
基于群集蜘蛛算法的神经网络控制器研究
2017-05-15 02:35:16孟昕元
微特电机 2017年9期
孟昕元,范 峥
(河南工学院,新乡453002)
0 引 言
他励直流电动机调速系统以起动转矩大、调速范围宽广等优势在工业生产中应用广泛,如:机械加工,起重机,卷扬机,机械设备等。其中某些场合,需要直流电机工作于额定转速之上。在电枢电压已达到最大值,还要求提升电机转速的情况下,需用弱磁调速来实现[1]。此时电机转矩是磁通和电枢电流的乘积、反电势是磁通和速度的乘积,直流调速系统将是非线性的[2]。
传统的他励直流电动机调速原理如图1所示。其中nr,vfr,n分别为转速设定值、励磁电压设定值与转速实际值。使用两路独立的PI控制器分别对电枢回路和励磁回路进行控制,通过调节电枢电压va和励磁电压vf,可以实现直流电机调速。多数情况下,电机工作于额定转速之下,此时励磁电压vf保持恒定,调节电枢电压va即可实现调速。在要求电机转速超过额定转速的情况下,须使用弱磁控制方法。减小励磁电压vf,励磁电流if随之下降,电机气隙磁通量下降,反电势减小,电机电枢电流增加,致使电机转速上升。此时电机转矩下降,电机转轴功率保持恒定。

图1 传统弱磁控制原理框图
常规的弱磁控制器结构比较复杂,要将额定转速上下分开考虑,用开关装置切换,容易使系统转速过渡不平滑。另外,这种控制方法需要以励磁电流if和反电势ea作为反馈量,实践中易造成系统鲁棒性下降。
1 神经网络控制方式
用神经网络控制器实现他励直流电机弱磁调速的原理如图2所示。使用神经网络对励磁电压vf的占空比(D)进行预测与控制,来提供所需的励磁电流if[3]。

图2 神经网络弱磁控制原理框图
人工神经元的结构来自于生物神经元概念。神经网络可以完成静态或动态的输入输出映射。神经网络的一个重要特征是它需要通过输入输出示例数据集来进行监督训练或学习过程,这一点与常规的数字计算机编程有很大的不同。在学习过程中,神经网络调整自身结构来实现与管理者一样的输出信号。学习过程将会一直重复直至网络输出与管理者之间的差距满足要求。一个人工神经元的基本模式包括了一个加权加法器和一个激励函数(或传递函数),如图3所示。

图3 单个人工神经元基本模型
图3 中:x1,…,xi为输入;wj1,…,wji为权重;bj为偏置;fj为激励函数;yj为输出。
权重和:

激励函数的拉氏变换式形式如下:
前馈网络是由单个神经元按照突触连接的方式组成的网络。图4给出了一个3层前馈神经网络。

图4 3层前馈神经网络
2 他励直流电机的数学模型
他励直流电机等效电路如图5所示,数学模型如下[4]:
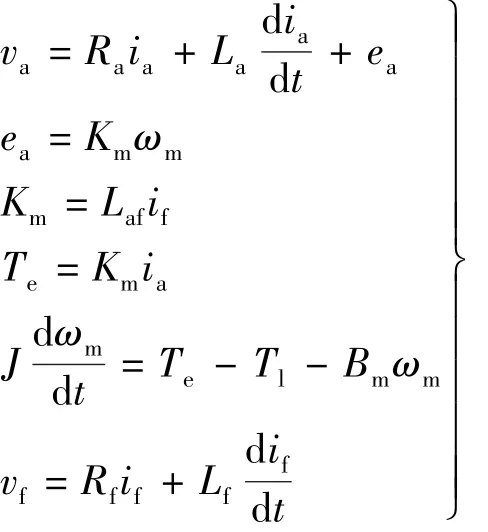
式中:va和vf分别是加在电枢和励磁绕组上的电压;ea是电枢绕组的反电动势;Ra和Rf分别是电枢电阻和励磁绕组电阻;La和Lf分别是电枢电感和励磁绕组电感;ia和if分别是电枢电流和励磁绕组电流;Laf是互感;Km是电机常数;ωm是电机转速;Te是电机电磁转矩;J是电机转动惯量;Bm是电机粘滞摩擦系数;Tl是负载转矩。
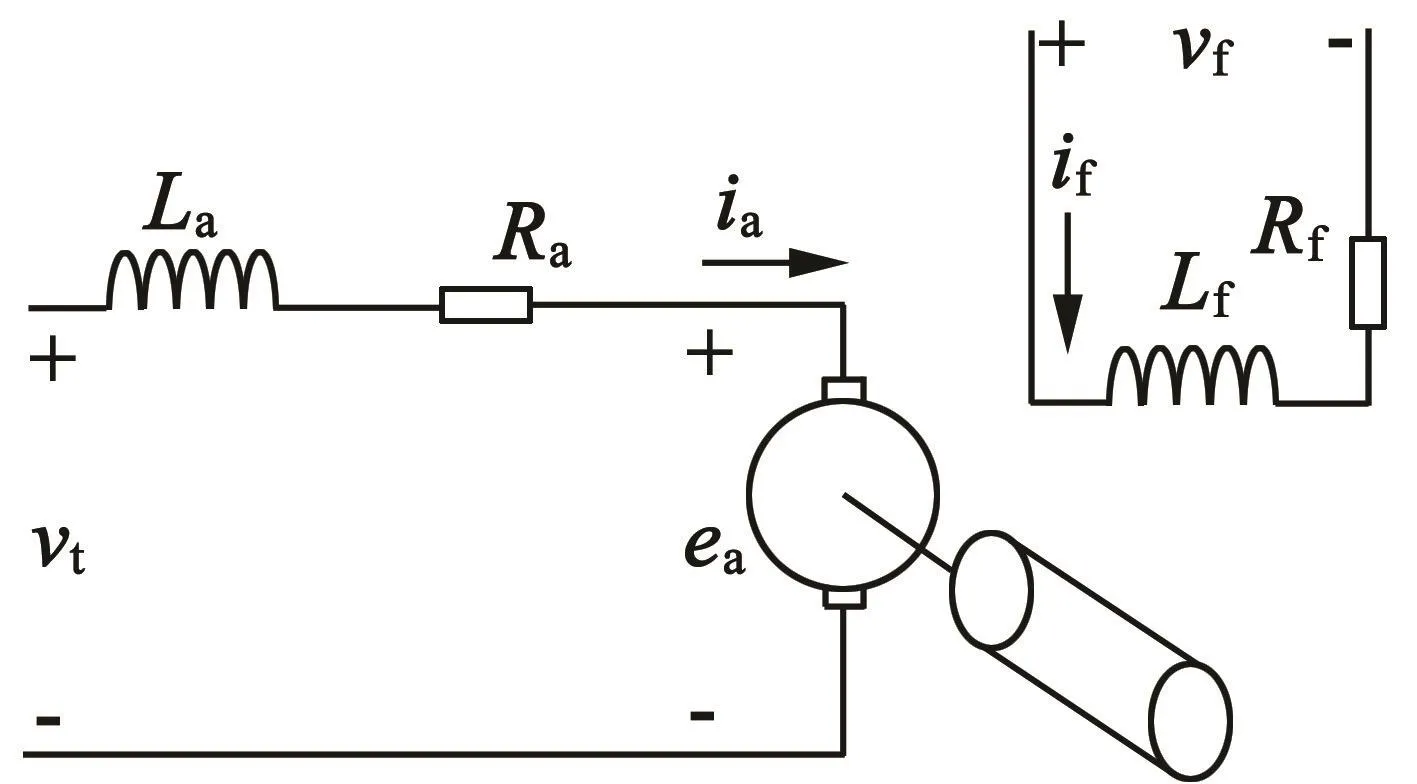
图5 他励直流电动机等效电路图
3 群集蜘蛛优化算法
群体智能是一种新型的进化技术,近年来吸引了很多研究者的关注[5-6]。群体一词用来指代相互作用的媒介的任意集合。通过模拟蚂蚁、蜜蜂、细菌、萤火虫等生物的行为,研究者创立了优化算法。自我组织、协同分工群体智慧的基本组成形式。
自我组织系统意味着:系统内每一个涉及到的单元会成为独立的局部刺激者,并且可能与周围其他单元协同工作以完成一个全局性的任务,这种协同的分工方式是在没有局部监督者的情况下主动完成的。这将使得整个系统有效地适应来自内部和外部的变化[7]。群体算法是在多种方法的基础上建立。这些方法包括:基于鸟类群居群集行为的粒子群算法(PSO)[8];基于蜂群合作行为的人工蜂群技术(ABC)[9]。
群集蜘蛛优化算法(SSO)假设整个搜索空间是一个群体网络,所有的群集蜘蛛能互相反应。搜索空间中的每一个解决方案用一个公共网络中的蜘蛛位置来表示。每一个蜘蛛接收一个与群集蜘蛛知识的解决方案适合值相联系的权重。这个算法假设两种不一样的搜索媒介:公蜘蛛和母蜘蛛。取决于性别,每一个人表现为一个不同的进化算子集合,这些进化算子模拟了族群中普遍认可的不同的共性行为。群集蜘蛛优化算法(SSO)的计算步骤可以抽象为如下所述[7]:
1)假设n维族群的全部个体数量为N,定义公蜘蛛和母蜘蛛的数量分别为Nm和Nf,整个族群集合定义为S;

