
推进器辅助锚泊模式下半潜式平台锚地抗台风能力分析
2017-05-17 13:57余承龙董铁军吴义涛周健伟刘君伟
中国海上油气 2017年3期
余承龙 孙 青 董铁军 吴义涛 周健伟 刘君伟
(1. 中海油田服务股份有限公司物探事业部 天津 300459; 2. 中海油田服务股份有限公司钻井事业部 广东湛江 524057;3. 深圳中海油服深水技术有限公司 广东深圳 518067)
推进器辅助锚泊模式下半潜式平台锚地抗台风能力分析
余承龙1孙 青1董铁军2吴义涛1周健伟1刘君伟3
(1. 中海油田服务股份有限公司物探事业部 天津 300459; 2. 中海油田服务股份有限公司钻井事业部 广东湛江 524057;3. 深圳中海油服深水技术有限公司 广东深圳 518067)
针对半潜式钻井平台在锚地防台风这一特定工况,选取我国南海港外锚地典型海洋环境条件,采用锚泊分析配合平均载荷缩减法,并考虑动力定位系统推进器性能的影响,建立了平台-锚泊系统耦合时域动态分析模型,分析了半潜式钻井平台在浅水海域恶劣海况条件下有无动力定位系统辅助时的锚泊状态,并依据API RP 2SK规范对其综合抗台风能力进行了评价与分析,结果表明推进器辅助锚泊模式可以有效改善锚泊系统受力状况,并显著增强平台综合抗台风能力。本文研究方法及结论可为同时具备锚泊及动力定位系统的浮式结构物在抗台风时的工程设计及实际作业提供参考。
半潜式平台;推进器辅助锚泊;南海港外锚地;抗台风能力;锚泊分析;平均载荷缩减法
由于受到地理位置、地形环境、水文格局以及季风环流等影响,中国南海热带气旋频发且变化多端,生成发展迅速,难以预测,严重影响海洋工程作业安全[1-4]。半潜式钻井平台在该海域锚地防台风过程中,若遭受的海况较为恶劣,极易因锚泊能力不足而发生走锚[5],甚至于出现搁浅、碰撞等严重安全事故。目前深水半潜式钻井平台基本都配备动力定位(Dynamic Positioning,DP)系统[6],因此,半潜式钻井平台在锚地防台设计时不仅要考虑其锚泊系统的定位能力,还要综合考虑DP系统辅助动力定位时的最大抗台风能力,从而确定最佳防台风应急措施。由于推进器辅助锚泊(Thruster Assisted Mooring,TAM)工作模式较为复杂,国内外只有少量的理论和试验研究,且主要针对半潜式钻井平台在1500~3000 m深水海域以锚泊辅助动力定位工作模式,主要探讨其分析方法、失效模式、布置方式、控制策略以及设计方法等[7-14],虽然也有相对成熟的产品应用方案[15],但其解决现场能力不足,实际生产应用较少。
本文在前人研究的基础上,针对半潜式钻井平台在锚地防台风这一特定工况,考虑我国南海港外锚地典型海洋环境条件,采用平均载荷缩减法配合动力学分析,得到了同时具备锚泊与DP系统的半潜式平台在抗台风时的综合定位能力,从而为其在锚地防台方案设计及实际作业中提供参考依据。
1 基础数据及几何模型
1.1 平台主体数据
本次分析所采用的半潜式钻井平台模型总长度为114.07 m,总体宽度为78.68 m,重心高度(距离龙骨基线)为25.20 m,横摇回转半径33.30 m,纵摇回转半径32.40 m,艏摇回转半径35.00 m。2个下部浮体尺寸均为117.04 m×20.12 m×8.54 m,4根立柱高17.39 m、顶部和底部宽度为15.86 m、中部宽度17.39 m,其中心纵向和横向间距均为58.56 m,上部甲板尺寸为77.47 m×74.42 m×8.60 m。平台生存吃水16.00 m,排水量为4.81×107kg。
