
PLC的二自由度并联机械手设计
2017-05-11 06:26张小杭
绍兴文理学院学报(自然科学版) 2017年1期
张小杭
(金华职业技术学院 信息工程学院,浙江 金华321017)
PLC的二自由度并联机械手设计
张小杭
(金华职业技术学院 信息工程学院,浙江 金华321017)
二自由度并联机械手采用平行四边形结构,工作台保持始终地面平行,现在已经广泛用于各类工业现场.针对二自由度并联机械手的结构特点及控制要求,给出了基于PLC的机械手设计方案,包含机械结构设计、PLC伺服控制系统设计以及人机界面设计等环节.PLC伺服控制系统设计包含硬件、软件设计和相关参数设置,通过样机试制,实现了对工件快速抓放和移动.
二自由度并联机械手;轨迹规划;PLC;伺服控制
同串联机械手相比,并联机械手具有刚度大、承载能力高、精度高、结构紧凑等特点,特别适合工作空间较小 、负载不大的应用场合.最近几十年国内外学者对并联机械手的特点、机构学、运动学方面进行了广泛、深入的研究,并且对这方面取得的成果进行了详细概括和总结[1-2].
二自由度并联机械手是并联机械手的一个研究分支,一般研究其运动学、动力学、奇异性和工作空间,以及并联机械手机构的运动控制.
本文采用一种二平动自由度高速、轻型并联机械手—Diamond机构[3]设计并实现二自由度并联机械手,对其机械机构运动控制进行研究.该二自由度并联机械手采用平行四边形结构,限制了其末端产生的旋转运动,使工作台保持稳定.
为了实现该二自由度并联机械手的运动控制,设计了并联机械手控制系统的硬件和软件.采用三菱Q系列PLC和QD75定位模块作为控制单元,采用MR-J3-10A伺服驱动器作为伺服电机驱动单元.软件方面设计了人机界面程序、PLC主程序以及伺服电机的控制算法程序等.
PLC使得并联机械手的运动轨迹和控制更加科学化、人性化.可自动按程序完成工件的检测、抓取、放置,按照设定的轨迹进行工作,保证了两个伺服电机、主轴、从动轴等各执行构件的动作相互协调,系统运行可靠.因此,无论从生产效率方面,还是从工件抓取的误差等方面,都表现出良好的应用效果.
1 机械手结构设计
如图1所示,Diamond机构由两条对称的全铰接运动链组成,各支链分别由一台伺服电机经减速器带动主动臂围绕主动关节转动,主动臂带动从动臂,进而带动动平台运动,主动臂和从动臂分别构成两个平行四边形,进而使得动平台在平面内做二维平动.
整个结构通过动平台与机架连接,当机构需要在与运动平面正交的纵向运动时,则通过伺服电机驱动丝杠带动静平台,进而带动整个机构完成进给运动[4].
动平台末端可以根据生产中的实际需要来安装不同形式的手爪.图2为依据负载要求设计完成的机械手总装图.


图1 二自由度并联机械手结构


图2 二自由度并联机械手总装图
2 PLC控制系统硬件设计
2.1 PLC控制系统结构及工作原理
系统主要由PLC控制器、定位模块、伺服放大器、伺服电机以及触摸屏人机界面等几部分组成,系统框图参见图3.
伺服控制系统能够做到实时改变伺服电机的旋转速度及加、减速时间,使机械手抓取工件按照指定轨迹运动到目的地上.
在系统的控制中,加入触摸屏的使用,让操作更方便,用设计好具有操作功能的触摸屏界面接入到24V的电源,同时与PLC通信,起到控制及监控的作用.

图3 PLC控制系统框图
2.2 PLC控制系统电气原理
本系统采用三菱Q系列PLC和QD75定位模块作为控制单元,采用MR-J3-10A伺服驱动器作为伺服电机驱动单元.连接两台型号为HF-KP13的伺服电机,具体电气线路参看图4所示.
在定位模块里有具体的参数设置通过PLC读取,发送至伺服放大器MR-J3-10A,最终驱动伺服电机执行设定的动作.
相关参数设定一一对应,按照设定的参数实现机械手的轨迹运动.放大器的通断,.机械手的伺服电机参数设置如表1所示.
通过分析,确定系统的输入信号有个按钮、2个传感器开关;输出信号1个,电磁铁.具体PLC的I/O分配如表2所示.
表1 伺服电机参数设计

