
基于容错设计的城市道路禁货系统研究
2017-05-17 11:38:15丁柏群赵娣
森林工程 2017年3期
丁柏群,赵娣
(东北林业大学 交通学院,哈尔滨 150040)
基于容错设计的城市道路禁货系统研究
丁柏群,赵娣
(东北林业大学 交通学院,哈尔滨 150040)
在城市一定区域内实施大型货车禁行、限行的交通管制可有效缓解道路交通压力,但大货车违章现象仍然是现代城市交通中一个严重的问题。论文针对传统禁货管理措施工作量大、成效低、缺乏容错性等问题,通过分析驾驶人反应特征和城市道路交通环境,提出路侧标志牌复设方法和基于多摄像机远近景协同拍摄的大型货车识别方法;综合LED违法警示管理及违法数据采集传输管理等功能,构建容错性较强的实时、高效的大型货车禁限行管理系统,可成为智能交通运输系统的有机组成部分。
大型货车;交通管制;标志牌;容错设计;禁货系统
0 引言
在城市一定区域特别是中心城区对大型货车实施限路、限时、禁行等措施,是很多大城市为缓解交通拥堵、减轻交通压力和环境污染所采取的管理措施[1]。目前对大型货车禁限行的实际管理主要局限于发布交通管理信息、设置交通限行和诱导标志、交警巡逻检查、现场处罚和居民举报等[2];这些措施具有相应作用,但大型货车违章闯行现象仍然比较多,其中外地驾驶员由于不熟悉该城市交通情况、提示信息不充分、疲劳等因素造成的误闯也为数不少。交通管理部门很难仅仅依靠人力对所有禁限行区域实行全方位管理,采用现代化交通工程设施实现有效禁货,对城市交通管理有实际意义。所谓容错性设计是指驾驶人在行车过程中有时难免出现注意力不集中、接收信息不完整或操作失误,应该为这类失误提供宽容的空间和适当的弥补措施,以保证交通管理控制的有效性和行车安全[3]。本文通过综合研究交通标志设置、车辆检测与识别、可变信息警示、数据传输管理4个功能模块,构建一种具有容错性的大型货车禁限行系统。
1 道路禁货系统方案
道路禁货系统主要包括禁令指示标志、车辆检测识别、可变信息警示、数据传输管理等模块。图1为系统应用场景布设示意图。系统所需硬件设备包括:标志牌、摄像机、视频采集卡、工业控制机、高清照相机、LED显示器[4]、补光灯和立杆等。

图1 道路禁货系统布设Fig.1 Application scene diagram for the installation