1.2 锚泊及推进器配置
平台配备84 mm R5级锚链主辅各4根,其干重为1.52×103kg/m,湿重为1.31×103kg/m,最小破断力为8.42×103kN,拉伸刚度为7.13×105kN。锚爪采用的是Stevpris MK5型锚,质量为1.5×104kg,其极限锚固能力可根据Vryhof Anchor B.V.公司所提供的试验结果查询[16]。锚泊系统布置如图1所示,其中锚链顶部预张力为686 kN。DP系统采用8台全回转推进器,每台推进器在静水中最大系桩拉力为784 kN,其布置方式如图2所示。
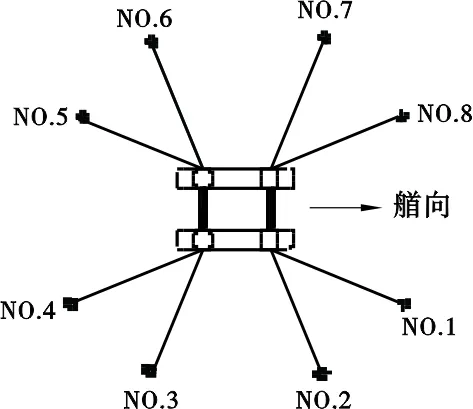
图1 某半潜式钻井平台锚泊系统布置示意图Fig .1 Mooring configuration of one semi-submersible drilling platform

图2 某半潜式钻井平台推进器分布示意图Fig .2 Thruster arrangement of one semi-submersible drilling platform
锚泊系统及推进器系统最终布置方案如表1所示。其中锚泊线方位角为锚链与平台艏向之间顺时针方向上的夹角,锚泊半径为锚爪与导缆器之间的水平距离,出链长度为锚链从主甲板到锚爪之间的长度。预张紧力为686.42 kN。
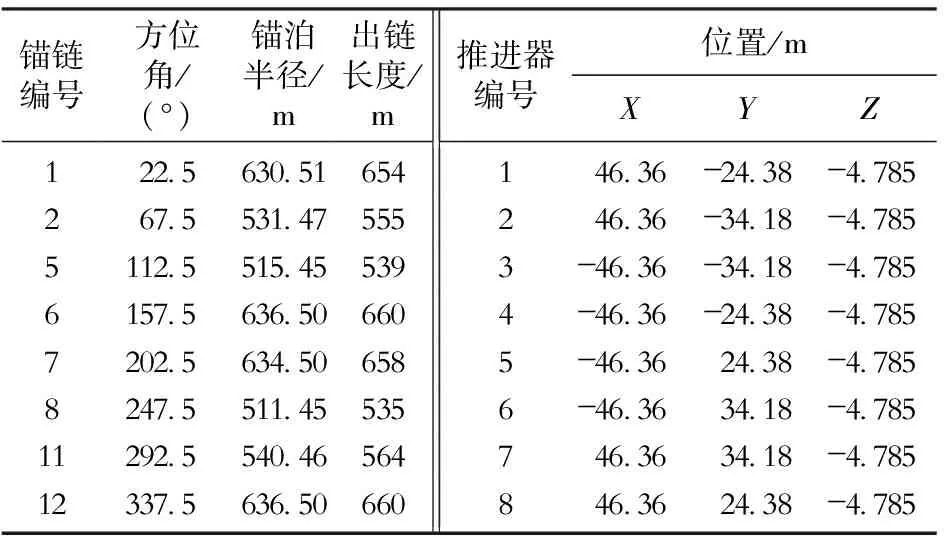
表1 某半潜式钻井平台锚泊及推进器布置情况Table 1 Thruster assisted mooring configuration of one semi-submersible drilling platform
1.3 推进器性能
DP系统推进器效率与推进器类型、布置方式、来流速度以及旋转方向等相关,并且推进器之间以及推进器与船体之间还存在相互干扰;此外,DP系统推进器在锚地浅水区域作业时,还会因浅水效应而存在一定的推力减额。推进器敞水性能曲线如图3所示,推进器在不同旋转方向(推力方向与船艏向顺时针的夹角)上的效率如图4所示。
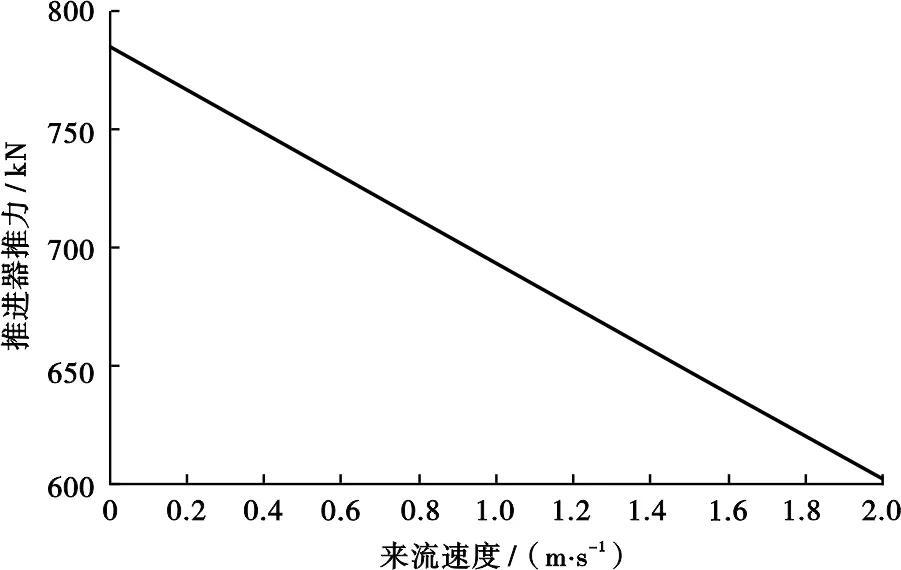
图3 某半潜式钻井平台推进器敞水性能曲线Fig .3 One semi-submersible drilling platform propeller performance curve vs. inflow velocity

图4 某半潜式钻井平台推进器在不同旋转方向上的效率Fig .4 One semi-submersible drilling platform thruster efficiency vs.different thruster headings
1.4 环境条件
港外锚地平均水深30 m,海床平坦,底质以淤泥质为主,表层海流最大流速0.77 m/s,考虑7级以上的风力载荷[17]。浅水海域台风波浪计算较为复杂,本文采用文献[18]根据部分统计资料所得到的经验公式来计算锚地处台风所对应的波浪,并采用JONSWAP谱进行模拟[19]。
2 理论模型
2.1 时域动态分析模型
半潜式钻井平台及其锚泊系统总体运动方程为[20]
(1)
