
深水钻井动力定位平台应急解脱范围分析*
2017-05-17 13:57金学义温纪宏李浪清郭卫华周国林
中国海上油气 2017年3期
金学义 温纪宏 李浪清 郭卫华 周国林
(中海油田服务股份有限公司钻井事业部 河北三河 065201)
深水钻井动力定位平台应急解脱范围分析*
金学义 温纪宏 李浪清 郭卫华 周国林
(中海油田服务股份有限公司钻井事业部 河北三河 065201)
深水钻井动力定位平台在推进器由于失电或自然环境恶劣且超过其能力的情况下,会失去对位置的控制而产生漂移,对正常钻井作业产生重大的影响。基于深水钻井平台隔水管系统挠性接头和伸缩节冲程、隔水管连接器解锁角度、平台应急解脱程序和作业经验,建立了深水钻井动力定位平台应急解脱允许漂移范围的系统计算流程,针对目标平台(1 500 m作业水深的DP3钻井平台)使用ABAQUS软件对LMRP及下BOP组进行建模,并进行了不同工况下的动态分析,结果表明:目标平台在过提711 kN情况下LMRP倾斜6°可完成解锁;在应急解脱前,可用的解脱时间随着蒲福氏等级的增大与水深的减小而降低,海流流速与蒲福等级对平台漂移产生的影响规律相似,海流流速对平台漂移产生的影响较小。
深水钻井动力定位平台;应急解脱范围;解锁角度;漂移分析
深水钻井面临恶劣的环境条件和复杂的作业工况,正常钻井作业过程中深水钻井平台在动力定位系统的作用下保持与海底井口对应位置,以确保隔水管系统的结构完整性及钻井作业的顺利进行。但是在可用的推进器推力小于环境载荷或动力定位 (DP)能力完全失效的情况下,深水钻井平台会发生远离井口的漂移运动[1],漂移过程中如果无法成功实现应急解脱系统 (EDS)的相关工作,可能造成如下问题发生:①钻井作业突然中断导致卡钻等严重的操作问题;②没有正确关闭防喷器、采油树或其他设备导致发生地面或水下井喷事故;③井毁;④钻井隔水管、钻杆折断并坠落至井口、管汇;⑤与邻近的地面或水下的障碍物碰撞;⑥环境污染。因此,对深水钻井动力定位平台应急解脱范围进行分析,合理确定目标平台的解脱范围显得尤为重要。
目前国内外针对深水钻井动力定位平台应急解脱范围分析开展了大量的研究工作,在深水钻井隔水管系统漂移预警界限方面已建立隔水管系统连接作业窗口、悬挂作业窗口和安装作业窗口[2-5],并分析了内波流引起平台漂移对隔水管系统产生的影响[6]及遇台风时平台应急解脱后的撤离分析[7]。在平台漂移方面,根据隔水管系统与水下井口解脱时的物理极限计算平台应急解脱完成时距离设定井位的范围[8],开展了深水钻井平台-隔水管耦合动力学特性及耦合作用规律分析,阐述了漂移预警界限分析方法[9]。本文在已有研究的基础上,提出深水钻井动力定位平台应急解脱范围分析流程,研究确定平台隔水管底部总成(LMRP)解锁所需的最小顶张力及解锁最大角度,以此确定平台漂移分析的边界条件,进而通过漂移分析确定平台应急解脱范围(启动应急解脱与完成应急解脱)。
1 应急解脱范围分析流程
深水钻井动力平台应急解脱范围影响因素与船体结构和平台设备有关,实现解脱功能的EDS反应时间决定漂移时间,同时在不同的作业海域和不同的自然环境条件下,应急解脱范围也不尽相同,具体影响因素如下:
1) 平台设备。包括船体结构、伸缩节、张力器冲程、月池净空尺寸、挠性接头转角、隔水管解锁角度、防喷器(BOP)、井口头强度等。
2) 环境条件。包括水深、风浪流等海况。
3) EDS性能。对于DP定位的深水半潜式平台,当平台失控漂移超过设定范围时,在司钻房或队长办公室触发EDS按钮,即可在设定时间内实现LMRP与下BOP组的解脱。EDS的程序、时间及功能的设定是根据钻井设备、海域等条件的不同而不同,时间设置决定着平台失控后的漂移时间。