2)随机初始化母蜘蛛集合(F={f1,f2,…,fnf})和公蜘蛛集合(M={m1,m2,…,mNm})中的个体,其中:S={s1=f1,s2=f2,…,sNf=fNf,sNf+1=m1,sNf+2=m2,…,sN=mNm}。
每个个体的适应度:


3)计算集合S中每一个蜘蛛的权重如下:
式中:J(si)是由蜘蛛位置 si决定的适合值;bs=
4)按照母蜘蛛合作算子移动母蜘蛛
宗派网络是在族群个体之间传递信息的技术。这个信息按照小振动的方式编码,每个振动依赖于产生它的蜘蛛自身权重和距离。
有两种类型的振动:
a)Vibci是个体c(sc)所传递信息的响应,它可以被成员i理解。其中c代表距离成员i最近的个体,可以给i赋与更高的权重:

b)Vibbi是个体b(sb)所传递信息的响应,它可以被成员i理解。其中b代表最适合值,所以:

母蜘蛛的移动依赖于吸引和排斥,这些依赖于一个统一的随机数rm,其范围在[0,1]。如果rm比阈值PF小就会产生吸引,反之就产生排斥。

式中:α,β,δ和rand是取值在[0,1]之间的随机数;k代表循环迭代次数。
5)按照合作运营商方式移动公蜘蛛
此处再介绍第3种振动Vibfi(是个体f(sb)所传递信息的响应,它可以被成员i理解),其中f是距离个体i最近的母蜘蛛。权重:
公蜘蛛个体依据它们各自的权重按照降序排列,权重为wNf+m的个体位于序列中间,可以看作中值公蜘蛛个体。位置的改变如下式:
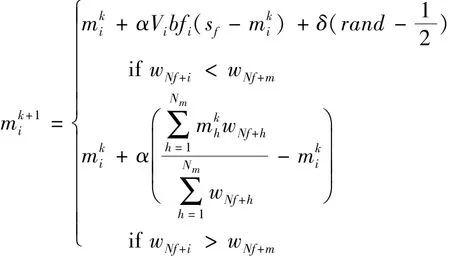