式(1)中:M、Ma分别为平台质量矩阵及附加质量矩阵;C为阻尼矩阵;K为平台系泊刚度矩阵;Fm、Ft、Fw分别表示静态载荷(或平均载荷,包括推进器推力)矩阵、低频载荷矩阵及波频载荷矩阵;x表示系统在t时刻的响应。
平台的波频运动由RAO(幅值响应算子)定义

(2)
式(2)中:X为平台响应(纵荡、横荡、垂荡3个自由度方向上的位移以及横摇、纵摇、艏摇3个自由度方向上的转角);R为RAO幅值;A为波浪幅值;ω为波浪频率;φ为RAO相位;t为时间。
平台所受风力和海流力采用OCIMF公式计算
(3)
(4)
(5)
式(3)~(5)中:Fx、Fy分别为纵荡、横荡方向受力;Mxy为绕垂向轴的艏摇力矩;Ax、Ay、Axy分别为纵荡、横荡方向上受力面积及艏摇面积矩;Cx、Cy、Cxy分别为平台纵荡、横荡方向上受力系数及艏摇力矩系数;ρ为海水或空气密度;V为海流流速或风速。
海流对锚链的作用力采用Morison方程计算,其拖曳力系数取2.4,惯性力系数取2.0。海床与触地链之间的摩擦力采用库伦摩擦计算,摩擦力系数取0.5[21]。
2.2 推进器有效推力计算
平台DP系统所提供的推力由8台推进器共同作用而组成,主要用于抵消稳态荷载,其有效推力及力矩计算公式为
(6)
(7)
(8)
式(6)~(8)中:FTx、FTy、MT分别为纵荡、横荡方向上的合推力及倾覆力矩;β为推进器性能修正系数;Fi为推进器系桩拉力;α为推力方向;n为推进器数目;i为推进器编号,i=1,2,3,…,8;l为推进器与平台稳心之间的垂向距离。
2.3 分析方法及校核准则
假设半潜式钻井平台锚地抗台风期间其锚泊系统及DP系统均完好无损,保持平台艏向不变,时域动态模拟过程中风、浪、流同向,推进器推力方向与之相反。
平台抗台风能力最终由其锚泊系统的锚链张力安全因子FOS(Factor of Safety)、锚爪锚固能力FOS以及触地链长度共同确定。API RP 2SK[8]要求锚链张力FOS≥1.67、锚爪锚固能力FOS≥0.80,且工程中要求大抓力锚不允许承受垂向载荷,即认为触地链长度须大于零。推进器辅助锚泊系统抗台风能力校核准则也与此一致[9],低于极限值即认为发生定位失效。另外,由于台风路径复杂多变,可能发生顺流、转向、原地打转停滞、摆动、回旋跳跃等运动,无法根据台风来向布置平台艏向,因此认为平台实际抵抗台风能力为其定位能力最弱方向的值。
3 锚地抗台风能力分析
3.1 不考虑推进器辅助作用
不考虑DP系统,只有平台锚泊系统单独作用时,该半潜式钻井平台在不同环境载荷方向下的抵抗台风能力如图5所示。由图5a可知,该平台锚泊系统锚链张力FOS在13级台风下部分方向已经低于其极限值,即可认为发生失效;而图5b、c中显示锚爪锚固能力FOS及触地链长度在13级台风下各方向均大于其极限值,超过14级台风时才部分发生失效。由于平台的抗台风能力由锚泊系统最薄弱部分决定,因此认为该锚泊配置下的平台所能抵抗的最大台风等级不超过12级。
通过上述分析可知,该配置下的平台锚泊系统最薄弱部分为锚链,在恶劣海况条件下平台锚泊系统的锚链最先发生失效,因此推进器辅助锚泊分析只需校核锚链张力FOS即可确定平台综合抵抗台风的能力。

图5 某半潜式钻井平台在不同环境载荷方向下 抵抗台风的能力Fig .5 Anti-typhoon capacity of semi-submersible drilling platform in different environmental heading
3.2 考虑推进器辅助作用