从平台结构与设备组成出发,根据影响平台应急解脱范围的因素,提出了深水钻井动力定位平台应急解脱范围分析流程(图1)。其中,防喷器有限元分析须对LMRP、下BOP组进行建模,并细化各插入头在该模型中的作用;进行LMRP解锁角度分析,主要考虑顶张力及解锁角度的影响,通过分析确定最小顶张力下的最大解锁角度,即解锁极限,该极限角度与伸缩节和张力器冲程、月池净空尺寸、挠性接头转角、BOP和井口头强度等一起作为平台漂移分析的边界条件,通过分析不同工况下的漂移分析,从而确定应急解脱范围。

图1 深水钻井动力定位平台应急解锁范围分析流程Fig .1 Flow chart of dynamically positioned platforms in deep water drilling operations emergency disconnect range analysis
2 应急解脱范围的确定
以某作业水深1 500 m的DP3钻井平台为研究对象。
2.1 LMRP解锁角度分析
2.1.1 LMRP有限元分析模型的建立
采用ABAQUS[10]对LMRP解锁进行建模分析。
1) 几何模型。LMRP解锁最大角度的确定应建立在不损坏设备的基础上,因此,采取LMRP与下BOP组整体建模并进行有限元分析,通过对阻流插入头、压井插入头、乙二醇插入头和声呐插入头及导向桩等关键结构进行细化,建立LMRP与下BOP组连接的三维模型。在进行网格离散时,分别采用C3D10M、C3D8R、C3D4、C3D6、C3D8单元。几何网格模型如图2所示。

图2 目标平台LMRP解锁有限元分析模型Fig .2 Target platform LMRP disconnect analysis FEA model
2) 材料模型。根据建立模型的部件可变形性进行以下假设:①下BOP组总成不变形;②BOP连接短节不变形;③隔水管连接器不变形。
3) 边界载荷条件。边界条件为BOP连接短节底部进行固定,各插入头及导向桩底部纵向固定,即U2=0,如图3所示。为了确定LMRP解锁的最大角度及同时需要的最小顶张力,载荷条件包括3个方面:① 重力载荷Agravity=9.8 m/s2;②隔水管连接器顶部总张力FT倾斜角度后的纵向分力FTY;③隔水管连接器顶部总张力FT倾斜角度后的横向分力FTZ。所建立的载荷模型如图4所示,总体施加载荷包括LMRP提起需要的力与过提力之和,此过提力也作为有限元分析的输出结果,LMRP提起所需载荷等于LMRP分析模型重量外加一定比例的附加重量。
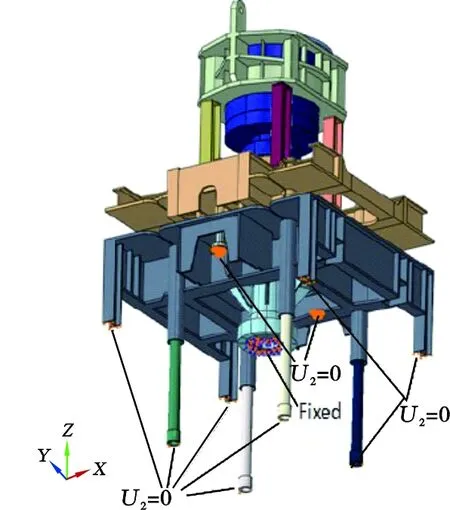
图3 目标平台LMRP解锁分析边界条件模型Fig .3 Boundary conditions of LMRP disconnect analysis model of the target platform
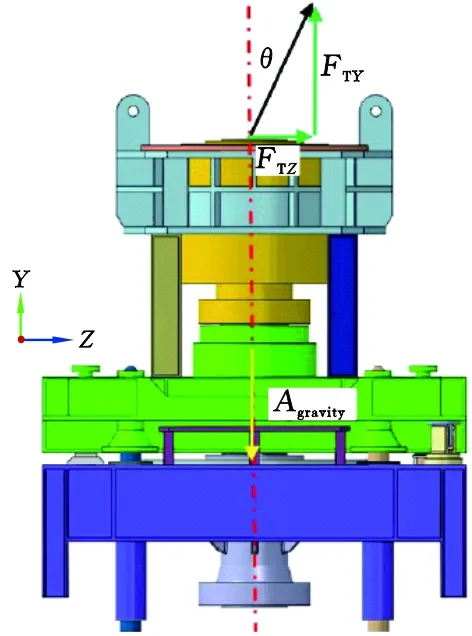
图4 目标平台LMRP解锁分析载荷模型Fig .4 Load model for LMRP disconnect analysis of the target platform
鉴于LMRP解锁过程中受到下BOP组不断变化的接触界面作用,分析采用显式积分动态解决方案,考虑LMRP在空间移动的动能。显式积分方案须使用临界时间分析步才能稳定,而临界时间步长是材料最小特征元素长度和膨胀波速度的函数。由于临界时间步长极小,并且应力场需要精确捕捉,LMRP解锁分析的整体时间设定为0.3 s。
