风电机组转子惯性控制调频技术研究
2017-05-15 01:49:38彭超代海涛王小虎潘海宁
风能 2017年1期
文 | 彭超,代海涛,王小虎,潘海宁
风电机组转子惯性控制调频技术研究
文 | 彭超,代海涛,王小虎,潘海宁
风力发电为新能源发展最快、最具竞争力的发电技术。截至2015年底,风力发电提供了全球约3.7%的电力需求,中国已然成为世界第一风力发电大国,风力发电量占国内全部发电量的比例达到3.3%。2016年4月22日,国家能源局下发《关于建立燃煤火电机组非水可再生能源发电配额考核制度有关要求的通知》,提出燃煤火电机组均应承担可再生能源发电的配额责任,2020年各燃煤发电企业承担的可再生能源发电量配额,与火电发电量的比重应在15%以上。可以预见,风力发电仍将有巨大的市场空间。
受气候条件限制,风力发电输出功率具有间歇性和随机性的特点。大规模风力发电接入对电力系统的稳定运行提出了挑战。为保证电力系统安全可靠运行,风电越来越被认为需要具备系统频率调节功能。
本文首先简述了风力发电调频技术,然后基于SIMPACK-Simulink联合仿真方法,分析了风电机组采用转子惯性控制方法参与一次调频的动力学响应,为风电机组参与一次调频的可行性提供技术支撑。
风力发电调频技术
目前的风电机组主要有双馈型和直驱型两种,由于电力电子变流器的作用,变速机组的转子与系统频率解耦,无法在系统频率变化时主动提供惯性支撑。而且,风电机组大都采用最大风能捕获控制,运行于最大功率点附近,无法提供调频所需的备用容量,尤其是在向上调节时。
不过,通过调节风电机组的控制,可以使得机组具备惯性响应和频率调节能力。目前,主要通过转子惯性、超速和变桨方式进行有功功率控制。
转子惯性控制是在风电机组运行过程中,接收电力系统的调频指令,临时改变发电机转矩控制,使得叶轮转速变化,在短时间内吸收/释放机组传动链中储存的部分旋转动能,提供类似于传统机组的转动惯量。
转子超速控制是控制叶轮超速运行,使风电机组偏离最大功率捕获点,提供一定容量的有功功率备用。超速控制仅适用于额定风速以下的运行工况。
变桨控制是通过控制叶片的桨距角偏离最优点,使风电机组处于最大功率点以下运行,从而留出一定的备用容量。一般情况下,变桨控制多用于额定风速以上的工况。