3.2.1 推进器许用推力
通常认为相对水深(水深与船体吃水之比)小于3时,须考虑浅水效应的影响[22]。该处锚地相对水深为1.88,浅水效应影响比较显著,依据杨盐生[23]所提出的修正公式,可以计算得出DP系统推进器推力减额系数约为9%。
根据推进器性能以及在各方向的效率,并结合锚地浅水效应,最终计算得到DP系统在各方向上的许用推力如图6所示,可见该配置下的DP系统在横浪方向所能提供的推力最小,在稍微偏离迎浪方向所提供的推力最大,这主要是由于推进器之间的相互干扰引起的。

图6 某半潜式钻井平台DP系统在不同方向上的许用推力Fig .6 Available thrust of DP system under different directions of one semi-submersible drilling platform
3.2.2 最大推力下平台抗台风能力
在TAM模式下,考虑不同环境载荷方向时对应的最大许用推力,绘制平台锚泊系统在不同风力等级时其锚链张力FOS的变化如图7所示。由图7可知,在TAM模式下,平台锚泊系统锚链张力FOS在16级台风时部分方向上已小于其极限值,即可认为平台锚泊系统锚链发生失效,因此该平台在TAM模式下所能抵抗最大台风不超过15级。

图7 某半潜式钻井平台在不同环境载荷方向下 抵抗台风能力(TAM)Fig .7 Anti-typhoon capacity of one semi-submersible drilling platform (TAM) in different environmental heading
平台结构以及锚泊、推进器布置基本呈轴对称结构,且图5及图7也显示平台的抗台风能力在迎浪和横浪方向上基本对称,故选取典型环境载荷方向0°、30°、45°、60°及90°和相应方向推进器最大作用推力,分析有无TAM时锚链张力FOS及平台偏移随风力等级变化情况,具体结果如图8、9所示。可以看出,无TAM作用时,随着风力从7级增至15级,在各环境载荷方向上平台锚泊系统锚链张力FOS减小,平台偏移增大。而考察DP系统输出最大许用推力辅助定位时,为安全起见,从10级台风开始启动DP系统,发现在较小风力等级下锚链张力FOS随风力等级增大而增大,超过一定界限后又随风力等级增大而减小,但平台偏移变化规律正好与之相反。分析认为,这主要是由于在较小风力等级下DP系统所输出的辅助推力相对于环境载荷过大,从而出现过推现象。对比图8可以发现,在风力等级较小时(≤12级),锚泊系统即满足平台抗台风能力要求;而在10~15级台风中,TAM作用可以有效地改善平台的抗台风性能。
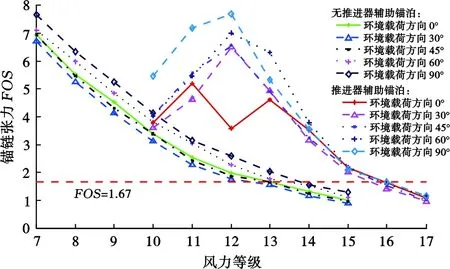
图8 有无推进器辅助时某半潜式钻井平台 抵抗台风能力对比Fig .8 Anti-typhoon capacity of one semi-submersible drilling platform(TAM or none)

图9 有无推进器辅助时某半潜式钻井平台偏移对比Fig .9 One semi-submersible drilling platform (TAM or none) offset comparison in typhoon
3.2.3 推进器辅助锚泊效果