载荷在一定时间内施加到模型上,以保证在解脱分析中捕捉到实时的情况。重力加速度在分析开始时(0 s)施加在整个模型上。顶张力引起的横向载荷呈直线增加,并在0.000 01 s全部施加到模型上,从0.000 01~0.001 00 s,垂向载荷呈直线上升,可得到最快、最精确的载荷。
2.1.2 解锁角度分析
通过在Y-Z与X-Z平面施加顶张力及不同角度工况进行分析,得出在最小过提力711 kN,最大解锁角度6°的情况下,LMRP可满足各工况下的安全解锁。本文只提取在最小过提力711 kN和最大解锁角度6°工况下的有限元分析结果,如图5所示。由图5可知,Y-Z平面峰值应力出现在阻流插入头与母头接触边缘,不影响使用,峰值应力是由角度引起的弯矩导致,应力小于屈服强度345 MPa;X-Z平面峰值应力出现在乙二醇插入头与母头接触边缘,不影响使用,抛出该峰值应力,应力均小于屈服强度517 MPa,满足要求。

图5 目标平台LMRP解锁分析结果Fig .5 LMRP disconnect analysis results of the target platform
2.2 漂移分析
使用的基础数据包括:①DS激活后,12 s完成LMRP解锁(不包括反应时间);②月池净空尺寸为24.2 m×8.7 m;③LMRP在6°前须完成解锁(下挠性接头角度);④上挠性接头角度为15°;⑤伸缩节、张力器中冲程为7.62 m;⑥作业吃水为17.50 m,生存吃水为15.50 m;⑦横荡惯性力系数为2.06;纵荡惯性力系数为1.29;垂荡惯性力系数为2.16;⑧平台质量为40 848×107kg;⑨上挠性接头转动刚度为12.9 kN·m/(°),下挠性接头转动刚度为92.0 kN·m/(°)。应用Deepriser软件,针对目标平台在水深300~1 500 m的平台-隔水管系统进行分析。表1为目标平台开展平台漂移分析时的海况条件。
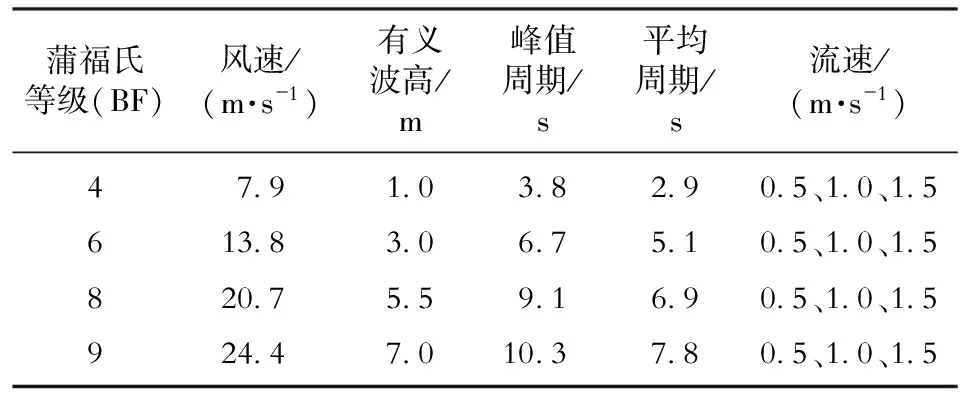
表1 目标平台漂移分析时海况条件Table 1 Target platform drift analgsis sea condition
通过分析,得出不同工况(蒲福氏等级)下的漂移范围、漂移时间与解锁角度(流速=1.5 m/s,图6),同时对不同流速下的漂移范围、漂移时间与解锁角度(BF9)进行了对比分析(图7),获得以下认识:
1) 在应急解脱前,所允许的漂移范围随着蒲福等级的增大而减小,随着水深的增加而增大;对于解锁时间、解锁角度,则随着蒲福等级的增大而降低,随着水深的增加而增大,但变化逐渐平缓。
2) 海流流速与蒲福等级对平台漂移产生的影响规律相似,但对比可以看出,海流流速对平台漂移产生的影响较小。
3) 对于水深较浅的海域,由于解锁角度较小,允许的漂移范围窗口较窄,反应时间较短,因此,在浅水作业须对操作程序、人为因素进行考虑以合理确定允许的漂移范围,建议在此区间将EDS设为自动。

图6 不同工况下目标平台应急解脱范围对比Fig .6 Drift-off comparisons under different conditions

图7 不同流速下目标平台应急解脱范围对比Fig .7 Drift-off comparisons under different flow
3 结论与建议
