基于多颜色通道组合的UVI空间农作物阴影去除方法
2017-05-11 15:31岳有军赵文佳赵辉王红君
江苏农业科学 2017年6期
关键词:直方图
岳有军++赵文佳++赵辉++王红君
摘要:为了有效地解决基于机器视觉的农业机器人在作业任务中受阴影对农作物识别造成的干扰问题,提出一种基于组合的颜色空间,通过较简单的分割方法可以在组合空间中消除阴影。该方法首先将RGB颜色空间下的图像转换到LAB、YUV和HSI中,获得图像在每个颜色空间中的分量;然后利用直方图、熵值、均方误差和峰值信噪比分析各颜色通道特性,选择合适的颜色通道进行组合。对组合颜色空间进行仿真数据分析,筛选出适合于农田环境下阴影去除的UVI空间。通过与包含阴影的不同颜色空间中的图像进行对比试验,说明颜色空间可以经较简单的算法实现图像中阴影的去除,证明该颜色空间对农田环境下阴影去除的有效性、抗干扰性。
关键词:颜色空间;阴影去除;熵值;峰值信噪比;直方图;均方误差
中图分类号:TN911.73文献标志码:A文章编号:1002-1302(2017)06-0196-05
基于视觉的农业机器人是当前农业机械化、精确化发展的趋势,其核心是对采集到的农田图像进行快速、准确的分析。在自然条件下,由于植株相互遮挡以及太阳入射角的影响,复杂的农田环境对采集图像常常产生很多干扰,阴影是农田环境下目标识别的主要干扰因素,使得农田中植株识别、颜色提取和阴影区杂草去除等作业任务困难化,从而降低图像中识别的准确性,同时影响机器人工作效率。因此,有必要对自然状态下获取的图像进行预处理、阴影检测并去除图像中的阴影[1]。
针对环境中阴影干扰农作物识别的难题,国内外许多学者都进行了相关的研究。常见的阴影去除算法有基于某一颜色空间下,在该颜色空间下研究阴影区与其周围非阴影区的特性[1],通过对这些特性进行分析,来达到消除阴影的目的。Finlayson等提出了基于二维积分的阴影去除算法来获得消除阴影的图像[2-3],其优势在于很好地保留阴影区域的细节,有较好的视觉效果,但不足之处在于运算复杂度高,而且造成部分细节失真,导致人为干扰因素[4]。部分学者通过阴影补偿方法,将图像中独立阴影区与周围的非阴影区进行区域匹配,来完成消除阴影[5]。张华南等提出在单一YUV颜色空间下进行阴影检测与去除,在获得Y通道强度的情况下采用闭值法寻找阴影区域,对该区域光照强度补偿,然后返回RGB颜色空间中消除阴影[6]。该方法没有去除阴影区的边缘效应,在目标识别中仍然存在干扰。张杰等认为阴影区与非阴影区像素点的RGB值之比是一个常量[7],Barnard等提出了基于颜色比率的阴影去除方法[8-9],该算法虽然在阴影去除上得到一定的效果,但是由于其算法较复杂,在背景纹理复杂的情况下,容易造成识别错误。综合以上几种不同的方法,可以看出,针对图像中存在阴影去除问题取得了一定研究成果,但是仍然存在许多不足之处:算法复杂性、实时性差和阴影区域图像细节丢失等缺陷问题,所以有必要对阴影问题加深研究。