根据平台结构及锚泊、推进器布置,选取典型环境载荷方向0°、45°及90°和相应方向推进器最大许用推力,分析不同风力等级下TAM辅助效果,结果如图10所示。由图10可知,除较小台风外,平台抵抗台风能力均随DP系统输出辅助推力的增大而增大,并且不同等级台风所需的最小辅助推力不同。风力等级较小时,TAM辅助效果显著;而风力等级越大,TAM辅助能力越弱,直至16级台风时超出平台综合抵抗能力,TAM辅助失效。 另外,图11显示了在不同环境载荷方向下相同大小的DP辅助推力对TAM辅助效果的影响(以14级台风为例),尽管在横浪方向上DP所能提供的最大许用推力相对其他方向上较小,但是在相同大小的DP辅助推力下,其TAM辅助效果要较其他方向显著。

图10 不同环境载荷方向下不同台风等级下某半潜式 钻井平台TAM效果Fig .10 Effect of TAM under different heading directions and different wind scale of one semi-submersible drilling platform

图11 不同环境载荷方向下某半潜式钻井平台DP辅助 推力对TAM辅助效果的影响(以14级台风为例)Fig .11 One semi-submersible drilling platform with DP auriliary force influence on the TAM effect (force 14) in different environmental headings
3.3 平台综合抗台风能力
图12为该平台有无TAM辅助作用时在不同环境载荷方向上的综合抗台风能力,这是根据平台各方向最小抗台风定位能力定义的综合抗台风能力。可以看出,无TAM辅助时平台在锚地最大抗台风能力不超过12级,而在TAM辅助时其综合抗台风能力增至15级,这表明在TAM辅助作用下平台锚地综合抗台风能力有了显著提高。

图12 某半潜式钻井平台有无TAM辅助作用时在不同 载荷方向上的综合抗台风能力Fig .12 Anti-typhoon capacity of one semi-submersible platform with TAM or not in different enuironment neadings
4 结论及建议
1) TAM工作模式可以有效改善半潜式钻井平台锚泊系统锚链受力情况,大大提高平台综合抗台风能力。在该目标平台锚泊配置下考虑DP系统推进器辅助作用时,其在锚地所能抵抗台风由最大12级提高至15级,平台综合抗台风能力显著增加。
2) 选择TAM工作模式时,须合理配置DP系统推力,以避免推力过小达不到平台抗台风要求,或者推力过大造成不必要的燃料浪费。
3) 本文TAM辅助分析过程只简单考虑了DP系统恒定推力作用,后续研究建议考虑DP系统与锚泊系统之间的耦合作用,同时考虑台风中风、浪、流方向的多变性、DP系统稳定性等多种危险因素,从而更加符合实际情况。
[1] 韦红术,王荣耀,张玉亭,等.南海深水钻井防台风应急技术[J].石油钻采工艺,2015,37(1):151-153. WEI Hongshu,WANG Rongyao,ZHANG Yuting,et al.Anti-typhoon emergency technology of deepwater drilling in South China Sea[J].Oil Drilling & Production Technology,2015,37(1):151-153.
