
定义:
物方空间坐标系坐标:X、Y、Z
摄站(S)坐标:Xs、Ys、Zs
旋转角: φ、ω、κ
像点坐标:x、y
像主点坐标: x0、y0
航摄仪主距:f
其中像主点坐标和航摄仪主距称为内方位元素,摄站坐标和旋转角称为外方位元素。内方位元素定义:确定投影中心相对于航摄像片的位置所需要的元素即:x0、y0、f0其作用:一是将像点的框标坐标系坐标转化为像点的像空系坐标;二是确定摄影光束的形状。
外方位元素的定义:确定航摄像片及其投影中心在地辅系中的位置和方向所需要的元素。其作用是确定像空系在地辅系中位置和方向所需要的元素,即角元素和线元素。其中线元素为XS,YS,ZS三个位置元素;以及角元素三个φ、ω、κ 三个方向元素。
利用一个区域中多幅影像连接点的影像坐标和很少的已知影像坐标及其物方空间坐标的地面控制点,通过平差计算,求解连接点的物方空间坐标与影像的外方位元素,如果该方法是用数字摄影测量工作站实现,则成为自动空中三角测量。通过数字摄影测量工作站实现的空中三角测量解算得出的影像的外方位元素,是后续的一系列摄影测量处理与应用的基础。本论文就以自动空三软件 VirtuoZo AAT 来介绍Virtuozo自动空中三角测量方法。
2 VirtuoZo AAT介绍
2.1 空中三角测量的定义
空中三角测量是摄影测量生产中的关键步骤,它利用少量的地面控制点来计算一个测区中所有影像的外方位元素和所有加密点的地面坐标。在传统作业方式下,空三是一项非常乏味和耗时的工作,它主要包括:选择、转测加密点,量测加密点和控制点的像片坐标,进行区域网平差,检测并剔除粗差等作业。
2.2 VirtuoZo AAT的介绍
VirtuoZo 全数字摄影测量系统的影像配准算法具有可靠、快速和精确的优点。其中的自动空三量测(AATM)模块除半自动量测控制点之外,其他所有作业(包括内定向、选取加密点、加密点转点、相对定向、模型连接和生成整个测区像点网)都可以自动完成。PATB 光束法区域网平差程序具有高性能的粗差检测功能和高精度的平差计算功能,是目前国际上公认的著名平差软件。所以,将上述两个软件的优点结合在一起,即VirtuoZo AATM 和 PATB集成后就成为功能强大的自动空三软件 VirtuoZo AAT。
VirtuoZo 工作流程见图1。
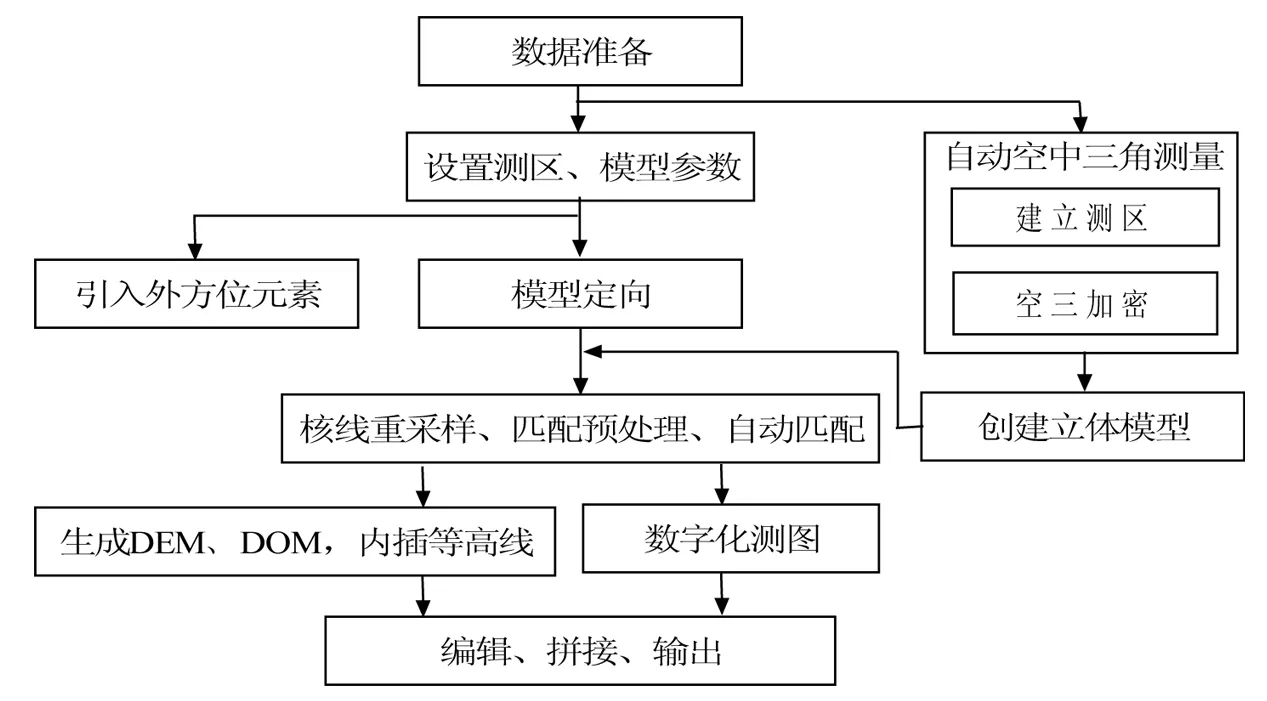
图1 VirtuoZo 工作流程
3 空中三角测量方法在工作中学习的流程简介
在掌握以上Virtuozo自动空中三角测量的作业流程和使用方法后,针对工作中的应用作如下简要介绍,共分四个部分:第一部分是空三数据准备;第二部分是空三自动转点;第三部分是空三加密;第四部分是空三完成后的测区合并与质量控制。
3.1 空三数据准备
3.1.1 建立测区
包括设置测区基本参数、建立相机文件、输入外业控制点、影像格式转换及建立测区影像列表。
3.1.2 自动内定向