转子超速控制和变桨控制都会使得机组长期偏离最大功率点运行,牺牲发电量和经济效益。转子惯性控制为临时性控制措施,对发电量的影响较小。
转子惯性控制调频
当电力系统受机组脱网、线路故障、负荷突变等扰动,频率发生变化时,临时性动态调整风电机组的有功功率。

式中:Δf ——系统频率偏差;ΔP ——风电机组有功功率增量;Kpf——频率偏差的权重系数;Kdf——频率偏差微分的权重系数。
在发电机转矩控制上增加一个增量:

式中:ωg——发电机转速;ΔT ——发电机转矩增量。
为确定机组参与系统调频所需备用容量,设定机组减载水平为η。结合常规发电机组静调差系数的定义,减载水平为:

式中:P0——风电机组额定功率;f*——系统频率;σf——静调差系统。
电力系统频率需保持在50Hz上下,偏移一般不超过±0.2Hz,静调差系数一般为3%-5%。由式(3)可得减载水平为8%-13%,可设定双馈感应式风电机组减载水平为10%。
动力学-控制联合仿真
一、建模
基于SIMPACK-Simulink联合仿真,分析双馈风电机组采用转子惯性控制参与一次调频的动力学响应。
SIMPACK是出自德国宇航局的通用多体动力学仿真软件,在风电机组动力学仿真方面应用普遍。采用专用模块“RotorBlade Generation”生成弯扭耦合的柔性叶片,基于梁单元生成塔筒柔性体模型,以刚性传动比简化齿轮箱,通过接口力元调用NREL开发的AeroDyn气动力计算程序,执行叶片气动力计算。风电机组多体动力学模型如图 1所示。
在Simulink中建立风电机组控制器模型,包括发电机转矩控制和叶片桨距角控制。发电机转速与设定值的偏差作为输入,经转矩PI模块后,输出发电机转矩;经桨距角PI模块后,输出叶片桨距角。风电机组处于额定功率以下运行时,转矩控制模块启用;处于额定功率以上时,桨距角控制模块启用。
在上述控制器基础上,引入式(1)所示转子惯量控制算法,如图 2所示。
通过SIMAT接口,执行SIMPACK与Simulink之间的数据交互,实现联合仿真。
二、稳态风况仿真
以某2MW机组为例进行仿真。该机组发电机切入转速为1000rpm,额定转速为1780rpm,切入风速为3m/s,额定风速为10m/s。
假定电力系统在某时刻后的1s内频率下降0.2Hz,并持续10s,之后经过1s恢复,如图 3所示。