运行模式控制方式加速时间编号定位地址um圆弧地址um指令速度mm/min1:连续0:结束01h:ABS直线11/1000-1000001600001/1000-200002800001/1000000110000

图4 PLC控制系统电气原理图
表2 I/O分配表

输入部分输出部分元件地址功能元件地址功能按钮SB1X30启动按钮电磁铁Y40电磁铁手抓按钮SB2X32停止按钮传感器SQ1U0G816.5轴1近点狗到位传感器SQ2U0G9165轴2近点狗到位
3 PLC程序编制
依据移位所走的路径,PLC计算出每个插补点的坐标,再将坐标位置送QD75定位模块,最后按照定位参数的设置进行系统定位,包括位置控制、速度控制、速度位置的切换控制等其他控制.
在原点回归方面,手动回原点,JOG运行自动状态下,启动后进行工件检测,若检测,两轴手臂对工件进行抓取和放下.根据系统实现的功能编写程序,图5为程序的流程图.

图5 PLC控制系统程序流程
4 系统参数整定
伺服系统内部参数设置见表3.
表3 伺服系统内部参数设计
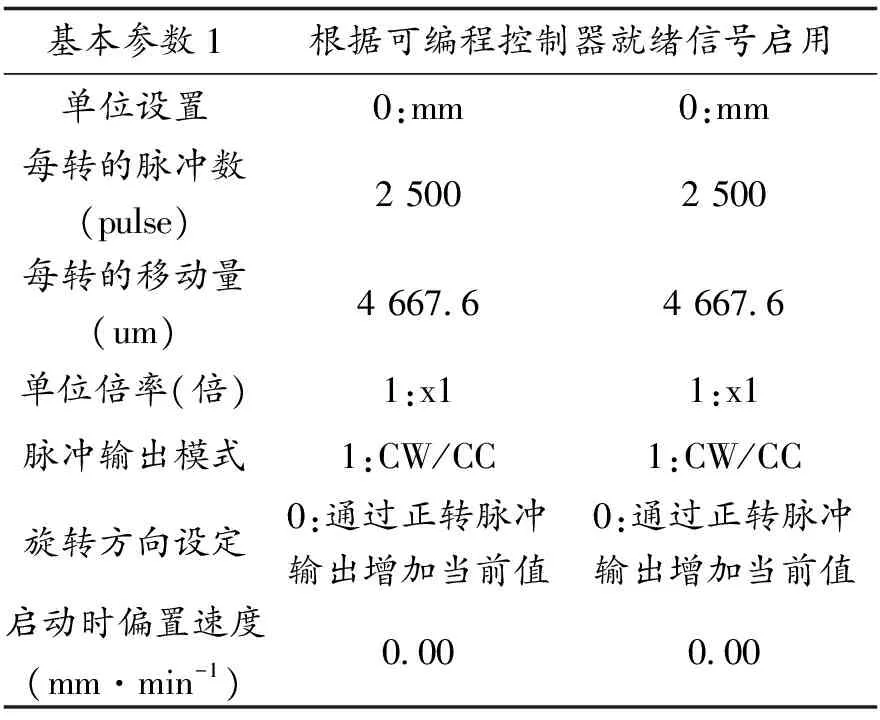
基本参数1根据可编程控制器就绪信号启用单位设置0:mm0:mm每转的脉冲数(pulse)25002500每转的移动量(um)4667646676单位倍率(倍)1:x11:x1脉冲输出模式1:CW/CC1:CW/CC旋转方向设定0:通过正转脉冲输出增加当前值0:通过正转脉冲输出增加当前值启动时偏置速度(mm·min-1)000000
续表3 伺服系统内部参数设计

基本参数2根据机械设备和相应电机,在系统启动时进行设置速度限制值(mm·min-1)200000200000加速时间/ms10001000减速时间/ms10001000
5 人机界面设计
在设计伺服电机控制系统中,用触摸屏代替按钮来操作.系统工作时的触摸屏界面包括主界面、参数设置界面和控制界面以及监控界面.如图6所示为系统主界面.
触摸屏操作步骤如下:
(1)在系统调试之前先将触摸屏程序导入触摸屏中,以实现控制系统的调节.
(2)进入开始画面,触碰画面的任意地方进入系统主界面
(3)点击系统主界面里的“外围启动”,将外围启动开关导通,给驱动器上电.
(4)在系统主界面中,按下启动按钮,系统按照制定的运动控制运行.

