
Delta机器人运动优化的研究
2017-05-12 07:56熊倍华周磊梁佳楠
自动化与信息工程 2017年1期
熊倍华 周磊 梁佳楠
(1.广东省智能制造研究所 2.华南智能机器人创新研究院)
Delta机器人运动优化的研究
熊倍华1周磊2梁佳楠1
(1.广东省智能制造研究所 2.华南智能机器人创新研究院)
轨迹规划是设计Delta机器人末端执行器的运动轨迹,可保证Delta机器人高速、流畅和精准运动。以自主研发的Delta机器人样机测试分析为基础,研究末端执行器的运动轨迹。采用参数修正模式优化轨迹,获得均匀平滑、周期短、冲击弱的轨迹,提高了Delta机器人运行速度。
Delta机器人;轨迹规划;参数修正模式
0 引言
Delta机器人已从最初的一种简单机械装置发展为自动化生产及智能制造的核心工业装备,广泛应用于食品、药品和电子等行业。近年来,针对Delta机器人的研究倍受青睐,其中,运动空间的轨迹规划是热点之一。轨迹规划是保证Delta机器人运动高速、精准和平稳的前提。
为获得Delta机器人良好的动态性能,在运动轨迹控制层面,可将高副机构高速运行时的规律运用于Delta机器人的轨迹规划,以提高机器人操作空间轨迹的连续性[1]。从数值分析的角度而言,在设计Delta机器人末端执行器运动形式时引入样条曲线,操作空间的轨迹能保持连续[2]。此外,还可利用序列二次规划方法将Delta机器人操作空间按三次样条处理,同时对各矢量的变化进行一定的处理,也能使末端执行器获得连续的运动轨迹[3]。
在运行速度较高的情况下,上述轨迹规划方式均会引起较大的冲击,使机构产生明显振动,从而降低Delta机器人的定位精度。针对这个普遍存在的问题,本文以自主研发样机的相关测试为基础,构建运动修正曲线,规划Delta机器人末端执行器运动轨迹,并通过实际作业测试,比较分析数据,实时修正,力求达到最佳连续且平滑的效果。
1 Delta机器人
Delta机器人属高速、轻载的并联机器人,其空间3自由度并联机构精密、紧凑,驱动单元均布于静平台,具有刚度大、承载能力强、动态性能好且重复定位精度高等特性。Delta机器人样机如图1所示。
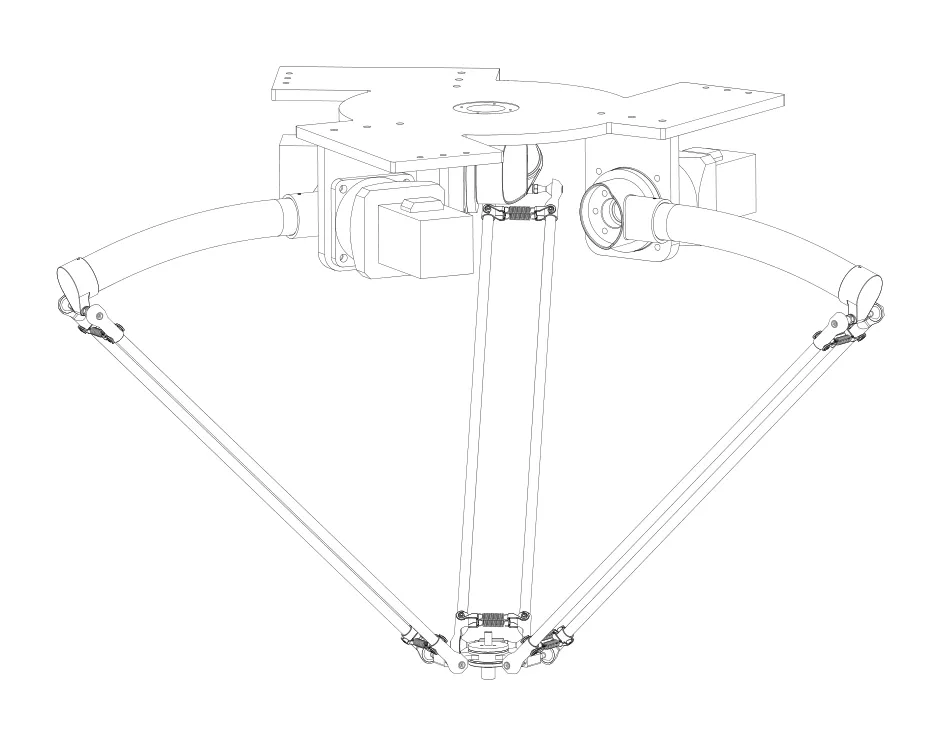