[2] XU Liangbin,ZHOU Jianliang,LIU Zhengli,et al.Challenges and solutions for deepwater drilling in the South China Sea[R].OTC-23964-MS,2013.
[3] 吴迪生,赵雪,冯伟忠,等.南海灾害性土台风统计分析[J].热带气象学报,2005,21(3):309-314. WU Disheng,ZHAO Xue,FENG Weizhong,et al.The statistical analyse to the local harmful typhoon of South China Sea[J].Journal of Tropical Meteorology,2005,21(3):309-314.
[4] 王友华,王文海,蒋兴迅.南海深水钻井作业面临的挑战和对策[J].石油钻探技术,2011,39(2):50-55. WANG Youhua,WANG Wenhai,JIANG Xingxun.South China Sea deepwater drilling challenges and solutions[J].Petroleum Drilling Techniques,2011,39(2):50-55.
[5] 李阳,张威,谢彬.深水半潜式钻井平台防台措施探讨[J].海洋工程装备与技术,2015,2(6):396-404. LI Yang,ZHANG Wei,XIE Bin.Study on typhoon resistance measures of deepwater semi-submersible drilling platform[J].Ocean Engineering Equipment and Technology,2015,2(6):396-404.
[6] 廖谟圣.超深水钻井平台与超深井钻井设备[C]∥中国石油和石化工程研究会会员代表大会.2008:48-61.
[7] 张本伟,杨清峡,梁园华.半潜钻井平台动力定位与锚泊混合定位控位能力分析方法研究[J].船海工程,2013,42(3):146-149. ZHANG Benwei,YANG Qingxia,LIANG Yuanhua.Research on the mixing positioning capability of dynamic positioning and mooring of semi-submersible drilling rig[J].Ship & Ocean Engineering,2013,42(3):146-149.
[8] American Petroleum Institute.API RP 2SK recommended practice for design and analysis of station keeping systems for floating structures[S].Washington D.C.:API,2005.
[9] American Bureau of Shipping.Guide for the classification notation thruster-assisted mooring for mobile mooring systems[S].Houston,TX:ABS,2013.
[10] 张峰.深水半潜式钻井平台锚泊辅助动力定位系统失效模式影响研究[D].上海:上海交通大学,2013. ZHANG Feng.Study on the impact of failure modes for the mooring assisted dynamic positioning system of a deepwater semi-submersible platform[D].Shanghai:Shanghai Jiao Tong University,2013.
[11] ZHU Jianxun,SUN Liping,LIU Shenggan,et al.Time domain simulation of a one line failure for a DP-assisted mooring system[J].Journal of Marine Science and Application,2014,13(3):321-326.
[12] 张相闻,王磊,李振江,等.锚泊辅助动力定位推进器布置方式分析[J].实验室研究与探索,2013,32(10):7-10. ZHANG Xiangwen,WANG Lei,LI Zhenjiang,et al.On the propeller arrangement manners of the mooring assisted dynamic positioning[J].Research and Exploration in Laboratory,2013,32(10):7-10.
[13] 张炳夫.深水动力辅助锚泊系统联合定位设计研究[D].大连:大连理工大学,2009. ZHANG Bingfu.Design of combinational station keeping system of mooring and DP positioning for deep water platform[D].Dalian:Dalian University of Technology,2009.
[14] 邹刚.基于PID控制的锚泊辅助动力定位系统研究[D].上海:上海交通大学,2014. ZOU Gang.Study on the thruster assisted mooring system based on PID control[D].Shanghai:Shanghai Jiao Tong University,2014.
[15] RICHARD I S,ALLAN M.Design and commissioning of a new thruster assisted mooring system (TAMS) for global producer III[C]∥Annual Conference of the Dynamic Positioning Committee 2007.Houston:Marine Technology Society(MTS ),2010:62-105.
[16] VRYHOF Anchor.Anchor Manual 2015:The guide to anchoring[R].Vryhof Anchors B.V.,Capelle a/d Yssel,The Netherlands 2010.
[17] 中国海洋石油总公司.Q/HS 4021 海上石油设施防台风应急要求[S].北京:中国海洋石油总公司,2010. CNOOC.Q/HS 4021 Typhoon emergency preparedness and response for offshore oil operations[S].Beijing:CNOOC,2010.