内定向是数字摄影测量的第一步。这是因为数字影像是以“扫描坐标系 O-I-J”为准,即象素的位置是由它所在的行号 I 和列号 J 来确定的,它与像片本身的像坐标系 o-x-y 是不一致的。一般说来,数字化时影像的扫描方向应该大致平行于像片的x 轴,这对于以后的处理(特别是核线排列)是十分有利的。其步骤包括建立框标模板和检查自动内定向结果。
3.1.3 确定航线间的偏移量
为了在航线间自动转点,程序需要知道航线之间的相互关系,确定航线间的偏移量就是用来确定航线之间的相互关系的。通常,确定航线之间的相互关系,只需在相邻的航线之间人工量测数个同名点,这些点我们称之为航线间偏移点(Strip Offset点)。在普通航线(航向基本相同)之间和不同的航线组(交叉航线)之间,对航线间偏移点的数量有不同的要求:
对于两条普通航线,基本要求为在航线的头尾各量测一个点,当航线比较长时,有时可以在航线中间再均匀的量测一个或多个点。
对于不同的航线组,基本要求为在两个航线组(各包含多条航线)的公共区域内,人工至少量测3个偏移点,而且要求这三个点不要分布在一条直线上。
3.1.4 输入 GPS参数
在 VirtuoZo AAT中输入 GPS或 INS参数,有以下几点注意事项:
(1)创建测区时需要输入正确的摄影比例尺。
(2)在影像列表设置时要输入影像索引编号。
(3)准备一个文本文件输入 GPS 或者 INS 参数。
3.2 空三自动转点
3.2.1 自动转点
在做完上述数据准备工作后,就可以开始自动转点了,这部分作业计算机需要运算较长时间,但不需要作业员监管,因此,一个好的计划是尽量将数据准备工作安排在白天进行,而将自动转点过程安排到夜间进行,这样可以充分利用计算机而又减少人工的作业强度。另外,VirtuoZo AAT 的自动转点模块支持断电继续运行,这样即使自动转点过程中遇到停电,作业员在第二天也可以让程序重新启动后继续运行。
3.2.2 自动转点中的异常处理
在自动转点的最后,系统一般会给出整个自动转点过程中的警告信息和错误信息,这是因为实际的数据情况千差万别,一般说来,当测区比较大时,总会存在少数自动转点失败的异常情况,所以如何解决这些异常问题就非常重要了。需要指出的是,只有当用户排除了自动转点中的所有异常,才能够进入下一步作业,即自动挑点。
在 VirtuoZo AAT 中设置了几个工具用于解决自动转点过程中的异常问题。在每一次自动转点后,用户都应该首先检查转点报告的最后是否有错误提示。
如果有则需要按本章介绍的方法排除错误,然后在主界面下单击 TrianglationTie-point ExtractionContinue 菜单项继续完成转点过程,直至没有任何错误提示(警告提示可以忽略)为止。
3.3 空三加密
完成自动转点之后,开始进入空三加密作业的最后一步,即编辑连接点并进行平差。一般说来,加密作业的步骤为:
量测控制点。
在标准点位增加像点。
调用平差程序进行平差计算。
删除或编辑粗差像点。
重复第 3步和第 4步直至满足加密要求。
