
危化品仓库障碍物扫描定位和还原算法的研究
2017-05-17 13:48刘学君袁碧贤
自动化仪表 2017年5期
刘学君,李 京,2,卢 浩,2,戴 波,袁碧贤,2
(1.北京石油化工学院信息工程学院,北京 102617;2.北京化工大学信息科学与技术学院,北京 100029)
危化品仓库障碍物扫描定位和还原算法的研究
刘学君1,李 京1,2,卢 浩1,2,戴 波1,袁碧贤1,2
(1.北京石油化工学院信息工程学院,北京 102617;2.北京化工大学信息科学与技术学院,北京 100029)
随着现代物流业的发展,仓储安全越来越受到人们的重视,危化品仓库的仓储安全尤为重要。危化品仓库中障碍物的扫描、定位、还原过程,用于显示障碍物的位置、大小和形状等准确的数字化信息。根据这些信息,管理员可对仓库内部情况作出准确的判断,并采取恰当的措施,有效预防危化品仓库安全事故的发生。为了对危化品仓库的障碍物进行扫描、定位和还原形状尺寸,对激光扫描装置测得的数据进行了数据拟合。首先,利用激光扫描装置对无障碍物进行扫描,得到扫描数据并拟合建立正常状态。然后,对长方体障碍物的情况进行扫描,对得到的异常点进行数据拟合。最后,对圆柱体障碍物进行扫描,对收集到的异常点进行数据拟合。试验结果表明,采用该算法得到的长度最大误差值小于0.05m,能较好地实现图像还原,满足危化品仓库监控需求。该算法经济实用,具有很好的应用前景。
物流; 仓储安全; 危化品; 激光扫描; 障碍物; 最小二乘法; 误差
0 引言
随着国民经济和现代物流业的迅速发展,仓储安全显得越来越重要[1-2],尤其是在危化品仓库方面。危化品具有易燃易爆的特点[3-4],一旦危化品仓库发生事故,对人们的生命和财产将会造成不可估量的损失[5-6]。为了预防发生危化品仓库安全事故,传统情况下,一般采用视频监控技术。视频监控依据视频图像来查看仓库内异样,需要人长期在屏幕前监视。针对视频监控的缺点,设计了一套激光扫描监测装置,对仓库障碍物进行安全监测。在危化品仓库中,激光扫描装置扫描到障碍物,并对其进行定位和形状尺寸还原,给管理员报警。管理员可以根据障碍物的位置、形状和尺寸,决定怎么处理发现的障碍物。
1 系统结构
扫描监测装置分为主控单元、细分驱动、步进电机、蜗轮蜗杆、距离传感器、角度检测传感器[7-9]这六部分,其结构如图1所示。主控单元接收位置信息并处理,发出控制信号给细分驱动。细分驱动是主控单元和步进电机的中间环节,把逻辑控制信号细分转化为可驱动步进电机运行的功率电流。步进电机是执行机构,接收细分驱动传过来的驱动信号,并按相应指令动作。蜗轮蜗杆是步进电机与工作台之间的连接机构,其作用是增大步进电机的扭矩和转换运动方向。距离传感器收集距离数据,角度检测传感器收集角度数据,它们把这些信息反馈给主控单元。
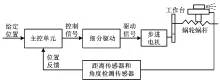
图1 扫描监测装置结构图
2 算法研究
对扫描程序的设计,先用激光扫描,判断有无异常点。没有异常点,状态正常,绘制图形,作为原始状态;当发现异常点时,判断位置,进行数据统计,并且数据拟合,与数据库作比对,判断是直线还是曲线,组合出来图形是矩形还是圆形或者其他图形。管理员根据图形和长度决定处理方法。本研究中,把最小二乘法应用到图形恢复和尺寸还原,建立一个原始数据状态。当扫描到异常数据时报警,并对异常点拟合,与数据库作对比,从而大致判断障碍物的形状和尺寸。
拟合就是把一组数据拟合成一个最佳匹配函数。数据拟合采用的算法为最小二乘法。设逼近函数为[10-11]:
f(x)=a0+a1x+…+anxn
(1)
式中:a0,a1,…,an为待定系数。
(2)
方差取得最小值时得到系数值(a0,ai,…,an),进而可以得到逼近函数。当σ2数值最小,数据点在曲线两侧分布最均匀时,即令ε=f(xk)-yk。n为自然数,取值范围预先设定为1~3,根据拟合曲线选择最匹配的值。
2.1 对无障碍物的扫描算法
首先,固定扫描仪三脚架,调整激光扫描平台位置,避免平台歪斜或摆设不符要求,并记录扫描仪位置。然后,开启监测装置,对没有障碍物时进行扫描,即在正常情况下进行激光扫描,建立正常状态,作为参考,将没有障碍物时的数据拟合。程序运行进入监控状态,用激光扫描得到数据。数据图采用直角坐标系,以激光扫描仪口为原点。激光扫描得到的数据以直角坐标系显示,即可得到(x,y)坐标点的数据图。试验中,激光扫描仪的激光发射口取为坐标原点(0,0),旋转扫描得到各个角度对应的距离值。设计扫描角度范围在125~135 ℃时有障碍物,编码器精度为0.02 ℃。角度值和距离值转换为对应的直角坐标值。编码器得到的角度值是十六进制,需要通过数制转换得到十进制数。
激光扫描仪扫描得到角度和距离值数据,进而对极坐标进行转换得到直角坐标数据图。无障碍物时,激光扫描得到无障碍物数据图。数据点大约在X轴(-1.65,-1.2)和Y轴(1.5,1.9)之间。采用最小二乘法,将这些数据点进行数据拟合,得到拟合曲线图。无障碍物数据拟合曲线图如图2所示。
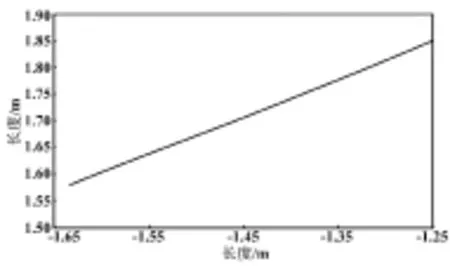
图2 无障碍物数据拟合曲线图
由图2可知,拟合曲线的函数表达式为y=0.697 8x+2.719 2,而曲线长度积分公式[12]为:
(3)
将数据点数值代入曲线长度积分公式(1),得到曲线长度0.471 m。实际扫描宽度为0.490 m,所以产生误差为0.019 m。
2.2 对长方体障碍物的扫描算法
在激光扫描范围内放置一个长方体盒子,扫描2次后,得到长方体障碍物数据图。将扫描得到的数据与正常情况无障碍时的距离进行比对,在X轴(-1.45,-1.25)和Y轴(1.5,1.65)之间,出现一些异常点,判断为障碍物,进行报警。对获得的数据点进行数据拟合,得到长方体障碍物数据拟合图。这样,管理员可以大致判断在相应位置存在有棱角的障碍物,判断为矩形物体。长方体障碍物数据拟合曲线图如图3所示。
其二,我喜《杂文月刊》,是因她是“一本有良知、讲真话的杂志”。她不同于某些网页戴着墨镜看世界,所载尽是唯恐天下不乱的“愤青文”;也不同于某些脱离实际,不接地气的“伪高调”“假大空”的“鸡汤文”。她是和党中央在政治上保持高度一致的大前提下,联系当今社会人民群众身边的真人真事,针砭时弊,激浊扬清。不仅提出问题、分析问题尖锐、泼辣,有精辟独到的见解,而且也有解决问题的建设性意见,把话说到了老百姓的心坎上,自然引起了老百姓的共鸣。不仅有令人荡气回肠之感,还能让人深思,自己应该怎么做,实现杂文“以文化人”传播正能量的使命。
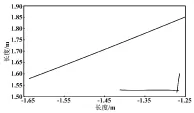
图3 长方体障碍物数据拟合曲线图
拟合得到三个拟合曲线函数,函数表达式分别为:f(x1)=y1=0.699 7x1+2.727;f(x2)=y2=12.581x2+17.5;f(x3)=y3=0.026 8x3+1.493 6。
根据曲线长度公式(1),得到长方体宽度为0.088 m、长度为0.141 m,而实际长方体宽度为0.095 m、长度为0.155 m;扫描数据误差分别为0.007 m和0.014 m。