道路禁货系统的工作过程:车辆在驶入禁货路段前,通过连续设置多个路侧禁令、限速标志,提示驾驶员绕行或停驶;当车辆驶入检测区域时,系统开始进行车辆检测跟踪及大型货车的识别工作,并核查其是否有“道路通行证”,若识别出当前车辆为无证大型货车,则会连接LED可变信息示警装置,在车辆到达视认点附近时,警示大型货车当前存在的违法行为,并在LED屏上显示车辆牌照号、示警缘由等,同时将数据传输到控制中心,若检测到车辆有通行证,则可以正常通行;当车辆经过检测线时,后方高清相机将抓拍车辆图像信息,传送到后台数据管理系统,并保存至违章数据库,作为管理部门处罚的依据。若驾驶员能在车辆行驶至检测线前停车或掉头,则车辆不属违章行驶,不会进行相关处罚;否则,管理部门可以通过后台管理系统对违禁车辆实施罚款、扣分等措施。其工作流程如图2所示。
2 标志牌设置的数量和位置
2.1 交通标志位置设置依据分析
从驾驶人发现交通标志到采取并完成相应行动,要经历标志的发现、读取、决策和行动等过程[5],如图3所示。

图2 系统工作流程图Fig.2 System workflow diagram

图3 驾驶人发现标志至行动结束过程Fig.3 Process diagram of the drivers found signs to take action and to end
可见,标志牌设置的位置必须能够使驾驶员在车辆到达检测线前停止或掉头[6],即
s+D>c+d+b+L=V0t1+V0t2+V0t3+L。
(1)
式中:V0为各点的正常行驶车速;s、D、c、d、b、L分别为标志视认距离,警告标志设置的前置距离读取距离、决策距离、操作反应距离、行动距离;t1、t2、t3分别为驾驶人读取标志时间、决策时间和操作反应时间。
标志视认距离S可计算如下(如图4所示):
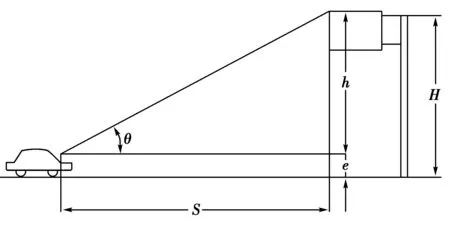
图4 标志视认距离Fig.4 Visual cognition distance of sign。
(2)
式中:h为驾驶员水平视线与标志板上边缘间的垂直距离;H为标志牌上缘距离地面高度;θ为读取标志点驾驶员眼睛和标志牌上缘连线与水平线夹角,可通过仪器测得;e为驾驶员视线高,小汽车取1.2 m,载重汽车取1.8 m。
2.2 标志牌数量