对于农田中阴影区域下的农作物的识别问题,本研究采用了一种简单的方法来实现去除阴影。该方法是将单一颜色空间下的图像转换到多颜色空间中,在不同颜色通道中获取图像特性;利用直方图、熵值、均方误差和峰值信噪比得到仿真数据来分析颜色通道特性,构造出适合农田场景下的阴影去除的颜色空间,即UVI颜色空间,该空间可以利用简单的算法来实现较好的去除阴影,实现图像中对农作物的识别目的。
1多颜色空间转换
本研究提出将一幅图像转换到不同颜色空间,经过分析不同通道的特性,对组合图像进行分析,得到不受阴影干扰的组合颜色空间。该方法选择RGB、HSI、YUV和L*a*b*颜色空间,将采集到的RGB农田环境图像转化到其他颜色空间下,通过分析、组合、仿真和检验来说明组合空间的去阴影效果。各颜色空间之间的转换如下:
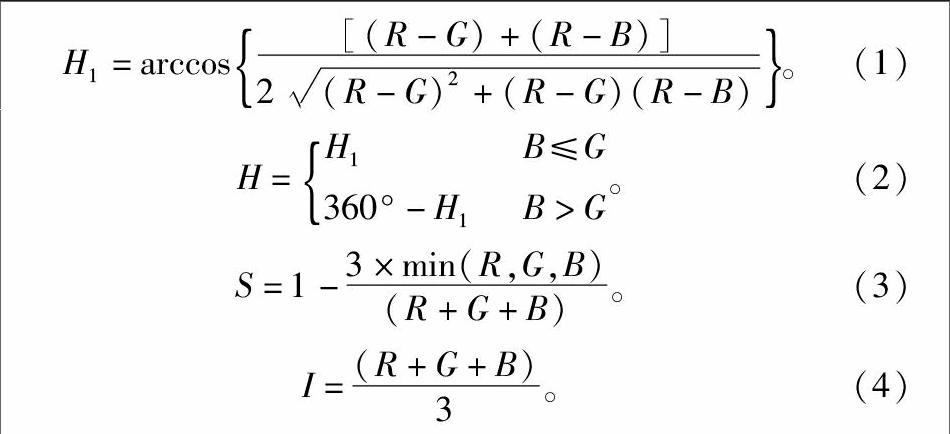
(1)HSI是从人的视觉系统出发,用色调(H)、色饱和度(S)和亮度(I)来描述色彩[10]。RGB颜色空间转化为HSI颜色空间的算法如下:
(2)L*a*b*颜色空间要比RGB、HSI颜色空间大,说明L*a*b*空间可以包含RGB与HSI所能描述的色彩信息[11]。L*a*b*颜色空间中L*为亮度;a*正表示红色,负表示绿色;b*正表示黄色,负表示蓝色。RGB颜色空间转化为L*a*b*颜色空间的算法如下:
(3)YUV是欧洲电视系统所采用的一种颜色编码方法,Y表示明亮度,U和V則表示彩色的2个分量,作用是描述影像色彩及饱和度,用于指定像素的颜色[12]。RGB颜色空间转化为YUV颜色空间的算法如下:
2多颜色空间的分析方法
通过颜色空间的转换,得到各颜色通道的分量,为了合理利用颜色通道中包含的信息及缩短图像分析的时间,保证图像处理的实时性,利用图像所包含的有效信息量、像素分布等特点,从图像的均方误差、峰值性噪比、灰度图像熵值和直方图这4个方面对颜色空间的不同通道进行组合分析,并得到去阴影效果良好的组合空间。
(1)均方误差(MSE),是权衡“平均误差”的一种较方便的方法,用来评价图像中包含数据的变化程度。定义为:
3结果与分析
3.1多颜色通道的分析结果
以图2中RGB原图为数据,对原图进行颜色空间的转换,得到各颜色空间下的分量。通过Matlab 7.0对各颜色通道进行数据分析。
在信息论中,熵越小,不确定性就越小,信息量越大。从表1分析各颜色空间所包含熵值大小,判断各颜色通道所包含的信息量的有效性是合理的,同时结合HSI空间中I分量与图像的色彩基本无关联的特点,选取I、a*、b*、U、V 5个颜色通道进行组合。
从图3至图10的灰度直方图分析组合颜色空间:(1)组合颜色空间的直方图窄而集中于灰度级的中部,说明其全部为低对比度图像;(2)从图3至图8可以看出相同的颜色通道的不同顺序组合表现出不同的灰度直方图,说明其中包含不同的信息。从其背景与前景有很好的峰谷间隙可以说明图8、图9和图10这3个组合颜色空间有较好的可分割性。通过直方图无法进一步分析出它们颜色空间的其他特点。
从表2分析进一步说明:(1)UVI颜色空间的熵值最小,其包含信息量大,信息越有效;(2)峰值信噪比反应整个图像的失真程度,峰值信噪比愈大的图像其质量愈高,同样说明UVI的图像质量较高;(3)均方误差反映数据的变化程度,可以看到UVI颜色空间的变化程度最小,精度高。综合以上所有的数据结果可以得到UVI组合颜色空间在图像评价中有较好的特性。