图1 Delta机器人样机
2 轨迹生成方式
在实际生产应用中,Delta机器人可对一定质量的物体实现快速抓取和放置。因此,末端执行器的轨迹只需完成点到点的运动。为满足该要求,并保证中间过渡点的精度,本文Delta机器人样机末端执行器的轨迹先依据作业空间建立运动轨迹的初始形态,再通过插值,建立轨迹函数,实时修正。轨迹范围内若存在奇点,则需要考虑进去,包括其差异性和变化性,并且有必要根据其特征生成相关数据。
3 轨迹规划
本文Delta机器人样机末端执行器的加速度可达100 m/s2,速度可达10 m/s,驱动单元负载中的惯性项负载、速度项负载所占的比重大。因此,在Delta机器人运动控制中,为减小运动冲击,末端执行器完成运动应至少具备以下2个条件:
1) 运动起始点和终止点的速度、加速度均为0;
2) 运动轨迹中间点的速度、加速度曲线均连续可导,跃度有界。
设机器人完成一段轨迹所需总时间为T,将加速度曲线用时刻Ti(i = 1, 2, 3, 4)分为5段:0~T1为修正加速过渡;T1~T2为匀加速阶段;T2~T3为匀加速到匀减速的修正过渡;T3~T4为匀减速阶段;T4~T为修正减速过渡至0。各时刻之间的关系满足式(1)。

修正加速度曲线
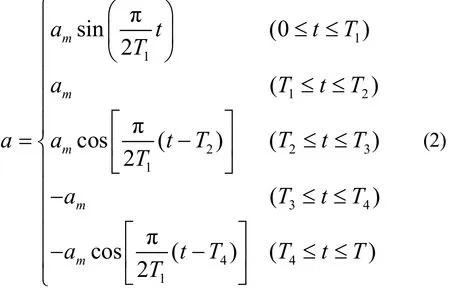
其中,am为最大加速度。
对式(2)两边2次积分,由始末两点的加速度为0且光滑连续可得轨迹的位移曲线,如式(3)所示。
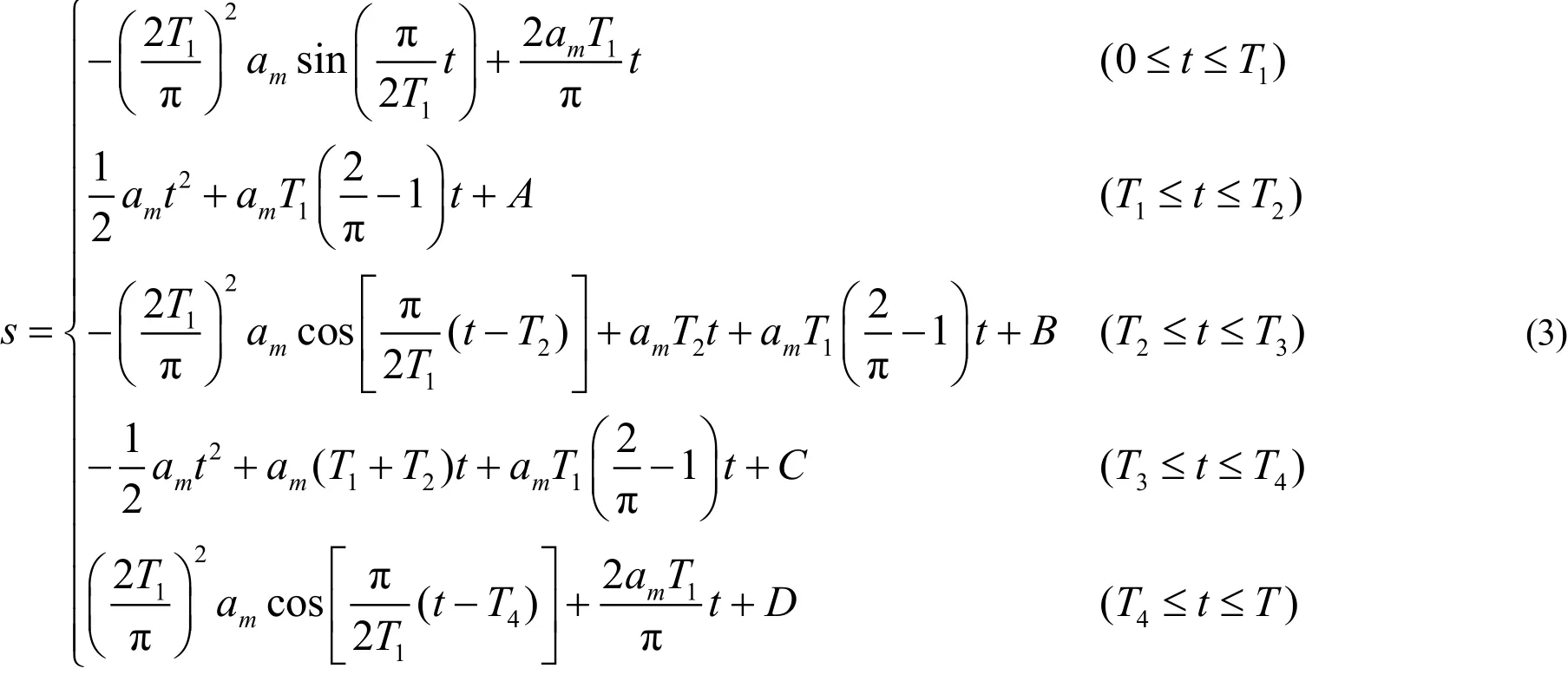
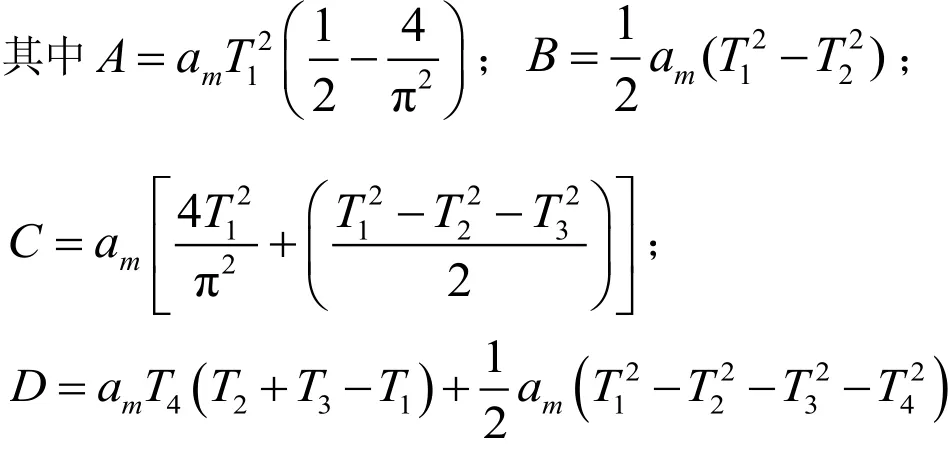
当t = T时,即可获得在该时间段内的总行程,如式(4)所示。
为简化处理,一般将行程均分为2段,前一段为加速阶段,后一段为减速阶段。
在T = 0.2 s,加速度曲线均分,且am= 100 m/s2时,通过参数修正模式进行轨迹规划,得到对应的位移、速度、加速度和跃度轨迹如图2所示。从加速度曲线可以看出,此规划所引起的冲击趋近于极小值,将其运用于Delta机器人末端执行器的轨迹规划中,能改善运动轨迹,提升动态性能。
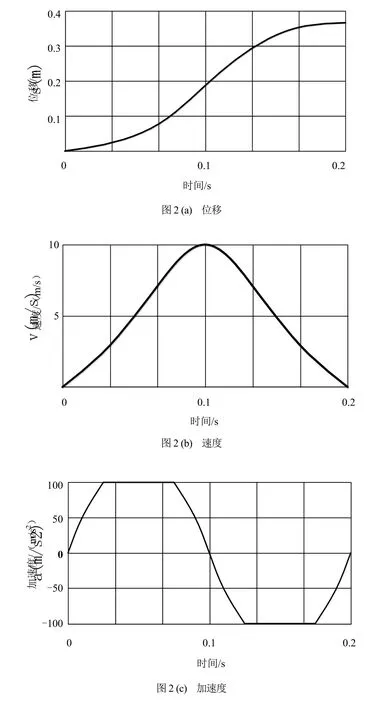