如图5所示,如果内侧车道车辆在其认读距离l内不被大车遮挡,就可以认为不存在遮挡问题。即图中两个矩形区域都没有大车出现或出现大车的概率都很小时,内车道驾驶人视线不会被遮挡或被遮挡的概率很小;否则必须考虑遮挡问题。首先要求出路侧标志对应矩形的大小,然后根据车流量求出矩形区域内出现大车的概率。如果每个标志对应的矩形区域内出现大车的概率为p0,则连续设置的n个标志都出现大车遮挡的概率为:
P=p0n。
(3)
当按上式计算得到的P值非常小,也是至少有一个标志牌不被遮挡的概率很大时,此时的n值即是多个路侧标志牌的设置数量。或者也可以将路侧标志更改为门架式标志。
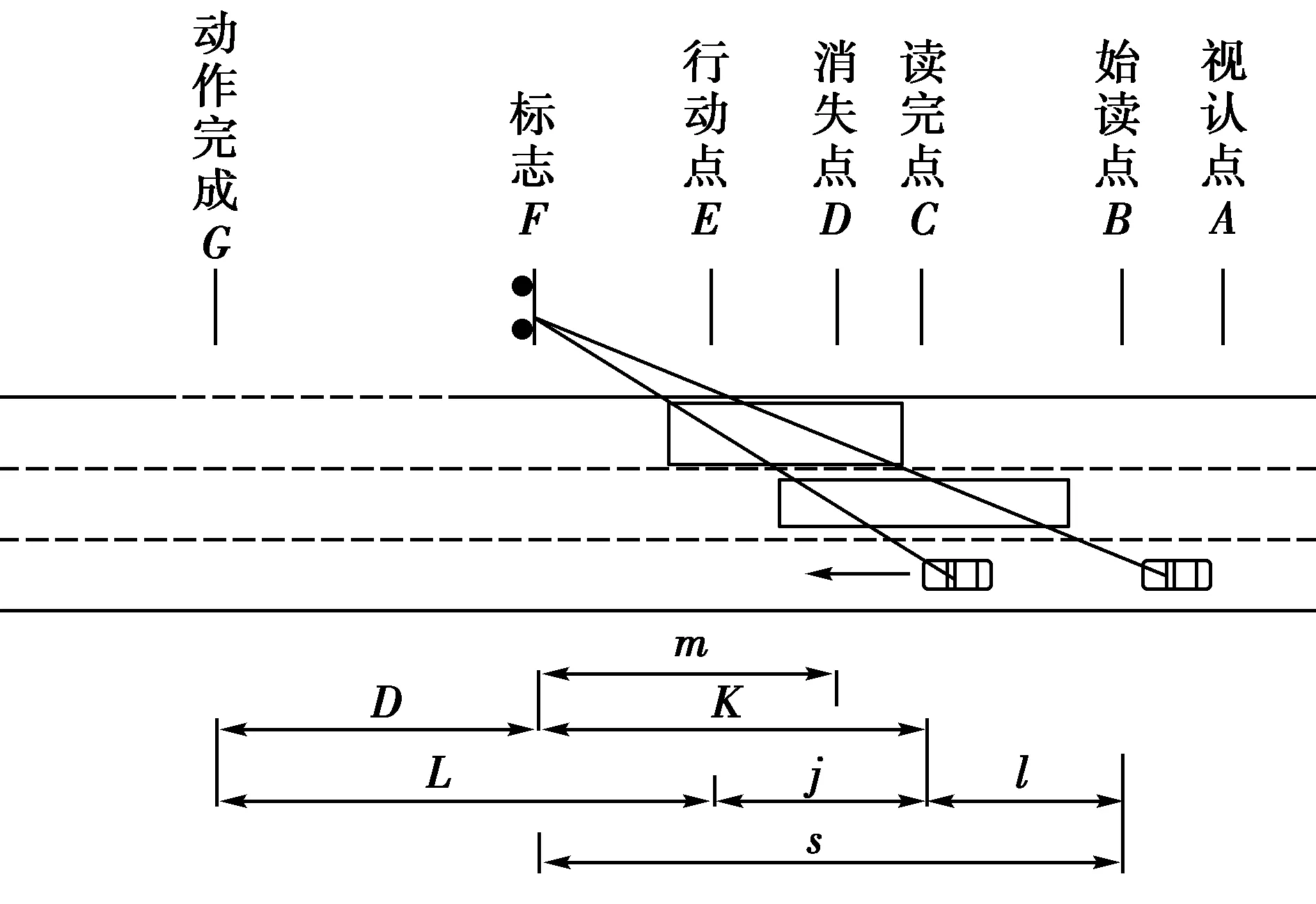
图5 标志的认读过程(大车遮挡)Fig.5 Identifying process of sign(CART block)
2.3 标志牌位置
从点C到标志F的距离称为读完标志后的剩余距离K;从点C到标志F的距离称为消失距离。如果距离m比距离K长,就意味着点C在消失距离范围内,那么驾驶人就难以准确判读标志内容[7]。因此标志的设置地点不仅要满足驾驶员完成操作(如公式(1)),还必须满足K>m的要求,即:
s=L+j+l-D=K+l。
(4)
j=V0t3。
(5)
D=L+j-K。
(6)
l=V0t2。
(7)

(8)
式中:s、j、D、K、L分别为视认距离、判断距离、前置距离、认读距离和行动距离,V0为车辆正常行驶速度,m/s;V1为到达检测线处的车速;t2为识读时间,通常为2.0~3.0 s;t3为决策时间,通常为2.0~2.5 s;a为减速度,通常为0.75~1.5m/s2;n为车道数。
D必须满足条件:

(9)
D即是当标志牌数量为1块时的最小前置距离。
交通标志设置的间距,以驾驶人读完前一个标志内容并调整车辆运行状态后,再呈现下一个标志为原则。这一间距应视标志内容的复杂程度而定[8]。如果取时间间隔为2.5 s,则标志间距(m)为:
s+2.5V1+j-K=I+2.5V1+j。(10)
假设路侧标志最小间隔为U,则对于龙门架多路侧交通标志设置位置可选取为:第1、2、3块警告标志位置为距龙门架D+U、D+2U、D+3U处,第n块为距龙门架D+nU处,第2块及以后的路侧标志可适当取整。
3 大型货车识别方法
现有的车型识别大多都是将车辆分为大车和小车,而没有将大货车作为一个类型来进行识别[9-10]。为此针对城市道路,利用基于多摄像机远近景协同拍摄的大货车识别方法,即通过安装在路段正上方的一个摄像机用于拍摄各车道的共同远景,另外几个摄像机分别摄取各车道的近景图像,用于识别车辆牌照,并确定车辆在远景图像中位置。