2.3 对圆柱体障碍物的扫描算法
在激光扫描范围内放置一个圆柱体,扫描2次得到圆柱障碍物数据扫描图。与无障碍物时正常状态的数据作对比,数据图在X轴(-1.4,-1.25)和Y轴(1.55,1.65)之间出现异常点,进行报警。所得到的数据点被拟合,得到圆柱障碍物数据拟合图。异常点为一段弧线,判断为圆柱类障碍物。圆柱障碍物数据拟合曲线图如图4所示。
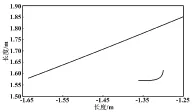
图4 圆柱障碍物数据拟合曲线图
拟合函数表达式为:
f(x1)=y1=0.700 9x1+2.723 8
(4)
异常数据点取自变量2次幂,拟合度较好,拟合曲线函数表达式为:
(5)
f(x2)是一个二次函数,即为一段弧线。弧线可被判断为原柱状物,由于f(x1)直线缺一段,故测得直径为0.073 m;圆柱体实际直径为0.077 m;激光扫描数据误差为0.004 m。
3 试验结果
把试验扫描的曲线长度与实际物体尺寸进行对比,如表1所示。
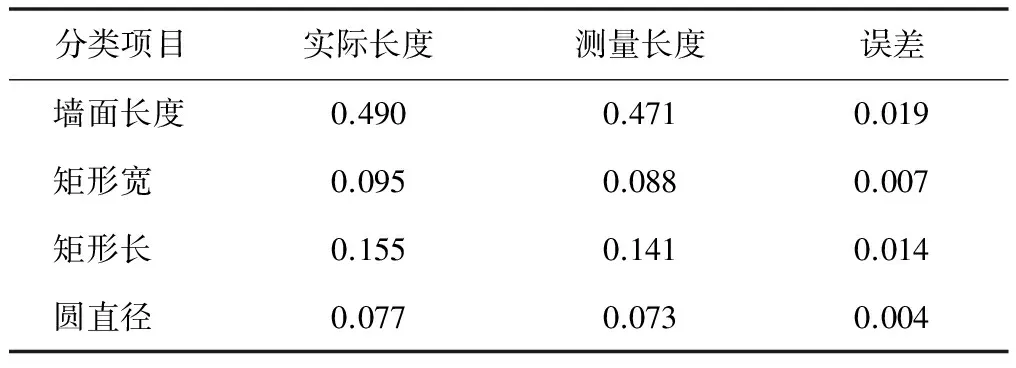
表1 试验结果与实际情况的对比
表1分别对墙面长度、矩形宽、矩形长和圆直径实际测量长度和扫描测量长度进行了对比。由表1数据可知,采用本算法的扫描计算得到的长度最大误差为0.019 m,小于危化品仓库要求的0.050 m,满足危化品仓储需求。
4 结束语
危化品仓库中的障碍物定位和形状还原,对预防危化品仓库事故极具意义。本研究设计了一套扫描仪监测装置进行扫描定位,建立原始数据状态,当扫到异常点的时候,用最小二乘法数据拟合。通过对长方体,圆柱状物体的试验,证明对障碍物距离、形状和尺寸恢复有较好的效果,误差小于安全要求的0.050 m,满足危化品仓库需求。在实际情况中,该方法能为管理员清楚提供危化品仓库障碍物的相关数据,使库内状态信息数字化,为判断和处理库内情况提供切实依据。该方法为多个固定激光扫描仪组合,数据汇总得到障碍物立体图和仓库全局状态图奠定基础,为危化品仓库监控提供技术支持,具有很好的应用前景。
[1] 甘学.危险化学品仓库的安全管理策略研究[J].煤炭与化工,2015(6):158-160.
[2] 裘静.探讨港口危险品的仓储安全管理问题思考[J].中国金属通报,2016(6):61-62.
[3] 师立晨,王如君,多英全.我国危险化学品重大危险源安全监管存在问题及建议[J].中国安全生产科学技术,2014,12(12):161-166.
[4] 范祥,叶春明,仝伟亮.新形势下我国危化品仓储安全问题研究[J].物流科技,2016(10):148-151.
[5] 毕文婷.危险品仓储如何“转危为安”[J].劳动保护,2016(8):87-89.
[6] 李艳华.危险化学品仓储存在的问题和安全对策[J].工业安全与环保,2009(2):25-27.
[7] 黄凯奇,陈晓棠,康运锋,等.智能视频监控技术综述[J].计算
机学报,2015(6):1093-1118.
[8] 刘学君,江帆,戴波,等.基于ARM的危化品仓库堆垛安全距离监测装置的研究与开发[J].制造业自动化,2016(4):11-14,25.
[9] 刘学君,江帆,戴波,等.基于激光测距仪的危化品仓库堆垛安全距离的网格化监测方案[C]//中国自动化大会,2015:21-50.
[10]徐亦唐.基于最小二乘法的曲线拟合及其在Matlab中的应用[J].电子世界,2013(10):102-103.