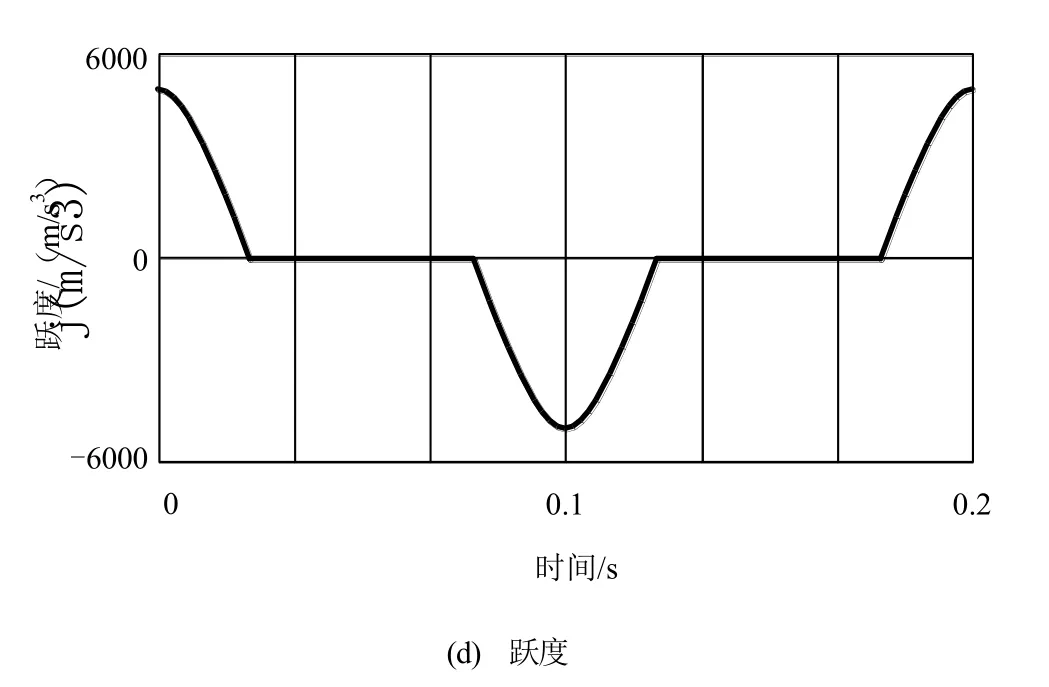
图2 轨迹规划
4 门型轨迹
Delta机器人一般用于抓放场合,其运动路径与门的型式相仿,故称之为“门型轨迹”或“门型路径”,如图3所示。对于该类型机器人,以特定的门型轨迹,完成一个来回所用的时间是衡量机器人工作性能的最重要指标之一。测试时通常取:P1P2= P3P4= 25 mm,P2P3= 305 mm。在完成一个门型轨迹之前,操作者只需给定P1、P4两点,可采用示教方式,也可采用视觉方式给定[4]。Delta机器人控制系统据这2个点的坐标规划出该门型轨迹,完成路径的给定,其中高度P1P2、P3P4可根据实际情形自行设置或调整。
对于图3所示的门型轨迹,在拐点P2、P3处,末端执行器的运动存在突变,使机构受到阵性冲击,引起较大振动。因此,在该门型轨迹的拐点处,采用插值法,进行衔接处理,并通过最佳逼近,达到平滑过渡。经优化的门型轨迹如图4所示,该轨迹一方面使运动的变化柔缓而避免突变,另一方面减少了末端执行器往返的行程,缩短了运动周期。门型轨迹的3段路径,其距离可以相同,也可以不同,习惯标记为P1P2、P2P3和P3P4,可分别进行规划。
图4的说明如下:
1) 将水平运动轨迹的加速度ah、速度vh及位移sh和垂直运动轨迹的加速度av、速度vv及位移sv部分叠加,且两者均须进行修正处理;
2) 设定P1P2运动时间为T1,P2P3运动时间为T2,P3P4运动时间为T3;
3) 记t = 0时为垂直上升运动P1P2的初始时刻,t = T1/2时为水平运动P2P3的初始时刻,t =T2+T1/2-T3/2时为垂直下降运动P3P4的初始时刻,P5为P1P2的中点,P8为P3P4的中点。P5P6、P7P8曲线段为垂直运动和水平运动的合成运动。

图3 门型轨迹

图4 经优化的门型轨迹
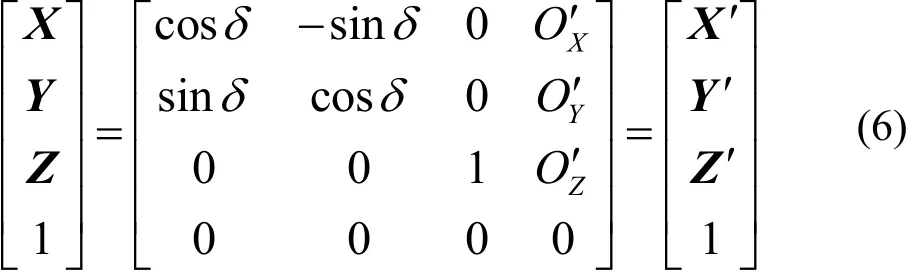
作业时,Delta机器人控制系统获得目标点的位置后,处理器便根据当前位置与目标点位置建立一个竖直的虚拟平面X'O'Y',如图5所示,通过式(3)生成目标点在X'O'Y'平面内的轨迹数据。此外,在需要的时候,还可以将不在X'O'Y'平面内的点,通过矩阵变换生成该平面内的坐标,如式(6)所示。