1) 本文建立了深水动力定位平台应急解脱范围分析流程,并针对目标平台开展了实例分析。使用ABAQUS软件对目标平台的LMRP及下BOP组进行建模,通过不同工况下的动态分析,得出该平台在过提711 kN情况下LMRP倾斜6°可完成解锁;在应急解脱前,可用的解脱时间随着蒲福氏等级的增大与水深的减小而减少,海流流速与蒲福等级对平台漂移产生的影响规律相似,但海流流速对平台漂移产生的影响较小。
2) 为了防止EDS系统失效(无法启动、启动后未实现LMRP解锁),建议增加自动解脱系统(ADS)。由于ADS设置的解锁角度大于EDS解锁角度,在EDS失效后可以作为补充实现LMRP自动解锁,从而保证深水钻井动力定位平台系统的安全。
[1] WANG Sue,LU Ping. Advanced computing technologies facilitate operations of dynamically positioned vessels[R].Twenty-fifth (2015) International Ocean and Polar Engineering Conference.Kona,Big Island,Hawaii,USA,2015.
[2] PAULA J R R,FONSECA D R.Emergency disconnection guidelines[R].Offshore Technology Conference,2013.
[3] 鞠少栋,畅元江,陈国明,等.深水钻井隔水管连接作业窗口分析[J].石油勘探与开发,2012,39(1):105-110.. JU Shaodong,CHANG Yuanjiang,CHEN Guoming,et al.Envelopes for connected operation of the deepwater drilling riser[J].Petroleum Exploration and Development,2012,39(1):105-110.
[4] 鞠少栋,畅元江,陈国明,等.深水钻井隔水管悬挂窗口确定方法[J].石油学报,2012,33(1):133-136. JU Shaodong,CHANG Yuanjiang,CHEN Guoming,et al.Determination of the hang-off window for deepwater drilling riser[J].Acta Petrolei Sinica,2012,33(1):133-136.
[5] WANG Y B,GAO D L,FANG J.Mechanical behavior analysis for the determination of riser installation window in offshore drilling[J].Journal of Natural Gas Science and Engineering,2015,24:317-323.
[6] 王荣耀,刘正礼,许亮斌,等.内波作用下深水钻井隔水管系统作业安全评估[J].中国海上油气.2015,27(3):119-125.DOI:1011935/j.issn.1673-1506.2015,03.019. WANG Rongyao,LIU Zhengli,XU Liangbin,et al.Assessment on operation safety of deep water drilling risers in soliton environment[J].China Offshore Oil and Gas.2015,27(3):119-125.DOI:1011935/j.issn.1673-1506.2015,03.019.