3.1 大型车检测及分割
现有软件能识别车牌号码、车牌颜色和车牌在近景中的位置等。通常大型车对应号牌颜色为黄底黑字,小型车为黑底白字或蓝底白字,由此可以直接通过号牌颜色将车辆分为小车和大车[11]。如果要再将大货车从大车中分离出来,就需要将大车从远景图像中辨析出来。
首先,确定出车牌在远景中的位置,再进行局部搜索分割出大车区间。由于本文系统检测的目标为运动物体,而传统的背景图像的初始化方法要求在初始化过程中不能出现运动目标。所以,这里采用自适应混合高斯背景模型[12]初始化背景图像(可以有效地消除影子的影响),同时融合帧间差分和背景差法来提高模型的收敛速度。在图6(a)中,右下角截取的矩形区间即为车辆区间,如图6(b)所示。
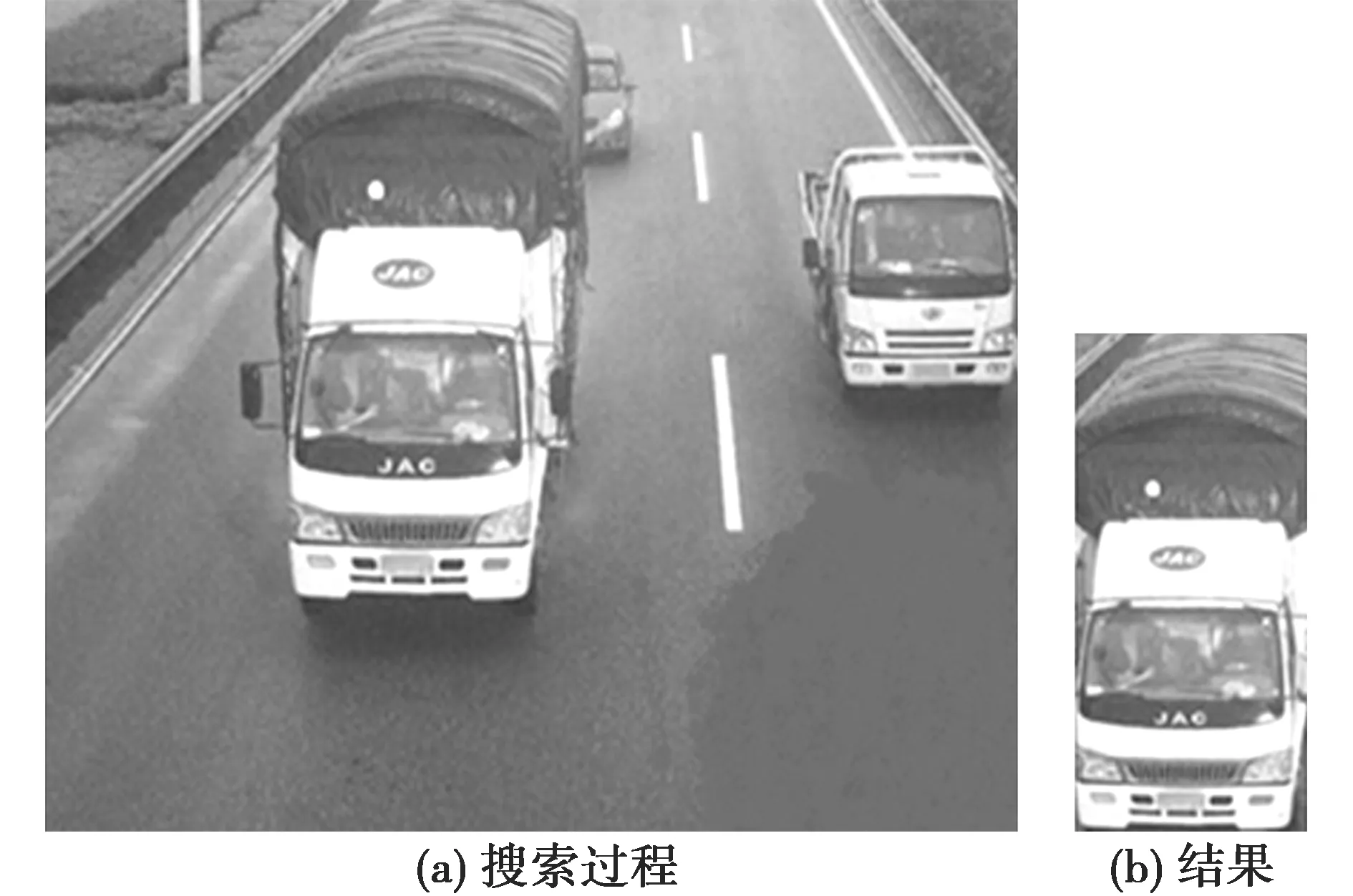
图6 大型车辆辨析Fig.6 Large vehicle identification
3.2 客货车型分类
大货车和大客车在车体结构区间和颜色上明显不同。在监控图像上,大货车通常可划分为四个或四个以上的区间,且前风挡车窗较小;而大客车通常有三个区间且前风挡车窗较大。大客车图像颜色单一,即除去车窗外,车身颜色较均匀,而大货车由于装载货物不同等原因,往往车身和车头呈现不同颜色。因此本文引入车体区间数、区间颜色数和前风挡车窗比例作为三个结构特征,通过叠加分界线进行区分(如图7)。
Mean shift算法是一种有效的统计迭代算法,无论从特征空间的哪一点开始计算,迭代到最后都会达到一个模式点(不动点)[13]。这样采集到的车辆正面图像就会被分为许多小区域,然后对这些小区域上的每一个像素点进行聚类、合并,实现基于Mean shift的区域分割,并提取各区间分界线。
获得的三个特征值如下:
区间数:分界线数+1。
颜色数:各区间颜色为此区间内标记众数最大的颜色均值。当两区间颜色欧式距离大于一定值时颜色不同,否则相同。再统计颜色数。
前窗比例:从位置和大小上对前窗作限制。
将上述方法所获得的三个特征值分别与货车对应特征的阈值进行比较,若三个特征值同时满足条件,则认定该车为大货车,否则为大客车。

图7 大货车和大客车图像分区Fig.7 Distinguish between large truck and omnibus
3.3 车辆的跟踪定位