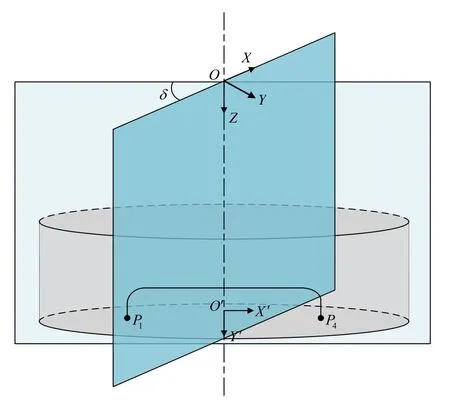
图5 轨迹坐标变换
5 结语
Delta机器人的运动特点为非线性、高度耦合及随时间不断变化,这就使它的运动学正向求解研究一直以来是难点[5]。本文以Delta机器人末端执行器的运动及其运动空间为研究对象,在不受系统复杂性或外部扰动影响的情况下,通过参数修正模式进行轨迹规划,获得连续平滑的运动轨迹。经样机测试,轨迹完成总时间T缩短至0.2 s,振动值趋近于极小。
[1] Afroun M, Chettibi T, Hanchi S. Planning optimal motions for a DELTA parallel robot[C]. 14th Mediterranean Conference on Control and Automation, 2006: 28-30.
[2] Hao Xiuqing, Sun Lei. Trajectory planning and simulation of a new symmetric parallel mechanism with three translational DOF[J]. International Conference on Measuring Technology and Mechatronics Automation, 2009(2): 424-427.
[3] 林仕高,刘晓麟,欧元贤.机械手笛卡尔空间轨迹规划研究[J].机械设计与制造,2013,3(3):49-52.
[4] 霍伟.机器人动力学与控制[M].北京:高等教育出版社,2005.
[5] 肖南峰.工业机器人[M].北京:机械工业出版社,2011.
Research on Motion Optimization of Delta Robot
Xiong Beihua1Zhou Lei2Liang Jianan1
(1.Guangdong Institute of Intelligent Manufacturing 2.South China Robotics Innovation Research Institute)
