
大型绿色船舶光伏阵列结构与MPPT算法研究
2017-05-12 03:35唐若笠方彦军孔政敏
湖南大学学报(自然科学版) 2017年4期
唐若笠,方彦军,孔政敏
(1.武汉理工大学 能源与动力工程学院,湖北 武汉 430063;2. 武汉大学 自动化系,湖北 武汉 430072)
大型绿色船舶光伏阵列结构与MPPT算法研究
唐若笠1†,方彦军2,孔政敏2
(1.武汉理工大学 能源与动力工程学院,湖北 武汉 430063;2. 武汉大学 自动化系,湖北 武汉 430072)
围绕新能源发电在大型远洋船舶上的大规模接入问题,研究了基于太阳能发电的客货滚装船光伏阵列布局、拓扑结构及最大功率点跟踪(MPPT)模型与算法.结合船舶航行环境与船体结构特点,设计了大规模光伏阵列的船体布局及拓扑结构,建立了以大规模全局优化(LSGO)问题为描述形式的船体区域级MPPT数学模型.此外,提出一种基于环形拓扑的多参考向量协同进化粒子群算法(CCPSO-MR),并成功应用于船用大规模光伏阵列MPPT控制.仿真实验表明,针对LSGO问题的实时求解,CCPSO-MR算法在收敛速度、精度等方面显著优于各主流算法.基于所提阵列结构及MPPT算法,光伏系统能够在客货滚装船上实现大规模接入,并在各类复杂光照航行环境下具有良好的MPPT性能.
绿色船舶;光伏阵列;最大功率点跟踪;大规模优化
随着全球能源危机问题的日益突显,各类新能源电力越来越多地被应用于生产生活,并最大限度地取代化石燃料.太阳能作为取之不尽的清洁能源之一,其被人类利用的最主要形式是通过光伏发电技术转化为电能,进而广泛应用于航空航天[1],汽车[2],电力[3]以及船舶[4]等行业.对于装载船用光伏系统的绿色船舶,其燃油消耗能够得到不同程度的降低,甚至一些小型新能源船舶全船动力完全由光伏系统提供,实现零排放.相比于小型内河船舶,大型远洋客货滚装船作为荷载量大、航行时间长的高油耗船舶,光伏系统在其上实现大规模接入无疑对于节能减排工作具有更大的意义.
本文围绕光伏系统在大型远洋客货滚装船上大规模接入时的系统布局、阵列结构以及MPPT控制问题展开研究,旨在避免远洋船舶长时间航行过程中光照变化对系统造成的出力额外损失及局部热斑,实现船用大规模光伏系统实时、动态的MPPT控制.
1 船用光伏系统MPPT问题
大型客货滚装船具有较为开阔的甲板平面,具备光伏系统大规模接入的客观条件.为最大化空间利用率,船体上方分布于各处的向阳平面均能够被用于放置太阳能电池板.光伏系统在应用于建筑物等陆地环境时存在由不均匀光照而导致的“热斑效应”以及MPPT等问题,在应用于船舶环境时这类问题同样存在:一方面,船舶在航行过程中会受到云层及其他障碍物遮阴;另一方面,布置于低层甲板的电池板还可能受到高层甲板、桅杆等来自船舶自身的障碍物遮挡.此外,布置于船体两侧及两侧甲板的太阳能电池板,其光照情况还与航行方向、船舶姿态、光照角度等相关,故而彼此之间也互不相同.远洋船舶在航行过程中可能遇到的船体遮阴情况如图1所示.
光伏系统在小型船舶上接入时常忽略MPPT问题,即采用恒电压法对电池板工作点进行控制.对于大规模接入光伏系统的远洋客货滚装船,受制于系统规模及航行环境,这显然不是一种最优的方法.研究其光伏阵列拓扑结构及MPPT控制模型与算法对于克服“热斑效应”,提升系统输出功率具有重要意义.

图1 船舶航行过程中的船体遮阴
2 船体区域控制的光伏阵列拓扑结构
为最大化空间利用率,船体上方各闲置向阳平面及立面均可布置太阳能电池板.由于在不同环境条件下,各电池板所受到的光照情况可能互不相同,因而光伏阵列的拓扑结构需要根据船舶航行过程中的光照特点进行合理设计.
为避免“热斑效应”并最大化系统出力,理想的做法是对每一块电池板工作点进行独立控制,既实现电池板级MPPT[5].但这势必会大幅增加系统硬件成本及控制难度,对于大规模光伏系统并不适用.根据船体各部位光照特点并综合考虑系统成本,本文设计一种基于船体区域级(Hull Part level, HP-level)MPPT控制的大型远洋客货滚装船光伏阵列拓扑结构.具体地讲,将分布于船体不同位置的电池板按布局位置及光照特点分割为若干光照区域(Hull Illumination Part, HIP),每一区域包含数量不等的电池板并按一定结构相连接.每一区域被认为具有相似光照,进而作为一个最小单元进行独立MPPT控制.参与分区的光伏阵列包括以下4种类型:第Ⅰ类,单排布局的太阳能电池板,主要位于船体两侧部分狭窄位置.这些电池板进行串联连接,且每相邻n1块作为一个独立HIP;第Ⅱ类,对于双排或三排布局的电池板,将其每排两块或三块先并联,之后每相邻n2个并联结构再进行串联,构成2并(3并)n2串的混连结构;第Ⅲ类,以较大矩形片区布局的电池板阵列,如主甲板及船体两侧立面位置.这些电池板每相邻n3×n4块进行n3并n4串的混连连接;第Ⅳ类为布置于一些相对独立位置的阵列,将其独立混连作为HIP.以某大型远洋客货滚装船为例,其光伏阵列分区情况如图2所示.