3.2多颜色空间对比结果
3.2.1對图2 RGB图像进行仿真试验为了进一步说明UVI组合颜色空间对含有阴影的农田图形的有效性, 本研究
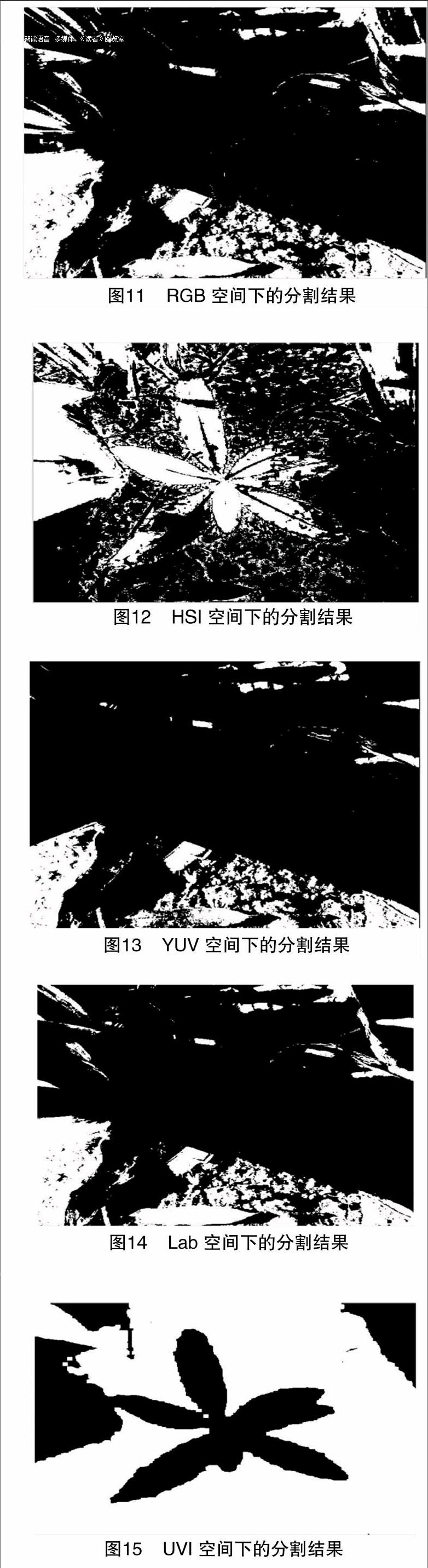
通过使用Matlab 7.0编程软件对包含阴影图像进行仿真试验对比。通过对同一幅图像在不同颜色空间下按照相同的算法流程进行分析,得到不同的分割效果图,来验证UVI组合颜色空间在阴影去除中的优越性。
通过对常见的颜色空间与UVI组合颜色空间进行图像分割的仿真对比,得到图11至图15的分割图像,从这些分割图像中可以很清晰地看到阴影对农田中农作物识别带来的干扰问题。图12可以看到HSI空间各颜色通道的独立性表现出较好的处理效果,但是仍然受到阴影干扰,不能很好地分割图像中的目标。从图15中可以明显地看到UVI组合颜色空间对图像中的阴影和噪声等干扰因素有较好的处理能力,对图像中农作物识别有很大的帮助。
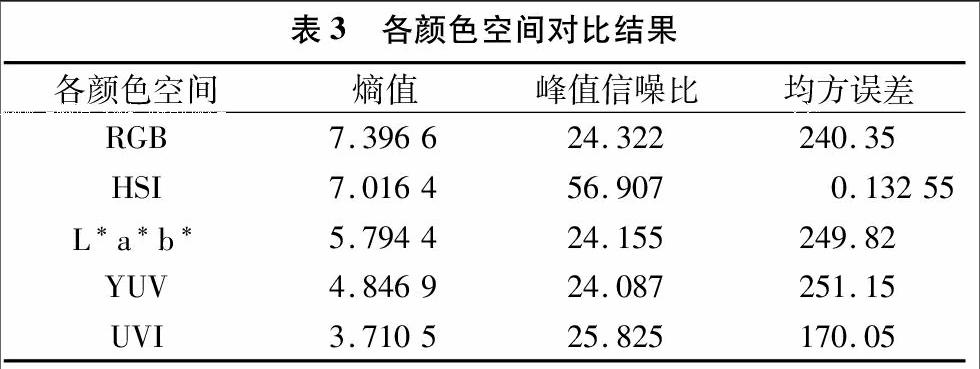
从熵值、峰值信噪比和均方误差3个方面的数据对比各颜色空间的特性(表3),结果表明:(1)HSI颜色空间在峰值信噪比与均方误差表现出特殊性但是其熵值较大,所包含的信息量少,说明其包含较多的干扰因素;(2)UVI组合颜色空间的熵值最小,说明其包含信息量在这5个颜色空间中最大,有效信息越多;(3)表3中除HSI外,UVI组合颜色空间的峰值信噪比最大,说明图像质量愈高,对阴影、噪声的滤除效果最好,图像分割质量越高;(4)均方误差反映数据的变化程度,表中除HSI外,UVI组合颜色空间的均方误差最小,同样
说明UVI组合空间的稳定性。
3.2.2对深度阴影进行检验性仿真试验为了进一步说明组合颜色空间对图像中阴影的去除有效性,进行了深度阴影图像的分割仿真试验。
图16是RGB空间下深度阴影的农田作物图像,由于该图中阴影较之前图像有很大加深,图像中的目标识别难度也相应增加。该图像经过颜色空间的转换得到UVI空间,在该颜色空间下对图像进行处理得到了图17,通过对其分析可以看出本研究方法对深度阴影同样有很好的去除作用,说明UVI空间对图像中的阴影进行了较好地去除,可以较好地识别图像中的农作物。
4结论
本研究通过对4个颜色空间的12个颜色通道进行熵值分析,选取了I、U、V、a*和b* 5个颜色通道进行颜色空间的组合,对组合的颜色空间进行分析可得:(1)将U、V和b* 3个颜色通道组合,当其组合的顺序不同,表现出不同的灰度直方图和熵值,说明其包含的图像信息不同。(2)通过对UVa*、UVb*和UVI 3个不同颜色组合空间进行灰度直方图、熵值、峰值信噪比和均方误差的仿真数据比较,得到特性较好的UVI组合颜色空间。(3)通过对同一幅在不同颜色空间中表达的图像进行传统图像处理的仿真试验,通过比较不同颜色空间下的分割结果,证明UVI组合颜色空间在农田阴影环境的去影优势。
参考文献:
[1]王宁. 图像的阴影检测与去除算法研究[D]. 北京:北京交通大学,2008.
[2]Finlayson G D,Hordley S D,Drew M S. Removing shadows from images[M]. Berlin:Springer Heidelberg,2002:823-836.