[7] 许亮斌,周建良,王荣耀,等.南海深水钻井平台悬挂隔水管撤离防台分析[J].中国海上油气,2015,27(3):101-107.DOI:10.11935/j.issn.1673-1506.2015.03.016. XU Liangbin,ZHOU Jianliang,WANG Rongyao,et al.Analysis of deep water drilling platform evacuation from imminent typhoons with riser hanging-off in the South China Sea [J].China Offshore Oil and Gas,2015,27(3):101-107.DOI:10.11935/j.issn.1673-1506.2015.03.016.
[8] 寇贝贝,刘正礼,姜清兆,等.深水钻井动力定位平台允许漂移范围分析[J].石油钻采工艺.2015,37(1):36-38. KOU Beibei,LIU Zhengli,JIANG Qingzhao,et al.Analysis on allowable drift ranges of deepwater drilling dynamic positioning platform[J].Oil Drilling & Production Technology,2015,37(1):36-38.
[9] 刘秀全,陈国明,畅元江,等.深水钻井平台-隔水管耦合系统漂移预警界限[J].石油勘探与开发,2016,43(4):641-646. LIU Xiuquan,CHEN Guoming,CHANG Yuanjiang,et al.Drift-off warning limits for deepwater drilling platform/riser coupling system[J].Petroleum Exploration and Development,2016,43(4):641-646.
[10] YEOH O H.Plastics and rubber processing and applications[M].London:Applied Science Publishers,1984.
(编辑:叶秋敏)
Analysis of the emergency disconnection range of dynamically positioned platforms in deep water drilling operations
JIN Xueyi WEN Jihong LI Langqing GUO Weihua ZHOU Guolin
(COSLDrillingDivision,Sanhe,Hebei065201,China)
Dynamically positioned platforms for deep water drilling will be out of control and drift in the cases of electricity outage or adverse natural conditions exceeding the DP (dynamic position) capacity, which will cause serious impact on the normal drilling operations. Based on the flexible joint angle, slip joint stroke, riser connector disconnection angle, EDS (emergency disconnection system) procedure, and operation experiences, the systematic procedures for calculating the allowable drift-off range of dynamically positioned platforms were established. The analysis model of LMRP and the lower BOP stack for the drilling platform in question (1 500 m rated DP3) were established with ABAQUS software. The results of dynamic analysis under different conditions shows that LMRP can be disconnected at 6 degrees under overload of 711 kN. With increasing Beaufort scale level or decreasing water depth, drift-off limited time for drilling platforms decreases. Current velocity has similar but lower influence than Beaufort scale level.
dynamically positioned drilling platform; emergency disconnection range; disconnection angle; drift-off analysis
金学义,男,工程师,2001年毕业于西南石油大学,主要从事水下及井控装备管理工作。地址:河北省三河市燕郊经济技术开发区海油大街201号钻井事业部(邮编:065201)。 电话:010-84528471。E-mail:jinxy5@cosl.com.cn。
1673-1506(2017)03-0116-06
10.11935/j.issn.1673-1506.2017.03.019
TE52
A
2016-10-31 改回日期:2016-12-12
*国家重点基础研究发展计划(973计划)“海洋深水油气安全高效钻完井基础研究 (编号:2015CB251200) ”部分研究成果。
金学义,温纪宏,李浪清,等.深水钻井动力定位平台应急解脱范围分析[J].中国海上油气,2017,29(3):116-121.
JIN Xueyi,WEN Jihong,LI Langqing,et al.Analysis of the emergency disconnection range of dynamically positioned platforms in deep water drilling operations[J].China Offshore Oil and Gas,2017,29(3):116-121.
猜你喜欢
化工管理(2022年14期)2022-12-02
海洋石油(2021年3期)2021-11-05
舰船科学技术(2021年12期)2021-03-29
课堂内外(小学版)(2021年3期)2021-01-17
小哥白尼(趣味科学)(2019年5期)2019-08-27
当代陕西(2019年8期)2019-05-09
特别文摘(2018年6期)2018-08-14
小太阳画报(2018年8期)2018-05-14
船海工程(2015年4期)2016-01-05
中国水运(2015年5期)2015-07-13