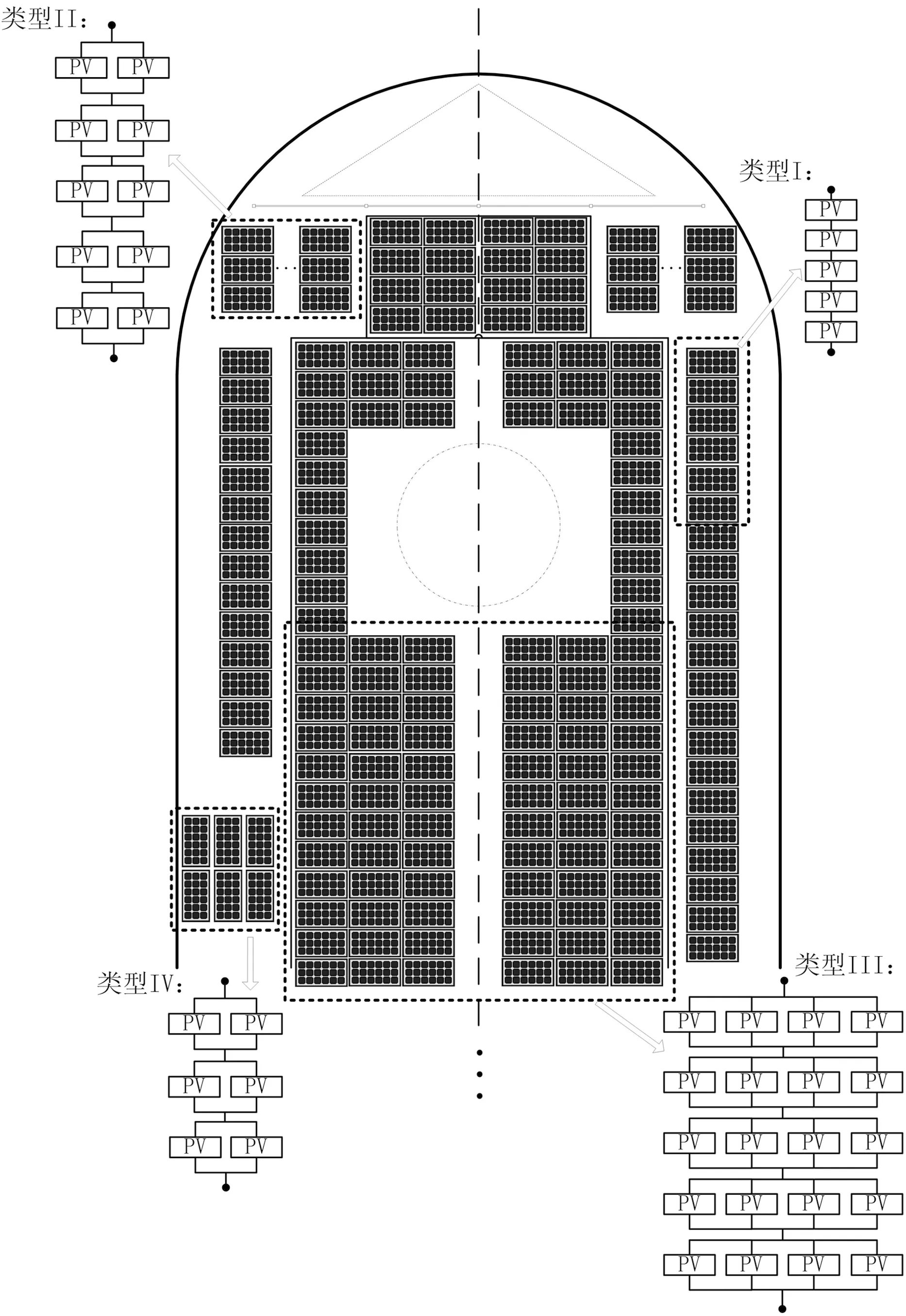
图2 船舶光伏阵列HIP分区
在此基础上,将全船所有HIP首先划分为若干组,每一组进行串并联连接.在串并联结构内部,为每一串联支路内每相邻两个HIP连接双向Cuk电路[5],独立控制各HIP的工作点.此外,为每条串联支路路端经Boost电路升压控制后并联至该组直流母线.最后,各组直流母线独立进行逆变后并入船舶电网.上述基于HIP的船舶光伏阵列拓扑结构如图3所示,这一结构的优势在于:一方面,能够根据不同对象船的结构特点灵活布置太阳能电池板;另一方面,可对处于不同遮阴水平下的船体各区域光伏阵列进行独立MPPT控制,以更好地利用海上丰富的太阳能资源.