[3]Finlayson G D,Hordley S D,Lu C,et al. On the removal of shadows from images[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2006,28(1):59-68.
[4]刘堂海. 概率学习像素分类法去除农作物视频中阴影[D]. 重庆:西南大学,2009.
[5]杨俊,赵忠明. 基于归一化RGB色彩模型的阴影处理方法[J]. 光电工程,2007,34(12):92-96.
[6]张华南,冯全,杨梅,等. 基于YCbCr颜色空间的叶片阴影检测与去除[J]. 计算机系统应用,2015,24(11):262-265.
[7]张杰,丁广太. 运动人体阴影检测算法[J]. 计算机工程与设计,2010,31(7):1519-1522.
[8]Barnard K,Finlayson G D. Shadow identification using colour ratios[C]. Color and Imaging Conference,2000:97-101.
[9]Levine M D,Bhattacharyya J. Removing shadows[J]. Pattern Recognition Letters,2005,26(3):251-265.
[10]马大江. 基于图像内容的结构相似性质量评价研究[D]. 西安:西安科技大学,2013.
[11]王鑫芯. 高动态范围与雾天彩色图像画质增强方法研究[D]. 厦门:厦门大学,2011.
[12]孙承琦. 基于视觉的机器人环境感知系统研究[D]. 天津:中国民用航空学院,2004.
[13]李连胜,陈晚华. 基于MATLAB的数字图像质量评价[J]. 湖南科技学院学报,2005,26(5):176-177.
[14]周浩宇. 基于生物视觉模型的图形图像处理方法[D]. 长沙:中南大学,2012.
[15]范瑾. 复杂背景下的对象特征提取[D]. 保定:华北电力大学,2007.何玲,陈长喜,许晓华. 基于物联网的生猪屠宰监管系统关键技术研究[J]. 江苏农业科学,2017,45(6):201-204.
doi:10.15889/j.issn.1002-1302.2017.06.052
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
电子元器件与信息技术(2021年8期)2021-12-13
天津医科大学学报(2021年1期)2021-01-26
计算机应用(2020年11期)2020-11-30
安徽电子信息职业技术学院学报(2020年5期)2020-11-13
摄影之友(影像视觉)(2018年12期)2019-01-28
电子设计工程(2018年16期)2018-08-25
现代工业经济和信息化(2016年19期)2016-05-17
潍坊学院学报(2016年6期)2016-04-18
计算机工程(2015年8期)2015-07-03