图6 机械手控制人机界面
6 系统调试
在硬件线路接好并在断电条件下,按照电路图要求,将PLC和外部设备通过航空插座相连,同时将PLC和编程计算机、变频器相连,并将触摸屏和编程计算机相连.将系统所有设备接通电源后,PLC在计算机的监视下运行用户程序.观察系统运行动态是否符合设计要求.
(1)触摸屏上必要的参数输入,放大器接通后,按下启动键,且检测信号x8闭合时,将检测到工件到起始位.X轴、Y轴进行定位,开始运动,机械手左移,到达左移点时,传送带停止运动.机械手平台上的电磁铁将工件吸取.第一步定位完成.
(2)当检测到工件成功吸取后,X、Y轴同时定位抬高,到待定位点.同时,传送带继续转动,待下一步定位.第二部定位完成.
(3)当机械手到达待定位点时,机械手右移,到达右移点时,传送带停止运动.机械手平台上的电磁铁将工件松放.第三部定位完成.
(4)当定位结束后,而后伺服电机执行回原点动作,定位启动按键断开,按下“回原点”按键,近位开关将回到起始位置,结束本次定位.
7 结语
并联机械手由于诸多的优点成为现在研究领域的热点,其结构的复杂性增加了控制的难度.因此,我们在设计二自由度并联机械手的基础上,使用了虚拟机械手示教的方法实现对现实并联机械手的控制.首先对二自由度并联机械手零件进行三维建模并进行零件的虚拟装配,对三维模型进行运动仿真和干涉检测之后进行模型的优化,利用优化了的三维模型SolidWorks进行零件工程图的输出,现实二自由度并联机械手的搭建.使该并联机构可以实现其末端执行器的平面运动.同时设计了一套符合控制要求的运动控制系统,二自由度并联机械手的控制.本设计的主要创新点如下:
(1)在平面二自由度5R并联机构的基础上增加了一个平行四杆的运动链,设计了一种新型的二自由度并联机械手机构.
(2)针对三菱伺服电机HF-KP13和三菱伺服放大器MR-J3-10A,使用三菱Q系列PLC进行编程、实现系统的控制调节,从而有效的控制电机的速度和位置的控制.
(3)实现了伺服电机的同步控制,使两个伺服电机的运动状态.通过对二自由度并联机构进行运动学模型和动力学模型分析,有效的轨迹规划,确定了两个电机的主动输入角度转动方向和速度大小.
[1]李艳,王勇,陈正洪,等.并联机械手智能控制研究现状[J].机床与液压,2008(12):180-183.
[2]杨斌久,蔡光起,罗继曼,等.少自由度并联机械手的研究现状[J].机床与液压,2006(5):202-205.
[3]王冰,韩文仲.平面2自由度平动并联机械手的性能分析[J].机床与液压,2010(10):85-87.
[4]李占贤,黄田,梅江平.二平动自由度高速轻型并联机械手控制技术研究[J].机械手,2004(1):63-68.
(责任编辑 邓 颖)
Design of a 2-DOF Parallel Manipulator Based on PLC
Zhang Xiaohang
(School of Information and Engineering, Jinhua Vocational and Technical College, Jinhua, Zhejiang 321017)
The 2-DOF parallel manipulator, now widely used in varied industrial fields, applies the parallelogram structure so that it can always keep the worktop parallel to the ground. Grounded on the structural characteristics and control requirements of a 2-DOF parallel manipulator, this paper presents a design scheme of PLC-based 2-DOF parallel manipulator. The scheme includes the mechanical design, manipulator trajectory planning, PLC servo control system design and human-machine interface design. The paper also gives the hardware design, software design and parameter settings of the PLC-based servo control system. By prototype trial, the robot can fast pick and place work pieces. It follows that it has a good practical application value.Key words:2-DOF parallel robot; trajectory planning; PLC; servo control
10.16169/j.issn.1008-293x.k.2017.07.008
TP241
A
1008-293X(2017)07-0047-05
2016-01-22 作者简介:张小杭(1971- ),男,浙江金华人,金华职业技术学院讲师,研究方向:运动控制、工业机器人等.
猜你喜欢
微特电机(2020年11期)2020-12-30
装备制造技术(2019年12期)2019-12-25
制造技术与机床(2018年11期)2018-11-23
电子制作(2018年17期)2018-09-28
知识就是力量(2018年7期)2018-07-11
通信电源技术(2018年3期)2018-06-26
制造技术与机床(2017年4期)2017-06-22
工业设计(2016年6期)2016-04-17
通信电源技术(2016年1期)2016-04-16
河南科技(2014年11期)2014-02-27