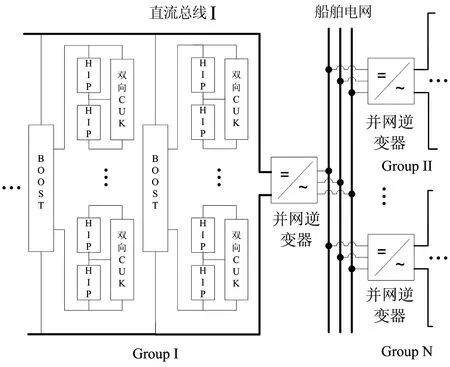
图3 基于HIP的船舶光伏阵列拓扑结构
3 船体区域级MPPT模型
关于光伏电池的工作特性,在国内外学者大量研究的基础上形成了诸多工程用数学模型[6-7],且大多数模型对光伏电池P-V特性拟合程度较好,能够满足工程应用需求.本文基于合肥工业大学能源研究所苏建徽教授等人提出的一种硅太阳电池工程模型[8],建立以LSGO (Large Scale Global Optimization)为描述形式的大型船舶船体区域级MPPT数学模型.单块太阳能电池数学模型如式(1)及式(2)所示:
(1)
(2)
其中,Sref=1 000 W/m2为参考光照强度,Tref=25 ℃为参考电池温度;ΔS=S-Sref,ΔT=T-Tref分别为当前光照与参考光照以及当前电池温度与参考温度间的差值;ISCref,VOCref,Imref与Vmref为光伏电池板的主要参数,可由具体电池板的生产厂商提供;a,b,c为模型补偿系数,取值分别为0.002 5 ℃,0.000 5(W/m2)以及0.002 88 ℃;e为自然对数的底数,其值约为2.718 28.
基于上述单块光伏电池模型,对于由p并s串构成的光照区域,其P-I特性可描述为:

s.t.I∈[IlIu]
(3)
其中,I与P分别表示该区域的电流及输出功率;Il与Iu分别为对电流I进行优化的下界和上界,考虑到极限条件下的短路电流并留出一定裕量,该优化范围通常可设定为[0, 15 A].C1,C2,VOC以及ISC分别为单块电池板的相应参数.
对于包含K个光照区域的全船光伏阵列,设第k个光照区域由pk×sk块太阳能电池板pk并sk串混连构成,则全船光伏系统以光照区域为最小控制单元的HP-level MPPT可被建模为式(4)所示的最小化问题:

s.t.Ik∈[IlIu]
(4)
此外,光照区域内部的不均匀光照会进一步导致其P-I呈多峰值特性.以2个光照区域为例,假设每个区域包含10块电池板并按照2并5串混连构成,各区域内部光照分布情况如表1所示.
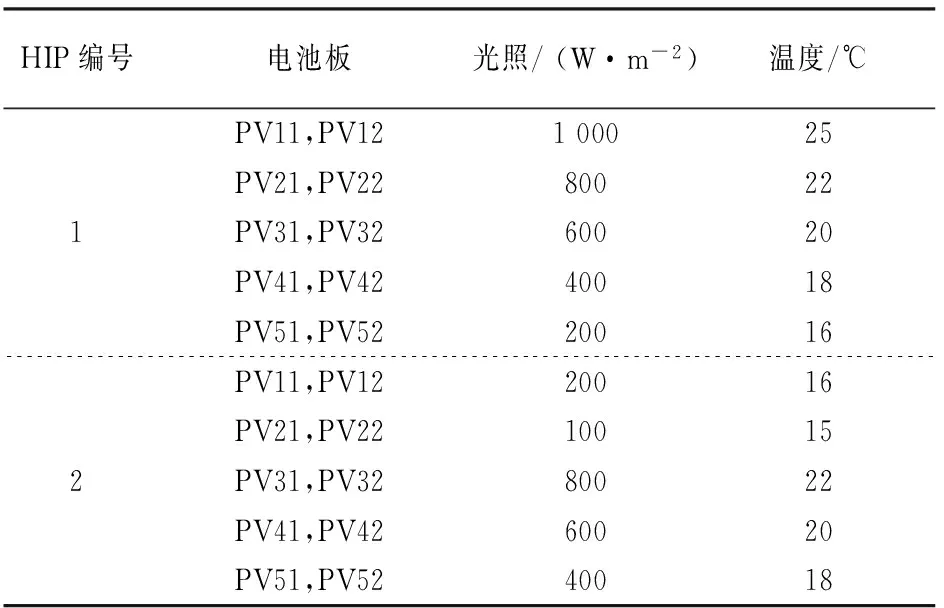
表1 光照区域内部光照分布情况
系统二维P-I特性如图4所示.可见,对于仅包含2个HIP的光伏系统,其P-I特性就已呈现出较多数目的局部极值点,这些极值点的存在容易导致MPPT算法求解性能出现退化.进一步地,当系统规模扩大至包含几百甚至上千HIP时,极值点数量及解空间范围均将呈指数上涨,此时式(4)所示的MPPT模型转化为具有多峰值及超高维特性的LSGO问题,要实现精确、实时的MPPT控制则势必对算法提出了更高要求.