式中:sf代表距离公蜘蛛i最近的母蜘蛛。
6)交配发生在主要的公蜘蛛和母蜘蛛成员之间,当一只占优势地位的公蜘蛛m在一个特定范围r内定位到一些母蜘蛛的存在,就会发生交配而产生新的一窝蜘蛛。即:
7)停止条件到算法截止,否则跳转步骤3),群集蜘蛛算法的流程图如图6所示。
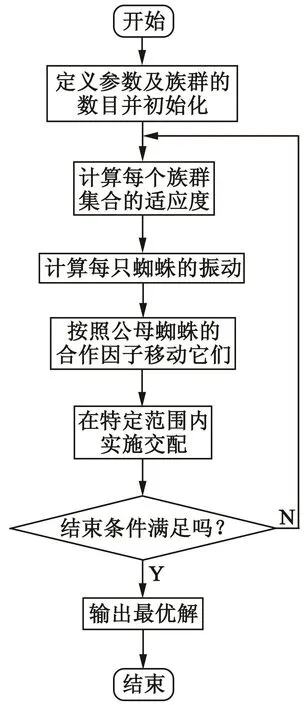
图6 群集蜘蛛算法流程图
4 仿真结果
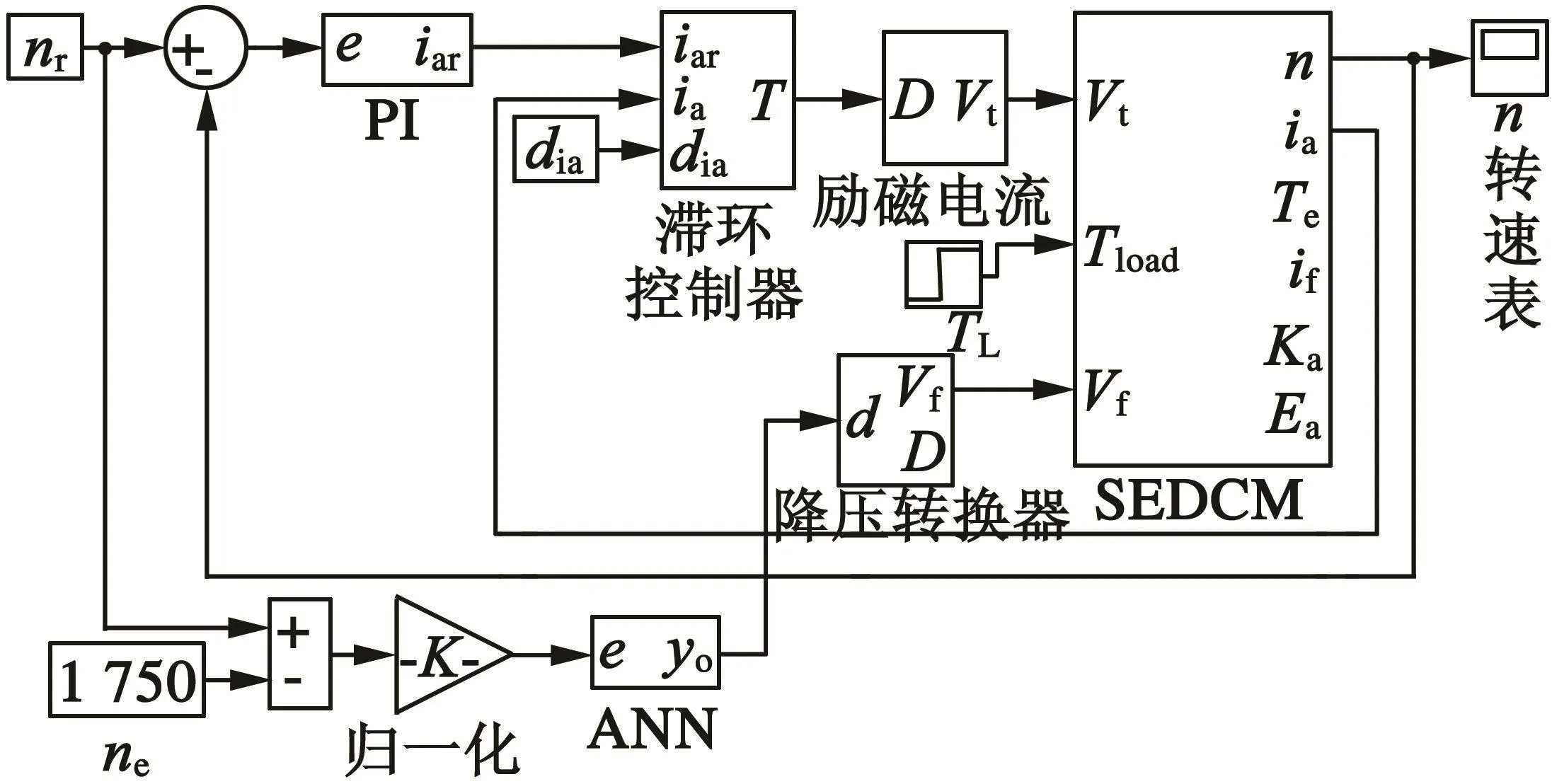
图7 他励直流电动机弱磁控制Simulink模型
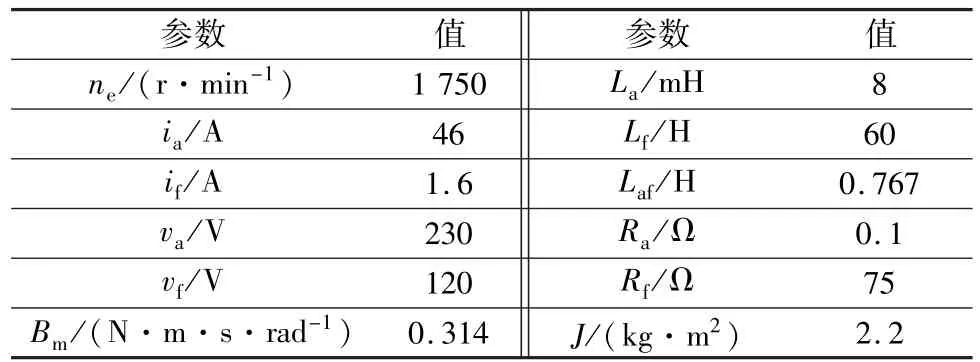
表1 直流电机额定值与参数表
他励直流电机弱磁控制的Simulink模型如图7所示。直流电机的额定值和参数如表1所示。外环使用PI控制器来控制电机转速,电机可以工作于电枢模式和磁场模式。为了控制电机电流,在内环使用了滞后电流模式,电机可以达到的最大电流是额定电流的2倍。励磁电压可以通过改变占空比的方式调节。当电机转速等于或小于额定转速时,励磁电流保持恒定。当电机转速大于额定转速时,励磁电流发生变化来控制转速。前期数据集作为输入输出,用于对神经网络进行训练,来获得相应的权重和偏置。训练数据如表2所示。神经网络的每个权重代表公母蜘蛛个体。假设个体数目为60,参数的取值范围假定在[0,1]之间。方差之和用作适应度函数。神经网络在隐含层有4个神经元,在输入层有3个神经元,在输出层有2个神经元。

