
微型水力发电机组的T-S模糊神经网络控制器
2017-05-13 01:46张圣明
电气自动化 2017年1期
张圣明
(国网张家口供电公司,河北 张家口 075000)
微型水力发电机组的T-S模糊神经网络控制器
张圣明
(国网张家口供电公司,河北 张家口 075000)
随着能源短缺现象的加剧,全球能源互联网的提出,微型水力发电越来越被人们重视。详细分析了模糊控制、神经网络以及T-S模糊神经网络结构和算法,针对微型水力发电机系统的非线性和时变性的特点,构件了微型水力发电机组的T-S模糊神经网络控制器,采用MATLAB/Simulink仿真软件,在动态负载条件下对该微型水力发电机组进行仿真,分析了突甩负载和突加负载对机械功率、转子速度、频率和电压的影响,并与PID控制器进行比较。其仿真结果表明,所建立的T-S模糊神经网络控制器动态特性模型符合工程实际,满足系统的稳定性要求,具有良好的稳定性和鲁棒性。
模糊控制;神经网络;T-S模糊神经网络控制器;微型水力发电机组;MATLAB/Simulink仿真
0 引 言
目前,全球能源互联网的提出,清洁能源发电逐步替代煤炭资源,基于可再生能源的微电网已成为研究的热潮,微电网中的微电源地位日益提升[1,2]。而微型水力发电系统具有非线性、时变性和非最小相位等特性[3-5],其系统数学模型又难以确定,于是出现了基于模糊控制和神经网络控制的智能控制。
文献[6]设计了水轮机的模糊控制器,模拟仿真表明,该控制器能够对水力发电站的在非线性和不同水压下的涡轮进行有效的控制。包居敏和唐良宝将模糊神经网络与自适应控制结合起来,分析了含有模糊神经网络的自适应PID控制算法,建立水轮机调节系统的FNN控制系统总体结构,对其系统的线性模型进行验证,实现了水轮机调节系统的在线自适应控制[7]。文献[8]研究了水力发电站的零阶Takagi-Sugeno(T-S)模糊控制方法。
经典PID控制器在微型水力发电机组的应用,结构简单便于实现,具有一定的稳定性和控制精度[9,10],因此,PID控制器广泛应用于工业控制中。但是考虑到水轮机的非线性、时变性和非最小相位等特性,经典PID控制器难以胜任现在的控制目标,难以达到控制精度,因而结合模糊控制和神经网络控制的优点,本文研究了微型水力发电机组的T-S模糊神经网络,弥补了经典PID控制器响应速度和控制精度。
1 T-S模糊神经网络结构

图1 MISO的T-S模糊神经网络结构
T-S模糊神经网络结构,它主要由模糊神经网络的前件和后件两个部分组成,将模糊神经网络的解析结构有机地结合起来。多输入单输出MISO的T-S模糊神经网络结构图,如图1所示。
由图1可知,多输入单输出MISO的模糊神经网络结构总体分为两部分,即四层的前件网络和三层的后件网络。
1.1 前件网络
第一层是模糊神经网络的输入层,其输入值为X=[x1,x2,…xn]T,输入层的节点数为n。
第二层是将各个输入语言变量分别进行模糊化,采用高斯函数作为隶属函数的表达式为:
(1)
其中cihi表示隶属函数的中心;σihi表示隶属函数的宽度。
第三层是对模糊规则的前件进行匹配,若用乘积推理规则,则节点数可表示为:
(2)


第四层是解模糊层,对前一层的触发强度进行归一化计算,计算公式为:
(3)
其中m为解模糊层的节点总数。
1.2 后件网络
第一层是后件网络的输入层,其输入值为x0=1,是模糊规则中后件的常数层。
第二层中含有m个节点,用来计算进行每一条规则后的后件,其表达式为:
(4)

第三层用来针对前一层的输出数值求和,完成系统的输出计算,其表达式为:
(5)
2 T-S模糊神经网络算法

图2 T-S模糊神经网络结构简图
为了便于研究T-S模糊神经算法,针对上述MISO的T-S模糊神经网络结构,进行简化成典型含有五层的T-S模糊神经网络结构,其结构简图如图2所示。
结合前文所求得一阶梯度函数,可以推出参数调整的学习算法,则表示为:


(6)
其中i=1,2,…,n;hi=1,2,…,mi,β>0为学习率。
对于上面介绍的T-S模糊神经网络,当给定一个网络(或前件网络)的输入时,从X到α的映射与CMAC、B样条及RBF神经网络输入层的非线性映射基本相似。可以根据定性的知识或者系统的模糊性来确定这些参数的初值,接着按照上述的学习算法进行计算,能够很快的收敛到需求输入输出关系式子,这是模糊神经网络优于神经网络的关键;同时,由于含有神经网络的结构所在,因而参数能够比较容易的进行学习和调整,这是它优于模糊控制系统的关键。
3 微型水力发电机组的T-S模糊神经网络控制器研究
3.1 微型水力发电机组建模
通常情况下,用水轮机的力矩mt、流量q、水头h、机组转速n以及导叶开度a来表示水轮机调节系统的动态特性,自变量为水头h、机组转速n和导叶开度a,而水轮机力矩mt、流量q作为因变量,得到水轮机动态特性传递函数[11,12]。水轮机力矩mt和流量q可以表达式为:
(7)
在实际工程中,多数情况下水轮机受到大波动,其系统的参数变化剧烈,水轮机的机械特性为非线性,水轮机的非线性传递函数可表示为:
(8)

图3 水轮机调节系统MATLAB/Simulink仿真模型
结合水轮机流量和力矩的传递函数,把各个子系统连接起来,搭建整个水轮机调节系统的MATLAB/Simulink仿真模型,如图3所示。
3.2 微型水力发电机组的T-S模糊神经网络设计

图4 T-S模糊神经网络控制器结构图
首先根据前文对模糊控制与神经网络的研究和分析,构建微型水力发电机组的T-S模糊神经网络控制器总体结构图,如图4所示。

图5 基于T-S模糊神经网络控制器仿真图
按照文献[13-14]所设计的微型水力发电机组模型,用T-S模糊神经网络取代控制系统的PID调节器,搭建具体仿真模型,如图5所示,图中K1=0.014,K2=0.000 01。
根据水轮机调节系统的实际情况和专家经验知识,建立KP、KI和ec、Δec之间相对应的模糊控制规则表,分别如表1和表2所示。

表2 KI模糊控制规则表
3.3 突甩负载
微型水力发电机组工作在额定状况下,在t=4 s,5.5 s时,分别突减负载为:P=1.5 kW,Q=100 var;在t=7 s,8.5 s时,分别突加负载为:P=1.5 kW,Q=100 var。系统的发电机输出的有功功率P和无功功率Q的仿真波形,机械功率Pm、转子速度ωm、输出频率f和A相电压有效值,分别如图6和图7所示。
从图6和图7可以看出,线路L很短,吸收的无功很小,当突甩负载时水轮机的输出机械功率Pm每次减少0.03 pu,从而使输入发电机的机械功率Pm减少0.03 pu,转子速度ωm上升0.002 pu,而发电机的输出电压频率f会升高0.1 Hz,A相电压有效值在励磁控制系统的调节下有所波动,发电机的输出有功功率P和无功功率Q分别减少了1.5 kW,100 var,而后很快处于稳定状态。

图6 有功功率和无功功率
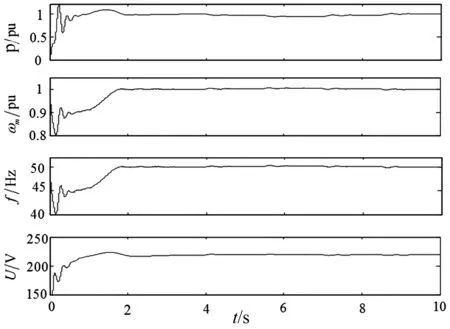
图7 机械功率、转子速度、电压频率和A相电压有效值
3.4 突加负载
微型水力发电机组工作在额定状况下,在t=4 s,5.5 s时,分别突加负载为:P=1.5 kW,Q=100 var;在t=7 s,8.5 s时,分别突减负载为:P=1.5 kW,Q=100 var。其仿真波形图分别如图8和图9所示。

图8 有功功率和无功功率
从图8和图9可以看出,当突加负载时水轮机的输出机械功率Pm每次增加0.03 pu,从而使输入发电机的机械功率Pm增加0.03 pu,转子速度ωm下降0.002 1 pu,而发电机的输出电压频率f会有所下降0.105 Hz,A相电压有效值在励磁控制系统的调节下有所波动,发电机的输出有功功率P和无功功率Q分别增加了1.5 kW,100.1 var,而后很快处于稳定状态。

图9 机械功率、转子速度、电压频率和A相电压有效值
3.5 仿真比较
根据前一节的研究分析,其系统仿真参数不变,在t=4 s时,增加负载:P=2 kW,Q=100 var;在t=6 s时,增减负载:P=2 kW,Q=100 var。系统的电压频率f、输入机械功率Pm、A相电压有效值和有功功率P的波形图,如图10所示。