图4 系统不均匀光照下的二维P-I特性
4 CCPSO-MR大规模优化算法
由上述HP-levelMPPT模型可见,船用大型光伏系统MPPT控制可被转化为LSGO问题进行求解.CC(Cooperatively Coevolving)框架被广泛应用于群集智能算法以求解LSGO问题[9],本文提出一种基于环形拓扑的多参考向量协同进化粒子群算法(Cooperatively Coevolving PSO based on Multi-context vectors and Ring topological structure, CCPSO-MR),完成最大功率点求解.CCPSO-MR算法思想主要包括以下几个方面:第一,解空间分割,即将高维问题转换为多个低维子问题以实现降维求解;第二,定义多个参考向量并按照环形拓扑进行连接与备选,实现子问题间的信息传递与解空间重构;第三,采用高斯分布进行粒子位置更新.
4.1 解空间分割
CCPSO-MR算法首先进行解空间分割,将高维问题转化为多个低维子问题进而实现降维求解.以D维问题为例,初始化规模为NP的种群P,则P为NP×D的矩阵.将矩阵P按列随机分为K组,即P= [PS1,PS2, … ,PSK],且K=D/s,s为每一组包含的变量数目,即每一子问题的规模.CCPSO-MR采用动态组规模机制,即s从预先设定好的组规模序列S中随机初始化,如S={1, 2, 5, 10, 20, 50},且算法每一代判定当前最优解是否有进化,若有则保持s不变,若无则s从序列S中重新选取.
按上述方式进行分割后,D维解空间被拆分为K个s维子空间,进而D维种群P的进化过程被转化为K个s维子种群PSi(i= 1, 2, …,K)的协同进化过程.算法的每一代依次遍历各子种群,且每一子种群内部按照具体的算法规则进化每一粒子个体.
4.2 基于环形拓扑的多参考向量协同机制
由4.1节所述规则不难发现,算法在对每一子问题进行求解时存在问题:各子问题仅对应原始D维问题的部分变量,无法直接计算子种群个体的目标函数值.已有的CC(Cooperatively Coevolving)框架通过定义参考向量解决这一问题:D维参考向量(Context Vector, CV)由其各维度对应的子种群最优个体构成,每一子种群在计算其个体的目标函数值时,所缺维度全部由CV对应维度变量值进行填补.可见,CC框架在求解每一子问题时,都是基于其余子问题对应变量取值为当前最优解的假设,当不同子问题之间存在耦合关系时,这一方式并不可行.
针对上述问题,本文提出一种基于环形拓扑的多参考向量协同机制,在概率意义下修复因解空间分割对变量耦合关系造成的破坏.具体地讲,首先从原始D维种群P中选取p个较优个体初始化p(p>1)个参考向量;将p个参考向量按照环形拓扑进行连接,如图5所示;在遍历每一子问题个体时,参考向量按如下方式选取:从p个CV中随机指定其一(如CVm),参照图5所示的拓扑结构,从CVm以及与之相邻的CVm-1与CVm+1中随机选取一个作为参考向量.
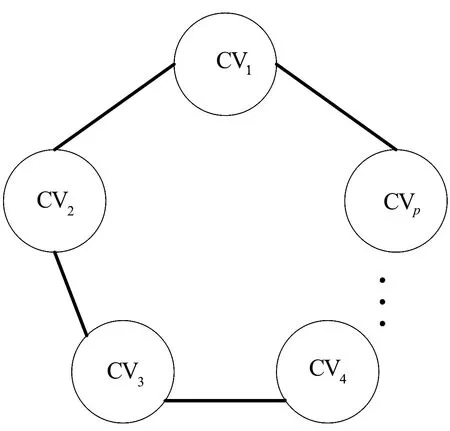
图5 基于环形拓扑的多参考向量连接方式
此外,为防止冗余参考向量的产生,每隔C代对全部参考向量进行交叉更新操作:随机交换最优参考向量CVbest与最差参考向量CVworst的部分变量,所得新的向量CVnew用于与CVworst进行比较,若较优,则用CVnew更新CVworst.重复上述操作Ctime次.
4.3 基于高斯分布的粒子位置更新公式
CCPSO-MR算法采用高斯分布生成每一粒子个体的新位置,如式(5)所示:
(5)
4.4 CCPSO-MR算法流程
综上所述,CCPSO-MR算法的核心思想在于解空间分割,变量分组以及多参考向量的定义、选取与更新.CCPSO-MR算法流程如表2所示.