在检测到场景中的车辆后,同时还要进行车辆的跟踪。这时车辆在短时间内的速度和方向变化都不大,但车辆跟踪对实时性要求较高。这里采用基于卡尔曼滤波预测的Meanshift算法来实现车辆的跟踪,Meanshift算法简单、计算量小、快速,再利用卡尔曼滤波预测跟踪目标在后续图像的位置,减小收拾范围,可以很大程度上避免跟丢目标的问题。
当系统识别出目标为违章车辆,在车辆行驶至图像背景中预设的标记处(事先判定的LED屏视认点)时,将其车辆信息以及违法行为显示在门架式LED可变信息板上,显示信息的时间持续到车辆行驶至另一标记处(消失点)之后,此时,跟踪结束。若判定为非违章车辆,则跟踪结束。
4 数据传输及管理
4.1 LED警示装置
在识别出违章车辆后,将其车辆信息以及违法行为显示在门架式LED可变信息板上,以警示驾驶员纠正当前行驶状态,如图8所示;由于信息板位置较高,显示的信息可以对后续驶来的类似车辆产生远距离示警作用。另外,如果出现多辆货车同时违章,LED屏会滚动播出。
特别地,LED板在另一意义上相当于门式标志牌,到检测线的距离就为前置距离,其布设方法同第1节标志牌的设置方法。
图8 门架式LED警示装置Fig.8 Gantry LED warning device
4.2 前端设备数据采集
监控前端主要完成视频数据的采集、处理、无线网络的接入等功能。前端设备包括:高清数字摄像机、补光灯、视频采集卡、工控机、高清照相机等。摄像机采集实时交通流影像数据,然后通过视频采集卡将模拟视频信号压缩编码成数字视频信号[14-15],再将其输入到工业控制计算机中进行处理和分析,判断是否为大货车,且检测该车辆是否有“道路通行证”。流程图如图9所示。

图9 前端设备系统流程图Fig.9 Flow chart of the front-end equipment system
本文在对高速公路视频监控中的视频进行编码后,采用H264压缩算法对其进行压缩处理,从而使得在同等的网络条件下能够传输更多的信息量,使得高速公路监控视频的视频数据码流失降低,提高监控视频的清晰度及实时性[16]。
4.3 数据传输及管理
采集的违章大货车数据通过3G移动通信网络发送到数据库管理中心和LED警示系统。首先将有闯禁趋势的车辆信息和警告信息传送到现场LED显示屏上,警告相应驾驶员及类似现象;如果违禁车辆在警告后继续闯关,则将抓拍到的车辆图像等信息传输到数据库管理中心,并存储到违章管理数据库,然后通过后台管理系统对违章车辆实施罚款、扣分等惩戒措施。其工作流程如图10所示。