首先仿真5m/s稳态风作用下,系统频率下降后机组临时增发10%功率。从250s开始电力系统频率下降,12s后频率恢复。发电机转矩、转速、机组输出功率的动态响应如图 4、图 5、图 6所示。
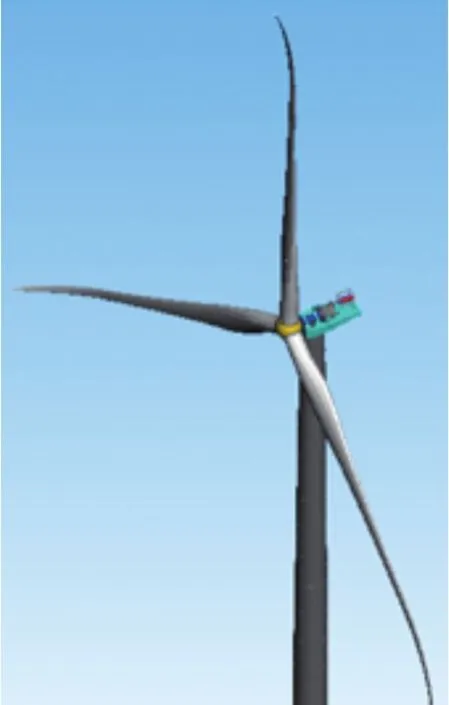
图1 多体动力学模型
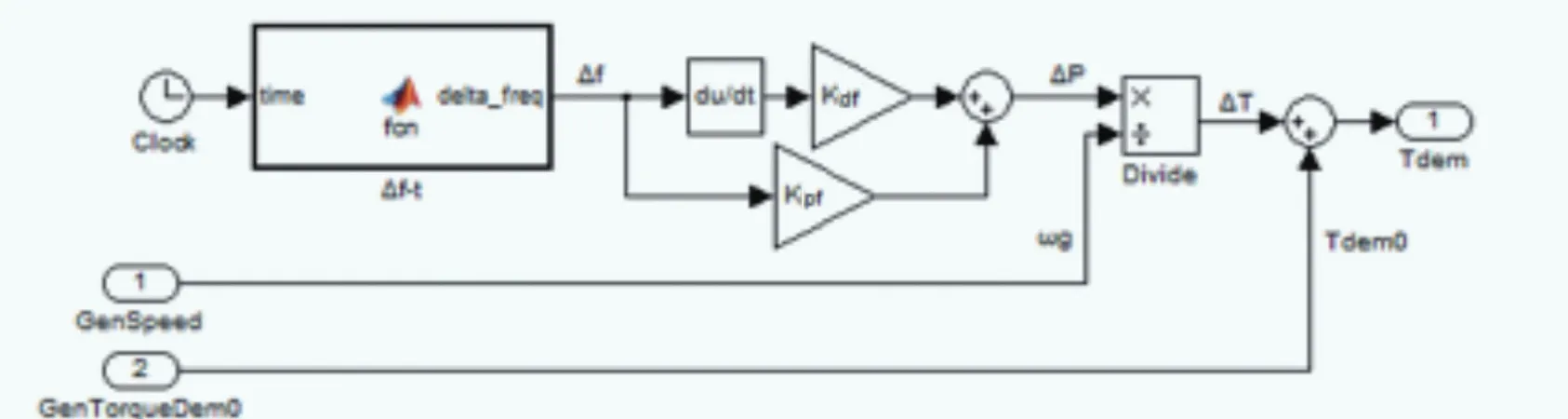
图2 转子惯量控制
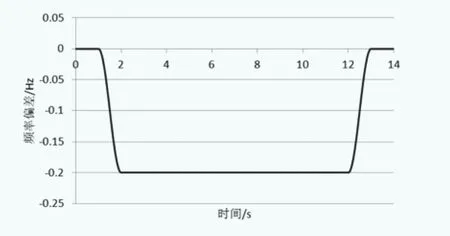
图3 系统频率偏差
由仿真结果可知,在第250s系统频率逐渐下降0.2Hz,发电机转矩上升,转速下降。有功功率输出由262kW提高至最高293kW,上升幅度11.8%,超过了给定的10%。这是因为根据式(1),有功功率的增量不仅包含了频率偏差Δf的比例项,还包含了频率偏差的微分的比例项。
即使在稳态风下,系统频率下降,发电机功率快速增加至最高点后,并没有保持在稳定值,而是逐渐下降(251s-261s)。这是因为临时改变发电机转矩控制输出,使得机组偏离了最大功率点运行,Cp系数减小,降低了风轮的一次能量捕获效率。时间越长,偏离最大功率点越远,Cp系数也越低,导致发电机功率输出下降。

图4 发电机转速
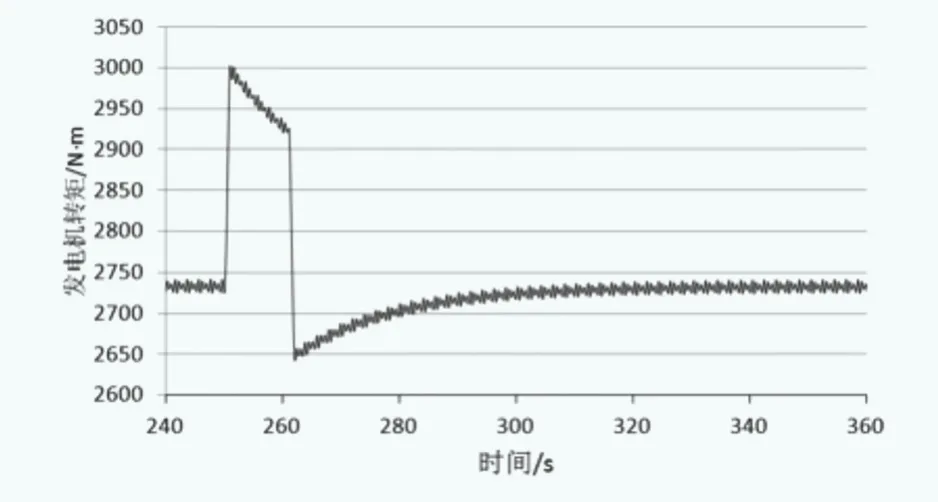
图5 发电机转矩
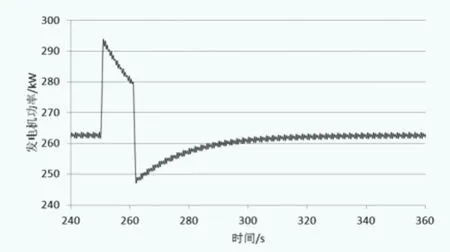
图6 发电机功率
在第261s-262s,系统频率逐渐恢复,发电机功率大幅下降,这种情况下极易导致系统频率二次下降。之后,发电机转速、转矩和功率逐渐向最优运行点靠拢,历时大约60s后恢复。
三、湍流风况仿真
仿真湍流风作用下,系统频率下降后机组临时增发10%功率的动力学响应。轮毂高度处平均风速为5m/s,湍流强度29.9%,如图 7所示。
从250s开始电力系统频率下降,12s后频率恢复。发电机转矩、转速、机组输出功率的动态响应如图 8、图 9、图 10所示。为了便于分析比较,一并给出不考虑转子惯性控制调频时的动态响应曲线。
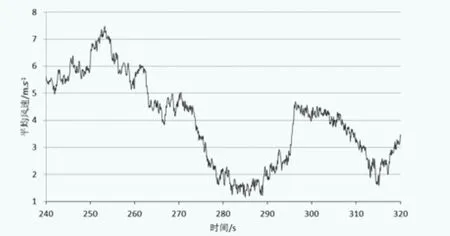
图7 轮毂高度处平均风速