输出加密成果。
3.4 测区合并及质量控制
3.4.1 测区合并
如果是单个测区加密完成后,直接输出加密点,即可完成加密工作。但是在实际作业过程中,一个大的测区要分成多个子测区,这时就需要对每个子测区进行合并,传统的测区接连检查对于无人机项目会有一定的误差,这时选择测区合并,是最理想的方法,同时可以弥补子测区缺少外业控制点的情况。
如果与本测区接边的测区不在本机硬盘上,有两种方法解决:
映射网络驱动器;
将所须文件(测区名.tpc、所有的控制点文件、相机参数文件)拷贝到本机并建立测区进行测区合并接边。
3.4.2 质量控制
每个作业流程(内定向、相对定向、转连接点、构网、平差等)必须经专职质量检查员检查认可。
凡是遇到超出精度指标的情况,必须经过质检人员确认,方可处理。
每个作业流程均应保留相应的精度指标记录文件,将与成果一同上交。
空三加密过程中发现的控制点错误,必须一一作文字记录,反馈给外业进行核实。
每个区域在与周边区域接边后,需填写图例表,绘接边示意图,标明定向点、检查点、公共点连接点误差数值。
生产管理和质检人员应绘制每个区域的质量记录图表,包括像对数、作业人员、质量等级、完成日期等。
4 结束语
随着全世界科技的发展,用于城市规划、建设和管理的城市地形图DOM需求量增多,数字正射影像图大规模的制作与应用已经被广泛的应用,同时数字影像地形图是“数字城市”发展的必然趋势,为正在建设中的现代化提供有力的信息支持和信息保障。
另一方面摄影测量数据获取技术的迅猛发展,虽为地理信息产业打开新的领域,但也为摄影测量提出了新的问题,除了上述的数据获取手段的迅速发展,摄影测量由模拟、解析发展到今天的数字摄影测量,它在理论到实践上如何进一步发展?
在以后的专业应用中空中三角测量必将得到更加充分的应用的发展,为此,更快捷的获取和处理数据、海量数据,以及准确地提取特征地物的数字信息正在面临着更加严峻的考验,同时自动空中三角测量的方法和理论研究必将在摄影测量这一领域得到越来越艰巨的困难,希望在以后的工作和实践中能够得到更加深入和前沿性的学习。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14 03:10:40
河北地质(2021年4期)2021-03-08 01:59:14
中国铁道科学(2019年5期)2019-10-19 07:55:14
测控技术(2018年10期)2018-11-25 09:35:40
测绘通报(2018年10期)2018-11-02 10:07:28
北京航空航天大学学报(2017年4期)2017-11-23 05:48:22
中小企业管理与科技·下旬刊(2017年7期)2017-08-24 02:13:53
中国工程咨询(2017年12期)2017-01-31 02:56:54
安徽地质(2016年4期)2016-02-27 06:18:21
全球定位系统(2015年4期)2015-02-28 12:38:12