(1)违章登录模块:对将检测到的违章车辆信息与其抓拍图像统一存入违章数据库,同时建立违章车辆处罚档案。
(2)违章查询模块:将车牌号、车型、违章地点、发动机号码等信息输入违章查询平台,在违章信息数据库中查询违章处罚信息。打印查询结果、违章通知单和违章车辆图像。
(3)违章统计模块:根据违章地点、违章时间等信息在违章数据库中进行分类统计,并发布在违章查询平台上,30min更新一次。
驾驶员可在收到违章通知后,在相应限制时间内,到指定地点办理处罚手续。

图10 数据传输管理模块结构图Fig.10 Structure diagram of the Data transmission management module
5 结论
目前单纯以禁限行标志为主的禁货管理措施,普遍工作量大、方式落后且覆盖面小,很容易产生管理疏漏;而且在城市道路复杂的交通环境下容错性不足,容易产生驾驶员误闯现象,实际效果受到一定影响。本文所构建的城市道路禁货系统基于容错设计理念,通过门架式LED可变信息装置,及其与路侧复设禁限行标志的联合警示作用,对驾驶员形成逻辑性提示、重复预警,可以避免现行禁货措施的被动性和疏漏,更有效地减少大型货车的闯禁行为;通过大型车辆图像识别筛选出目标车辆,避免传统背景图像初始化时的弊端;通过与数据采集、传输和后台处理系统联动,形成实时、高效的禁货管理系统,可成为智能交通运输系统的有机组成部分。
[1]Lai A H S,Fung G S K,Yung N H C.Vehicle Type Classification from Visual-based Dimension Estimation[C].2001 IEEE Intelligent Transportation Systems Conference Proceedings,Oak-land,USA,2001:201-202.
[2]段里仁,毛力增.因势利导,交通管理科学的重要理念[J].综合运输,2013,1(18):80-86.
[3]李雪.基于容错理念的快速路指路标志设置方法研究[D].哈尔滨 :哈尔滨工业大学.
[4]侯启真,刘衍帆,薛荣荣,等.雾和霾环境下跑道关闭警示装置灯光的衰减研究[J].科学技术与工程.2016,16(22):132-136.