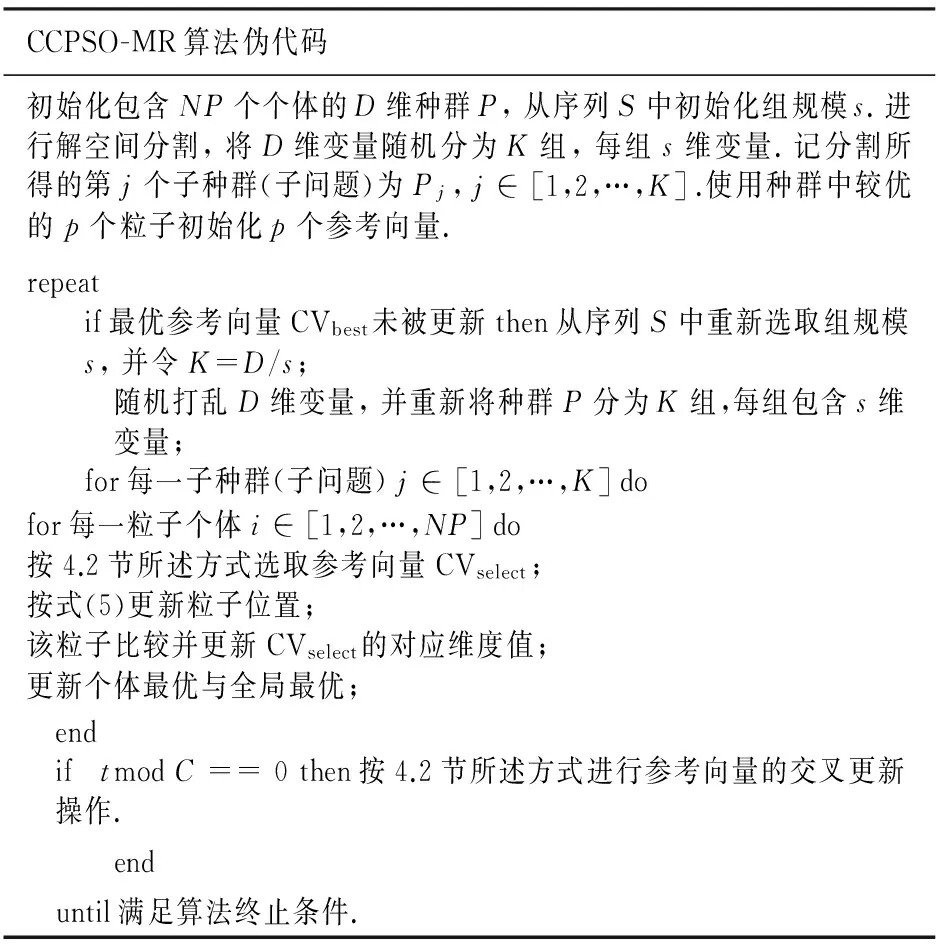
表2 CCPSO-MR算法流程
5 数值仿真实验
5.1 CCPSO-MR优化性能测试
首先以1 000维CEC 08 Benchmarks[10]F1-F6为例对CCPSO-MR算法性能进行验证.为便于结果对比,本文在结果分析时去掉该偏转值,即理论最优解均转化为0.此外,选用经典PSO及若干主流且性能优良的大规模优化算法进行对比实验,各算法参数设置如下.
1) 经典PSO:c1=c2=2.05,ω从0.9至0.4线性递减;
2) 性能优良的PSO改进算法PSOEM[11]:ξt=ξt-1=0.5, 其余参数取值同经典PSO;
3) 针对LSGO问题设计的较新且性能优良的算法CCPSO-SK-rg-aw[12]与CCPSO2[13]. 对于CCPSO-SK-rg-aw:K=10,c1=c2=2.05,χ=0.729. 对于CCPSO2:S={1,2,5,10,20,50};
4) 其他性能优良的智能优化算法JADE[14]与SaDE[15]:CRm=Fm=0.5,σCR=0.1,σF=0.3;
5) 本文所提CCPSO-MR算法:p=5,C=10,Ctime=50,S={1,2,5,10,20,50}.
所有算法种群规模均设置为50,目标函数维数1 000,算法终止条件为目标函数达到最大调用次数Max_ges=5E6.各算法独立运行25次,优化结果如表3所示.由数值结果可以看出,对于1 000维的CEC 08Benchmarks,PSO,PSOEM以及JADE,SaDE算法受“维数灾难”影响较大,优化误差显著高于其他CC框架下的大规模优化算法.本文所提出的CCPSO-MR算法对于这类LSGO问题优化性能良好:对于可分割问题F1与F4,能够在仿真平台有限的计算精度下准确给出理论最优解0,显著优于其余对比算法;对于不可分割问题F3与F5,CCPSO-MR算法的平均优化结果分别为3.22E+00与3.52E-15,较其余对比算法优势显著.此外,仅对于函数F2,CCPSO-MR算法略差于CCPSO2,但仍显著优于其他算法.各算法进化曲线如图6所示,由于PSO及PSOEM算法性能已不具有可比性,绘制进化曲线时不将其绘入.由图6可见,对于CEC08的绝大多数测试函数,CCPSO-MR算法具有更高的优化精度与更快的收敛速度,显著优于包括CCPSO2,CCPSO-SK-rg-aw等大规模优化算法在内的对比算法.