[18] 李少英.海湾内台风波浪的分析[J].应用海洋学学报,1996(1):60-66. LI Shaoying.Analysis of typhoon wave within a gulf[J].Journal of Applied Oceanography,1996(1):60-66.
[19] 杨生强.南海北部台风影响下海浪谱研究[D].青岛:中国科学院研究生院(海洋研究所),2015. YANG Shengqiang.Research on the northern South China Sea wave spectrum under the influence of typhoon[D].Qingdao:The University of Chinese Academy of Sciences(Institute of Oceanology),2015.
[20] 罗勇.浮式结构定位系统设计与分析[M].哈尔滨:哈尔滨工程大学出版社,2014:92-93. LUO Yong.Design and analysis of station keeping system for floating structures[M].Harbin:Harbin Engineering University Press,2014:92-93.
[21] TAYLOR R,VALENT P.Design guide for drag embedment anchors[EB/OL].(2017-04-11).https:∥www.researchgate.net/publication/235212390_Design_Guide_for_Drag_Embedment_Anchors.
[22] KUMARPATEL P,PREMCHAND M.Numerical investigation of the influence of water depth on ship resistance[J].International Journal of Computer Applications,2015,116(17):10-17.
[23] 贾欣乐,杨盐生.船舶运动数学模型:机理建模与辨识建模[M].大连:大连海事大学出版社,1999.
(编辑:吕欢欢)
Analysis of the anti-typhoon capacity for semi-submersible platforms with thruster assisted mooring in anchorages
YU Chenglong1SUN Qing1DONG Tiejun2WU Yitao1ZHOU Jianwei1LIU Junwei3
(1.COSLGeophysicalDivision,Tianjin300459,China; 2.COSLDrillingDivision,Zhanjiang,Guangdong524057,China; 3.ShenzhenCOSLDeepwaterTechnologyCo.Ltd.,Shenzhen,Guangdong518067,China)
Based on mooring analysis with a simple mean load reduction method and considering the influence of thruster performance in DP (dynamic positioning) systems, a platform-mooring coupled dynamic response model was established for the specific scenario-typhoon loading of semi-submersible platforms in the typical environmental conditions in outer anchorages of South China Sea. The mooring status of semi-submersible platforms with and without thruster assistance in shallow waters with extreme weather conditions were analyzed, and furthermore, the anti-typhoon capability was evaluated based on API RP 2SK requirements. It was found that the TAM(thruster assisted mooring) could improve the mooring line tension effectively and enhance the anti-typhoon capacity of platforms significantly. The methods proposed here and some conclusions can provide a reference for the anti-typhoon design and operation of floating structures with both a mooring system and a DP system.
semi-submersible platform; thruster assisted mooring; outer anchorage of South China Sea; anti-typhoon capacity; mooring analysis; mean load reduction method
余承龙,男,工程师,2014年毕业于中国石油大学(华东)船舶与海洋结构物设计制造专业,获硕士学位,现从事海洋结构物安全分析与评价工作。地址:天津市滨海新区塘沽海洋高新区海川路1581号(邮编:300459)。E-mail:yuchl9@cosl.com.cn。
1673-1506(2017)03-0131-08
10.11935/j.issn.1673-1506.2017.03.021
TH137
A
2016-12-12 改回日期:2017-02-10
余承龙,孙青,董铁军,等.推进器辅助锚泊模式下半潜式平台锚地抗台风能力分析[J].中国海上油气,2017,29(3):131-138.
YU Chenglong,SUN Qing,DONG Tiejun,et al.Analysis of the anti-typhoon capacity for semi-submersible platforms with thruster assisted mooring in anchorages[J].China Offshore Oil and Gas,2017,29(3):131-138.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
中国水运(2022年7期)2022-08-06
中国海事(2022年2期)2022-03-01
海洋通报(2021年5期)2021-12-21
海洋石油(2021年3期)2021-11-05
全球定位系统(2020年3期)2020-07-15
大陆桥视野·上(2020年4期)2020-05-26
大陆桥视野(2020年4期)2020-05-15
舰船科学技术(2018年8期)2018-09-02
船海工程(2015年4期)2016-01-05