[5]李令举,张继民,宋舒.道路交通标志的设计[J].云南交通科技,1999,15(1):6-12.
[6]张毅,游克思.基于信息设计的道路交通标志设置方法理论研究[J].城市道桥与防洪,2014,(3):114-117.
[7]杨久龄,刘会学.GB5768-1999道路交通标志和标线应用指南[M].北京:中国标准出版社.1999.
[8]郑安文,牛倬民.高速公路静态交通标志设置科学性分析[J].交通运输工程学报,2002,2(4):49-53.
[9]Burden M J J,Bell M G H.Vehicle Classification Using Stereovision[C].6th International Conference on Image Processing and its Applications,Dublin,Ireland,1997:881-885.
[10]Morris B,Trivedi M.Robust Classification and Tracking of Vehicles in Traffic Video Streams[C].2006 IEEE Intelligent Transportation System Conference Proceedings,Toronto,Canada,2006:1078-1083.
[11]Comaniciu D,Meer P.Mean Shift:A Robust Approach Toward Feature Space Analysis[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2002,24(5):603-619.
[12]邱联奎,刘君亮,赵予龙,等.混合高斯背景模型目标检测的一种改进算法[J].计算机仿真.2014,31(5):378-384.
[13]张彬,王永雄,邵翔.基于扩展Mean Shift算法的移动目标跟踪研究及实现[J].软件导刊,2016,15(10):106-110.
[14]Zhen C,Yu H,Wen J,et al.A Survey of Bitmap Index Compression Algorithms for Big Data[J].Tsinghua Science and Technology,2015,20(1):100-115.
[15]Shaban O,Li B.A New DCT Image Compression Algorithm Using Block Visual Activities[J].Computer Aided Drafting Design & Manufacturing,2006,16(2):78-82.
[16]张纪铃,夏超,黄富良.一种基于H264编码标准的快速运动估计算法[J].电子测量技术,2009,32(8):69-73.
Research on an Urban Large Truck Prohibited SystemBased on Fault-tolerant Design
Ding Baiqun,Zhao Di
(School of Traffic,Northeast Forestry University,Harbin 150040)
In a certain area of the city,the implementation of traffic control of ban or restriction on large trucks can effectively alleviate the pressure on the road traffic,but the phenomenon of large trucks violation is still a serious problem in modern urban transportation.According to the problems in traditional large trucks prohibited management,such as heavy workload,low efficiency,lack of fault tolerance,etc.,after analyzing drivers’ response characteristics and urban road traffic environment,this paper puts forward the method of duplicating the roadside sign and large trucks recognition method of multi camera long-distant and close shots.Combing with LED illegal warning management and illegal data acquisition and transmission function,we can build a large truck prohibited management system of strong fault-tolerance,real-time and efficiency,which can be an integral part of intelligent transportation system.
Large truck;traffic regulation;sign board;fault-tolerant design;truck prohibition system
2017-03-06
国家自然科学基金项目(51078113)
丁柏群,硕士,教授。研究方向:交通管理控制、交通规划。E-mail:ding_bq@163.com
丁柏群,赵娣.基于容错设计的城市道路禁货系统研究[J].森林工程,2017,33(3):94-99.
U 491.4;U 491.5+2
A
1001-005X(2017)03-0094-06
猜你喜欢
幼儿画刊(2023年12期)2024-01-15 07:06:14
建材发展导向(2023年24期)2024-01-11 09:19:50
环球时报(2022-12-28)2022-12-28 15:19:17
江苏安全生产(2022年4期)2022-05-23 13:03:44
运输经理世界(2021年10期)2021-09-02 02:06:36
作文小学中年级(2018年2期)2018-03-28 10:20:34
中国交通信息化(2017年8期)2017-06-06 07:16:31
学与玩(2017年6期)2017-02-16 07:07:24
河南电力(2016年4期)2016-11-30 01:07:08
大社会(2016年3期)2016-05-04 03:40:52