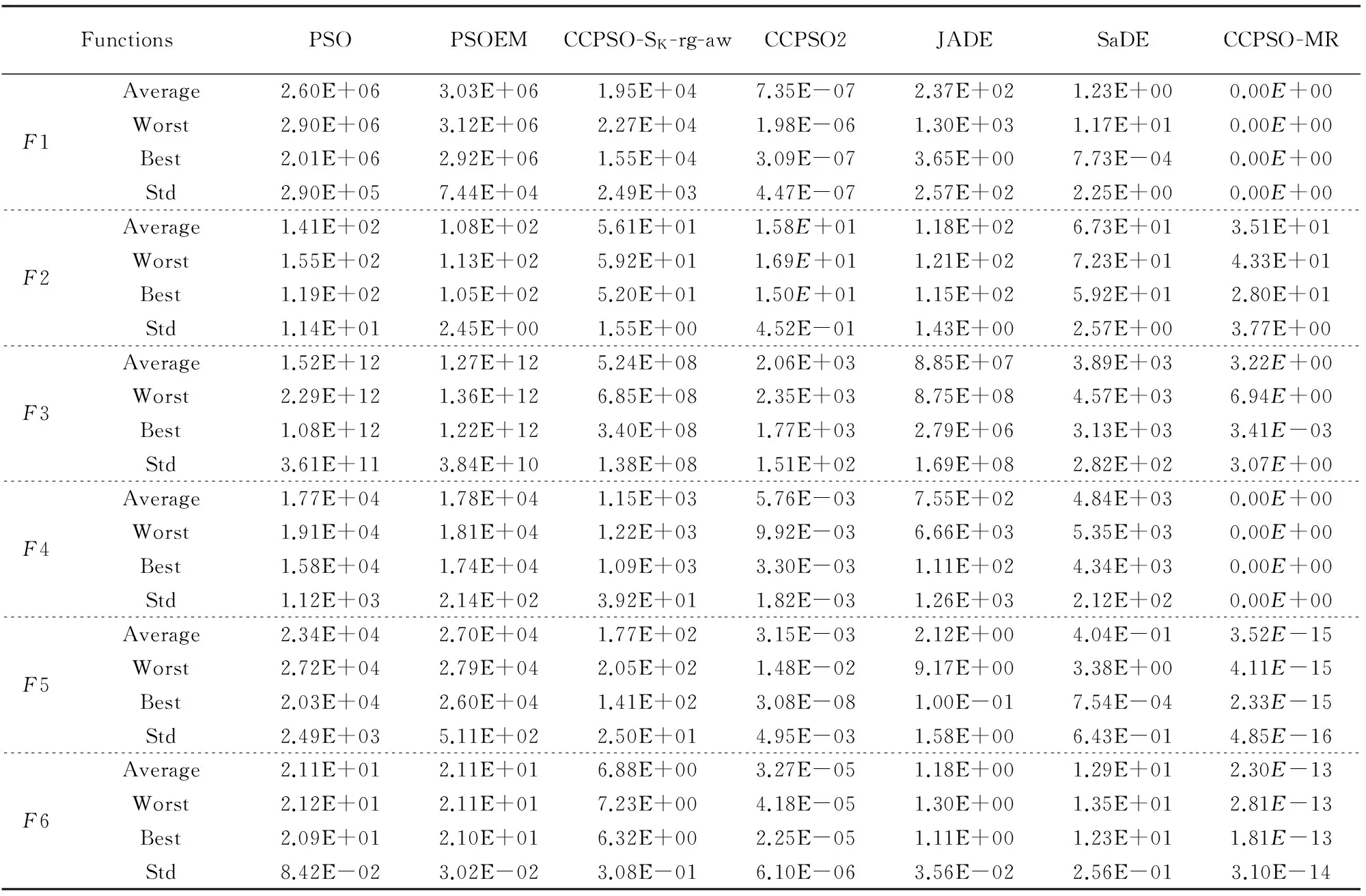
表3 1 000维CEC 08 Benchmarks优化结果对比
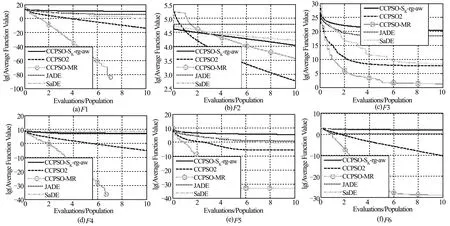
图6 1 000维F1至F6各算法平均进化曲线
5.2 船舶局部遮阴下的MPPT仿真实验
基于所建立的远洋客货滚装船HP-level MPPT数学模型及针对LSGO问题提出的CCPSO-MR算法,进行船舶航行过程中局部遮阴环境下的MPPT仿真实验.滚装船光伏阵列按图2布局,具体地,设系统包含Ⅰ类HIP 50个,各自为3块电池板串联结构;Ⅱ类HIP 100个,各自为6块电池板2并3串混连构成;Ⅲ类HIP 300个,各自为10块电池板2并5串混连构成;Ⅳ类HIP 50个,各自为4块电池板2并2串混连构成.上述系统共包含3 950块太阳能电池板,各电池板采用式(1)及式(2)所示模型,具体参数设置如下:ISCref=4.515 A,VOCref=44.852 V,Imref=3.989 A,Vmref=36.895 V.则式(4)所示HP-level MPPT模型可描述为式(6)所示的具体形式.可见,该系统MPPT被转化为500维LSGO问题.
s.t.Ik∈[IlIu]
(6)
5.2.1 船舶局部遮阴航行条件下MPPT仿真
船舶在航行过程中由于光照方向变化可能导致背光侧及底层甲板部分位置出现大面积遮阴.以上述船用光伏系统为例,在表4所示遮阴环境下进行MPPT仿真实验.以CCPSO-MR作为MPPT算法,并采用CCPSO2,CCPSO-Sk-rg-aw以及JADE算法进行对比实验.各算法种群规模设置为15,终止条件为Max_ges=1E5,CCPSO-MR与CCPSO2的动态组规模S={10, 20, 50},其余参数设置同5.1节.