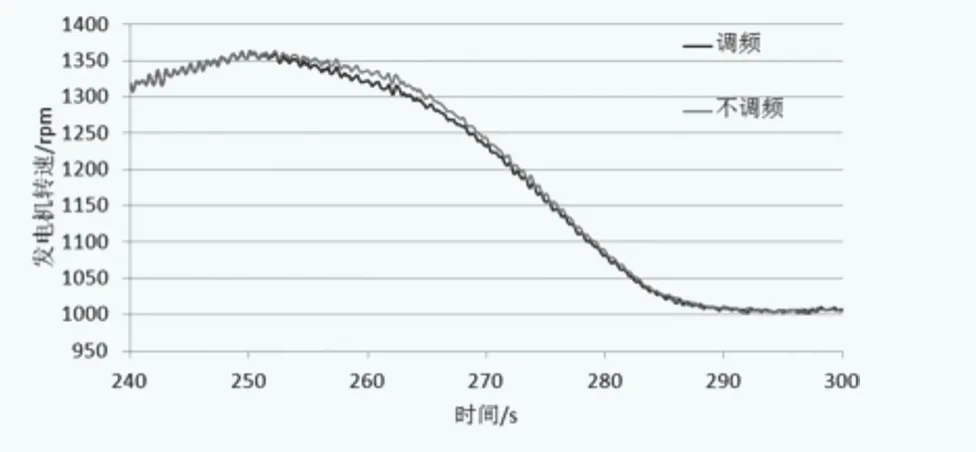
图8 发电机转速
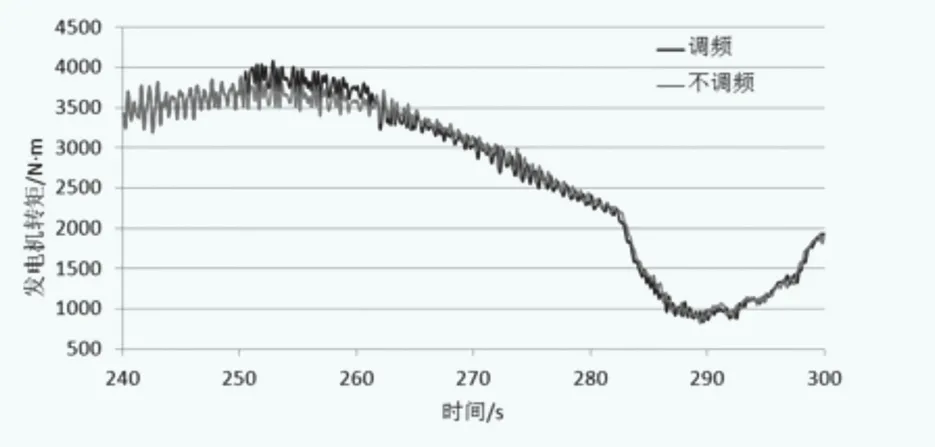
图9 发电机转矩
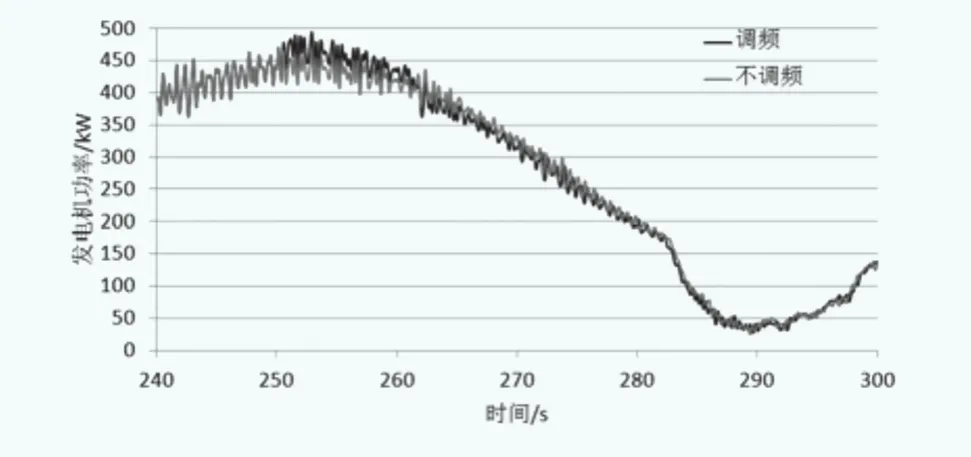
图10 发电机功率
由仿真结果可知,在第250s系统频率逐渐下降后,发电机转矩上升,转速下降,功率上升。在第262s系统频率恢复后,发电机转矩、转速和功率有一个较小的波动,之后历时大约25s逐渐恢复至正常水平。
总体上,湍流风下转子惯性控制能及时响应系统的调频需求,且对发电机转矩、转速和功率的影响较小。
结论
(1)简述了目前风电机组主流的调频技术:转子惯性控制、超速控制和变桨控制。
(2)采用转子惯性控制方法,基于SIMPACK-Simulink联合仿真,分析了5m/s稳态风和湍流风下风电机组参与一次调频的动态响应。结果表明,电力系统频率下降0.2Hz并持续10s,风电机组能及时响应电力系统的调频需求,保持发电运行,且系统恢复后,机组可以快速恢复至原先的正常发电水平。
(3)本文在风电机组参与电力系统一次调频的技术可行性方面做了一些探索,为进一步的研究奠定了基础。
(作者单位:国电联合动力技术有限公司)

摄影:陈裕法
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:16
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:06
能源工程(2021年5期)2021-11-20 05:50:42
四川冶金(2018年1期)2018-09-25 02:39:26
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:23
小学科学(学生版)(2016年1期)2016-10-09 01:53:02
通信电源技术(2016年1期)2016-04-16 04:57:26
西部广播电视(2015年9期)2016-01-18 03:46:07
西部广播电视(2015年9期)2016-01-18 03:46:04
电机与控制应用(2015年3期)2015-03-01 03:49:59