Trajectory planning is to design the trajectory of the end effector of Delta robot, in order to ensure the high-speed, smooth and accurate motion of Delta robot. Taking the Delta robot prototype test and analysis as the foundation, conducts the research to the trajectory of the end effector. The trajectory is optimized by the parameter correction mode, which is not only uniform smooth, short period and weak impact, but also improve the running speed of Delta robot.
Delta Robot; Trajectory Planning; Parameter Correction Mode
熊倍华,男,1974年生,总工程师,主要研究方向:工业机器人、高速电主轴等。E-mail:xbh007@126.com
周磊,男,1982年生,博士研究生,主要研究方向:生产智能控制。E-mail:94718766@qq.com
梁佳楠,男,1989年生,硕士研究生,主要研究方向:机械制造工艺与设备。E-mail:561295016@qq.com
猜你喜欢
内燃机与配件(2022年19期)2022-12-02
液压与气动(2022年10期)2022-11-27
汽车实用技术(2022年15期)2022-08-19
中国特种设备安全(2022年4期)2022-07-08
Journal of Palaeogeography(2022年1期)2022-03-25
快乐语文(2021年35期)2022-01-18
房地产导刊(2020年6期)2020-07-25
汽车维修技师(2019年2期)2019-08-23
计算机与网络(2018年4期)2018-09-10
中国棉花(2017年10期)2017-11-04