图10 T-S模糊神经网络控制器与PID控制器仿真比较
由仿真图10可知,PID控制的同步微型水力发电机组在启动时,电压频率f、输入机械功率Pm、电压有效值和发电机输出的有功功率P会有较大的波动,在3 s后系统基本上处于稳定状态;而本文的控制器在启动时,只是稍微波动,逐步趋于稳定,在2 s后系统处于稳定状态,近似为理想数值。由图10第一个小图可知T-S模糊神经网络控制器,在增加负载时,电压频率f比PID控制器高0.04 Hz;在减少负载时,比PID控制器低0.04 Hz;由第二个小图可知T-S模糊神经网络控制器,在增加负载时,机械功率Pm比PID控制器的高0.003 5 pu;在减少负载时,比PID控制器低0.003 pu;由第三个小图可知T-S模糊神经网络控制器,无论在增加负载还是减少负载,A相电压有效值比PID控制器的高0.25 V;由第四个小图可知T-S模糊神经网络控制器,无论在增加负载还是减少负载,有功功率P比PID控制器的高75 W。
4 结束语
综上所述,本文从模糊神经网络出发,阐述了T-S模糊神经网络结构及其算法,构建了微型水力发电机组的T-S模糊神经网络控制器,分析了微型水力发电机组的T-S模糊神经网络控制器在启动时,波动较小,响应速度快;在突甩负载时,发电机的输入机械功率随着减少,转子速度、频率和电压有所上升;在负载增加时,发电机的输入机械功率随着增加,转子速度、频率和电压有所下降,但是在T-S模糊神经网络控制器的作用下,系统很快处于稳定状态,具有良好的稳定性和鲁棒性。
[1] 刘振亚.全球能源互联网中国电力出版社[M].北京:中国电力出版社,2015.
[2] 李德孚.中国户用微水电行业发展与建议[J].中国农村水电及电气化,2006,2(6):59-61.
[3] 唐良宝,包居敏.基于MATLAB的水轮机调节系统仿真分析[J].微计算机信息,2007,23(7) :254-255.
[4] 沈仲华.水轮机调节系统仿真研究及参数分析[J].装备制造技术,2009,37(2):47-48.
[5] 魏守平.水轮机调节系统的MATLAB仿真模型[J].水电自动化与大坝监测,2009,33(4):7-11.
[6] M MAHMOUD,K DUTTON,M DENMAN. Design and simulation of a nonlinear fuzzy controller for a hydropower plant[J]. Electric Power Systems Research. 2005,73(2): 87-99.
[7] 包居敏,唐良宝.水轮机调节系统的模糊神经网络控制[J].计算机应用研究,2007,24(11):167-168.
[8] NAND KISHOR.Zero-order T-S fuzzy model to predict hydro turbine speed in closed loop operation[J].Applied Soft Computing,2008,8(2):1074-1084.
[9] 高慧敏,刘宪林,徐政.水轮机详细模型对电力系统暂态稳定分析结果的影响[J].电网技术,2005,29(2):5-8.
[10] A KHODABAKHSHIAN,R HOOSHMAND.A new PID controller design for automatic generation control of hydro[J].Electrical Power and Energy Systems,2010,32(5) :375-382.
[11] 张侃君,尹项根,陈德树,等.大型多分支绕组水轮发电机动态模拟研究[J].电网技术,2009,33(6):96-101.
[12] 武诚,徐政,潘武略,等.原动机与调速器建模和参数辨识的新进展[J].电网技术,2007,31(1):179-182.
[13] 殷桂梁,张圣明.微型水力发电机组系统建模与仿真研究[J].电网技术,2012,36(2):147-152.
[14] 殷桂梁,张圣明.微型异步水力发电机组系统的建模和仿真[J].南方电网技术,2012,6(2):75-79.
A T-S Fuzzy Neural Network Controller for the Micro-hydroelectric Generating Set
Zhang Shengming
(State Grid Zhangjiakou Power Supply Co., Zhangjiakou Hebei 075000, China)
With aggravation of energy shortage and presentation of the global energy Internet, more and more attention is paid to micro-hydroelectric generation. This article analyses fuzzy control, neural network as well as the structure and algorithm of the T-S fuzzy neural network. With respect to the non-linear and time varied characteristics of the micro-hydroelectric generating system, we establish a T-S fussy neutral network controller for the micro-hydroelectric generation set. Matlab/Simulink simulation software is used to simulate the micro-hydroelectric generator set under dynamic load. The impact of sudden load and shock load upon mechanical power, rotor speed, frequency and voltage are analyzed, and comparison with PID controller is made. The simulation results show that the model of dynamic characteristics of the established T-S fuzzy neural network controller accords with actual engineering, meets the requirement on system stability and has good stability and robustness.
fuzzy control;neural network; T-S fuzzy neural network controller; micro-hydroelectric set; MATLAB/Simulink simulation
10.3969/j.issn.1000-3886.2017.01.022
TM612
A
1000-3886(2017)01-0074-04
张圣明(1985-),男,山东人,工程师,研究方向:微电网建模与控制策略,智能变电站运行分析等。
定稿日期: 2016-07-21
猜你喜欢
山东冶金(2022年4期)2022-09-14
大电机技术(2022年3期)2022-08-06
大电机技术(2022年2期)2022-06-05
建材发展导向(2021年13期)2021-07-28
装备制造技术(2020年4期)2020-12-25
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