表4 船舶局部遮阴航行条件
各算法20次独立运行的平均结果如表5所示.可见,CCPSO-MR算法能够以充分满足工程应用的精度给出系统最大输出功率对应的各HIP工作点,进而传递给相应DC/DC电路控制器完成MPPT控制.此外,CCPSO2算法误差为1.74%,略差于CCPSO-MR.CCPSO-Sk-rg-aw及JADE算法对于该500维MPPT模型求解误差较大,难以满足工程应用的需求.

表5 局部遮阴航行条件下各算法MPPT结果
5.2.2 船舶复杂光照航行条件下MPPT仿真
进一步地,当船舶在航行过程中遇到云层或来自外界及船舶自身的其他障碍物遮挡,船舶光伏阵列所受到的光照情况将变得更为复杂.此时,不仅不同HIP相互之间的光照不同,同一HIP内各电池板的光照情况也可能互不相同.设船舶复杂光照航行条件如表6所示,各算法MPPT结果如表7所示.

表6 船舶复杂光照航行条件
由表7所示数值结果可以看出,在船舶复杂光照航行条件下,各HIP内部出现不均匀光照,使得MPPT模型在高维度特性的同时还呈现出多极值特性,进而导致最大功率点求解问题的进一步复杂化.此时,CCPSO2算法性能出现显著退化,误差达到5.45%.而CCPSO-MR算法误差仅为0.63%,可见,在船舶处于复杂光照的航行条件下,CCPSO-MR算法依然能够保证足够高的HP-level MPPT精度.
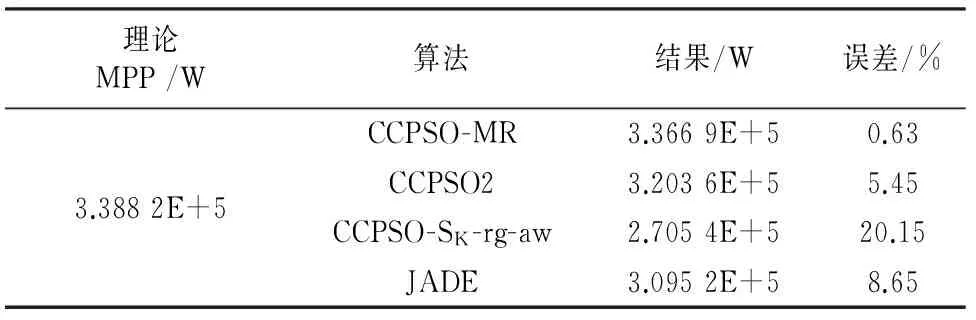
表7 复杂光照航行条件下各算法MPPT结果
6 结 论
针对光伏系统在大型远洋客货滚装船上大规模接入时的阵列布局、拓扑结构以及MPPT等问题,结合船舶结构及航行环境特点,提出一种基于船体光照区域控制的阵列布局方法及拓扑结构.在此基础上,将上述HP-level MPPT建模为LSGO问题,并针对问题特点设计CCPSO-MR算法进行最大功率点的实时求解.
数值实验结果表明:1) 对于1 000维的CEC 08 Benchmarks的求解,CCPSO-MR算法在收敛速度、优化精度等方面具有一定优势;2) 基于所建立的HP-level MPPT数学模型,CCPSO-MR算法能够实时、高效地进行船舶局部遮阴及复杂光照航行条件下的MPPT求解.基于上述阵列布局与拓扑结构、HP-level MPPT模型以及CCPSO-MR算法,光伏系统能够实现在大型远洋客货滚装船上的大规模接入,并能够完成各种航行环境条件下的MPPT高效求解,为实现船舶动态MPPT控制提供重要技术支撑.
[1] 张衍垒,李兆杰, 张向强. 平流层飞艇光伏能源系统总体参数设计与计算[J]. 太阳能学报, 2013, 34(2): 283-288.
ZHANG Yanlei, LI Zhaojie, ZHANG Xiangqiang. General parameter design of PV power energy system of stratospheric airship[J]. Acta Energiae Solaris Sinica, 2013, 34(2): 283-288.(In Chinese)
[2] 谢维, 段建民. 含最大功率点跟踪的电动汽车太阳能充电系统[J]. 太阳能学报, 2016, 37(1): 84-91.
XIE Wei, DUAN Jianmin. The solar energy charging system with MPPT for electric vehicle[J]. Acta Energiae Solaris Sinica, 2016, 37(1): 84-91. (In Chinese)
[3] 舒大松, 黄挚雄, 康伦, 等. 基于超级电容储能的光伏并网低电压穿越研究[J]. 湖南大学学报:自然科学版, 2014, 41(8):60-64.
SHU Dasong, HUANG Zhixiong, KANG Lun,etal. Research on the low voltage ride-through of grid-connected photovoltaic system based on supercapacitor energy storage[J]. Journal of Hunan University :Natural Sciences, 2014, 41(8): 60-64. (In Chinese)
[4] 李清, 李坤, 王利朋, 等. 严格排放法规背景下太阳能在船舶上的应用研究[J]. 船舶工程, 2016, 38(1): 67-72.
LI Qing, LI Kun, WANG Lipeng,etal. Research on solar energy applications on ship under background of strict emission regulations[J]. Ship Engineering, 2016, 38(1): 67-72. (In Chinese)
[5] TANG Ruoli, WU Zhou, FANG Yanjun. Maximum power point tracking of large-scale photovoltaic array[J]. Solar Energy, 2016, 134: 503-514.