表2 训练数据集
在额定转速上下的电机转速和励磁电流时间响应如图8所示。额定转速1 750 r/min以下,励磁电流始终保持在1.6 A。在t=12 s,20 s,28 s时,参考速度按照200 r/min步长改变。当电机转速超过额定转速后,励磁电流不断减小。通过弱磁方式驱动电机工作于额定转速之上,电枢电压应该在额定值之下保持恒定。这一点可以从图9中清晰地看到。通过转速的阶跃变化,电枢电压将基本保持恒定,并且其值保持在225 V额定值之下。

图8 电机转速与磁场电流的时间响应

图9 电机电枢电压
5 结 语
本文研究了他励直流电机弱磁调速的控制问题,基于群集蜘蛛算法对神经网络控制器的参数进行优化,在不同的转速设定值下仿真了系统的稳态性能和动态响应,结果表明该控制方式具有适应性强、动态过程过渡平稳快捷等优点。
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
火力与指挥控制(2022年5期)2022-07-25 03:50:10
疯狂英语·新读写(2021年2期)2021-02-25 08:58:46
弹箭与制导学报(2020年1期)2020-07-09 10:52:00
弹箭与制导学报(2019年6期)2019-06-24 08:40:20
电子制作(2017年1期)2017-05-17 03:54:12
西北工业大学学报(2015年1期)2016-01-19 03:30:28
网络安全和信息化(2015年4期)2015-11-30 08:27:32
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
电机与控制应用(2015年1期)2015-03-01 03:49:10