[11]陈良波,郑亚青.基于最小二乘法的曲线拟合研究[J].无锡职业技术学院学报,2012(5):52-55.
[12]同济大学数学教研室.高等数学[M].北京:高等教育出版社,2000.
科技论文中文文摘的撰写
摘要是现代科技论文的必要附加部分,只有极短的文章才能省略。它是帮助读者从浩瀚的信息海洋中能较快、较准地找到他们所需要的科技信息的一种有效工具。摘要一般置于作者及其工作单位之后、关键词之前。
根据GB/T 6447-1986《文摘编写规则》关于摘要的定义,摘要是以提供文献内容梗概为目的,不加评论和补充解释,简明、确切地记述文献重要内容的短文。按摘要的不同功能来划分,它大致分为报道性摘要、指示性摘要、报道-指示性摘要3种类型。一般的科技论文应尽可能采用报道性摘要。摘要中应写的内容一般包括研究工作的目的、方法、结果和结论,而重点是结果和结论。根据有关规定,撰写摘要应注意以下几点。
① 省略“我们”“作者”“笔者”“本文”这样的主语。
② 简短精炼,明确具体。简短,指篇幅短,一般以不超过350字为宜(依摘要类型而定);精炼,指摘录出原文的精华,无多余的话;明确具体,指表意明白,不含糊,无空泛、笼统的词语,应有较多而有用的定性和定量的信息。
③ 一般不要交代背景,更不要阐述一般性知识。
④ 格式要规范,一般不分段,尽可能用规范术语,不用非共知共用的符号和术语。不能简单地重复题名中已有的信息,并切忌罗列段落标题来代替摘要。除了实在无变通办法可用以外,一般不出现插图、表格,以及参考文献序号,一般不用数学公式和化学结构式。
Research on the Scan Positioning and Reduction Algorithm for Obstacles in Hazardous Chemicals Warehouse
LIU Xuejun1,LI Jing1,2,LU Hao1,2,DAI Bo1,YUAN Bixian1,2
(1.College of Information Engineering,Beijing Institute of Petrochemical Technology,Beijing 102617,China; 2.College of Information Science and Technology,Beijing University of Chemical Technology,Beijing 100029,China)
Along with the development of modern logistics industry,more and more attention has been paid by people on warehousing security,especially for the storage security of the hazardous chemicals warehouse.Scanning,positioning and reduction processes for the obstacles in hazardous chemicals warehouse are used for displaying accurate digitized information of the position,sixe,and shape of obstacles.In accordance with such information, administrators can make precise judgment on the situation inside warehouse,and take appropriate measures to effectively prevent occurrence of accidents in hazardous chemicals warehouse.In order to conduct scan,positioning and restore the shape and size of the obstacle,the data obtained by the laser scanning device are fitted.Firstly,the laser scanning device is used to scan the scene without obstacle; the scanned data are fitted to establish the normal state.Then,the rectangular obstacle is scanned; the data fitting is conducted for the abnormal points.Finally,the cylindrical obstacle is scanned and the data fitting is conducted for the abnormal points.The experimental results show that with this algorithm the maximum error of the length is less than 0.05m,the image restoration can be better achieved,to meet the monitoring requirement for hazardous chemicals warehouse,the method is economical and practical,and has good application prospects.
Logistics; Warehousing security; Hazardous chemicals; Laser scanning; Obstacle; Least square method; Error
北京市教育委员会科技计划面上项目(15032221001/006)、北京市教育委员会市属高校创新能力提升计划项目(2016014222000041)、北京石油化工学院科技创新资助项目(15031862005/052)、北京石油化工学院优秀青年教师和管理骨干培育计划项目(08031862008/040)、2015年度青年教师科技创新能力提升计划项目(15031862005/052)
刘学君(1977—),男,博士,副教授,主要从事单片机开发和光纤通信方向的研究。E-mail: qinbufei@foxmail.com。
TH-3;TP274+.2
A
10.16086/j.cnki.issn1000-0380.201705021
修改稿收到日期:2016-11-24
猜你喜欢
江苏安全生产(2022年8期)2022-11-01
江苏安全生产(2022年4期)2022-05-23
水上消防(2021年5期)2022-01-18
水上消防(2020年4期)2021-01-04
小天使·一年级语数英综合(2020年11期)2020-12-16
学生天地(2020年34期)2020-06-09
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
小学阅读指南·低年级版(2017年4期)2017-04-24