[6] 傅望, 周林, 郭珂, 等. 光伏电池工程用数学模型研究[J]. 电工技术学报, 2011, 26(10): 211-216.
FU Wang, ZHOU Lin, GUO Ke,etal. Research on engineering analytical model of solar cells[J]. Transactions of China Electrotechnical Society, 2011, 26(10): 211-216. (In Chinese)
[7] 邱纯, 蔡涛, 段善旭, 等. 任意辐射强度与温度下硅光伏电池模型参数的计算方法[J]. 太阳能学报, 2013, 34(9): 1626-1632.
QIU Chun, CAI Tao, DUAN Shanxu,etal. Extraction of solar cell model parameters under arbitaryirradiance and cell temperature[J]. Acta Energiae Solaris Sinica,2013, 34(9): 1626-1632. (In Chinese)
[8] 苏建徽, 余世杰, 赵为, 等. 硅太阳电池工程用数学模型[J]. 太阳能学报, 2001, 22(4): 409-412.
SU Jianhui, YU Shijie, ZHAO Wei,etal. Investigation on engineering analytical model of silicon solar cells[J]. Acta Energiae Solaris Sinica, 2001,22(4):409-412. (In Chinese)
[9] OMIDVAR M N, LI X D, MEI Y,etal. Cooperative co-evolution with differential grouping for large scale optimization[J]. IEEE Transactions on Evolutionary Computation, 2014, 18(3): 378-393.
[10]TANG Ruoli, WU Zhou,FANG Yanjun. Adaptive multi-context cooperatively coevolving particle swarm optimization for large-scale problems[J]. Soft Computing. (DOI: 10.1007/s00500-016-2081-6)
[11]段其昌, 黄大伟, 雷蕾, 等. 带扩展记忆的粒子群优化算法仿真分析[J]. 控制与决策, 2011, 26(7): 1087-1090, 1100.
DUAN Qichang,HUANG Dawei,LEI Lei,etal. Simulation analysis of particle swarm optimization algorithm with extended memory[J]. Control and Decision, 2011, 26(7): 1087-1090, 1100. (In Chinese)
[12]LI X D, YAO X. Tackling high dimensional nonseparable optimization problems by cooperatively coevolving particle swarms[C]∥Proc IEEE Congr Evol Comput.2009:1546-1553.
[13]LI X D, YAO X. Cooperatively coevolving particle swarms for large-scale optimization[J]. IEEE Trans Evol Comput, 2012, 16(2):210-224.
[14]ZHANG J Q, SANDERSON A C. JADE: Adaptive differential evolution with optional external archive[J]. IEEE Trans Evol Comput, 2009, 13(5): 945-958.
[15]QIN A K, SUGANTHAN P N. Self-adaptive differential evolution algorithm for numerical optimization[C]∥Proceedings of 2005 IEEE Congress on Evolutionary Computation.Edinburgh: IEEE, 2005:1785-1791.
Research on Topological Structure and MPPT Algorithm of Photovoltaic Array in Large Green Ship
TANG Ruoli1†, FANG Yanjun2, KONG Zhengmin2
(1. School of Energy and Power Engineering, Wuhan University of Technology, Wuhan 430063, China; 2. Department of Automation, Wuhan University, Wuhan 430072, China)
To introduce the new energy power generation into large ocean-going ship, the topological structure as well as the MPPT model and control algorithm of large-scale photovoltaic array in ro-ro ship was studied. By considering the navigation environment and structural features of large ro-ro ship, the topological structure of large-scale photovoltaic array was designed, and its hull-part-level MPPT model described as the LSGO was also built. Additionally, a cooperatively coevolving particle swarm optimization based on multi-context vectors and ring topological structure (CCPSO-MR) was proposed and applied to the MPPT control of the ship's large-scale photovoltaic array. Simulation results show that the CCPSO-MR performs better than some famous algorithms in convergence speed and accuracy on solving the LSGO problems. With the utilization of the proposed structure and MPPT algorithm, the large-scale photovoltaic system can be introduced into the ocean-going ro-ro ship successfully and works well under complex environmental conditions.
green ship; photovoltaic array; maximum power point tracking; large-scale global optimization
1674-2974(2017)04-0109-09
10.16339/j.cnki.hdxbzkb.2017.04.015
2016-06-17
国家自然科学基金资助项目(61201168), National Natural Science Foundation of China (61201168);中央高校基金科研业务费专项资金资助项目(2017IVA024),The Fundamental Research Funds for the Central Universities(2017IVA024)
唐若笠(1987-),男,陕西汉中人,武汉理工大学讲师,博士†通讯联系人,E-mail:trlwsm@126.com
U662
A
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
铝加工(2021年5期)2021-12-02
军事文摘(2021年18期)2021-12-02
疯狂英语·新读写(2021年6期)2021-08-05
船舶标准化工程师(2019年4期)2019-07-24
电子制作(2018年12期)2018-08-01
知识就是力量(2017年12期)2018-01-15
中学生英语(2017年6期)2017-07-31
青年歌声(2017年6期)2017-03-13
船舶标准化工程师(2015年5期)2015-12-03
