基于计算机视觉的植物行为感知研究综述
2017-05-11 14:38祁卫宇王传宇郭新宇
江苏农业科学 2017年6期
祁卫宇+王传宇++郭新宇

摘要:在植物整个生命周期中,植物的各个器官时刻发生变化,实时动态地观测植物形态变化对进一步研究外界环境对植物产生的影响以及植物内在生长机制具有重要意义。本文首先阐述了植物行为感知的概念,对植物行为感知领域作了比较详细的论述,从基于计算机视觉的植物行为感知方法及应用2个方面回顾了该领域的发展现状,最后分析总结了目前存在的主要问题及可能的发展方向。
关键词:植物行为;感知;计算机视觉;长势获取;数字植物
中图分类号: S126文献标志码: A文章编号:1002-1302(2017)06-0020-07
植物是自然界中最常见的景观之一,与人类的生产、生活密切相关。但是由于植物具有复杂的形态结构和生命特性,很大程度上限制了人们对植物的认知过程。日本的Morimoto等认为,植物是“speaking plant(会说话的)”,与动物一样,研究者可以通过感知植物行为加深对植物的认识,即人们能够根据植物的某些生理或表观指标判断它们对外界环境的反应及自身的生长状态,而植物行为是指植物某个生长阶段或整个生命周期个体各器官或群体由于自身生长或外界环境刺激所产生的形态变化[1]。感知则是指通过某种技术手段获取能够表现这种形态变化的特征指标。植物生长环境比较复杂,它们对光温水气热以及養分的变化都可以通过内在生理信息或外部物理形态表现出来,所以人们可以利用传感器监测植物的生长,实时地获取植物的行为信息,并通过控制器结合人工智能(如神经网络、遗传算法和专家系统等)方法实现对植物生长环境的智能化控制。Fleisher等也提出了1种基于知识和信息的管理园艺系统,建立植物生产工程系统概念,其实也依赖于计算机视觉对植物行为信息的获取[2]。
图像处理与计算机视觉技术可以实现对植物形态连续、无损的监测,并且数据获取方便快捷,再加上近年来人工智能、计算机视觉的快速发展,基于计算机视觉的植物行为感知技术已广泛应用于植物的长势信息获取、植物三维建模及生长模拟、植物动画合成等领域,因此对其研究具有重要意义。
20世纪70年代以来,人们就开始研究监测植物行为的方法,尽管近年来国内外基于计算机视觉的植物行为感知研究取得了重要进展,但由于植物生长环境的高复杂性和多变化性,使得识别的精确性和高效性并没有完全满足相关行业的实用要求,总体来说基于计算机视觉的植物行为感知中的挑战主要来自以下2个方面:
(1)空间复杂性。植物自身形态十分复杂,分布不规则,在形状、尺寸、方向和角度方面都存在很大差异,在不同光照、视角条件下会呈现出不同的形状,在不同场景中相同的植物在姿态和特性上也会有很大不同。此外,植物群体之间遮挡、个体差异等问题都是植物行为复杂性在空间上的表现。空间复杂性主要影响植物行为感知结果的准确性。
(2)时间差异性。时间差异性是指植物本身各器官形态、颜色在整个生命周期内不断发生变化,每个阶段重点解决的问题不尽相同。比如在苗期,主要解决的问题是植物与背景的分割,而在成熟期主要解决的问题则是相互遮挡。与此同时,植物生长过程中变化比较缓慢,要求植物行为感知过程中能够辨别各个阶段的起止时间,对各个时期进行更加细致的分析,根据植物本身各个阶段的特点,开发专门的软件算法,以达到去除人为干扰因素、降低人力成本投入的目的。时间差异性不仅对识别精确性产生影响,也会影响识别的高效性。
1植物行为感知方法
植物行为复杂多样,除了生长发育所引起的自身形态变化外,植物在外界复杂环境下的运动也千变万化,如风雨中树木的摇摆等,因而如何才能真实快速地感知植物行为是很多科研人员追求的目标之一。
1.1基于二维图像
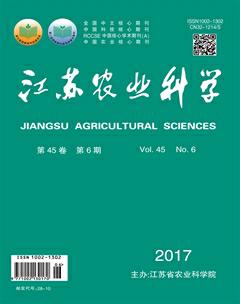
基于二维图像感知植物行为即直接提取目标对象的颜色、纹理、轮廓等二维图像特征,再结合统计数据获取与植物生长有关的信息。Seginer等研究发现,成型番茄叶片的运动与缺水情况、二氧化碳吸收率存在明显的线性关系,叶尖的运动可以作为植株需水情况的指标[3]。Kim等通过多光谱相机分析植物叶片的光谱特征进而识别水分胁迫的发生情况和程度,他们首先选择5组不同含水量的水培养苹果幼苗,然后采用数码相机和多光谱相机定期获取植株图片,并分析多种光谱指数与胁迫反应程度的关系[4]。结果发现,在705~750 nm 波段内的红边归一化植被指数和在680~800 nm波段内的归一化植被指数具有最高的相关性,该方法表明多光谱图像可以为植物胁迫反应探测与管理提供有效指标[4]。Lee等用数字图像分析法判别植物生长和氮素营养状态,该方法分别在3年时间内定期获取不同营养条件下4种水稻品种抽穗之前不同生长时期的图像,与此同时抽样获取叶面积指数、地上部分干质量和氮素积累量,并通过图像分析获取冠层覆盖度和10种颜色指标;统计数据表明,冠层覆盖度和8种颜色指标与植物生长和氮素含量有明显的相关性,其中冠层覆盖度和叶面积指数、地上部分干质量及氮素积累量3个指标呈负指数关系,表明基于计算机视觉技术可以无损地识别不同发育期、不同生长状态的水稻[5]。Yu等采用计算机视觉技术自动识别检测玉米的发芽期和3叶期,并提出1种亮度近邻传播聚类算法(AP-HI)从背景中提取植株图像,根据植株空间分布特征判断发芽期,然后使用骨架端点描述幼苗叶片,并通过概率估计判断3叶期,监测结果与人工方法无差别,可以满足实际应用需求,指导农事生产[6]。Wouters等采用多光谱相机在开花前监测梨树的花芽,首先获取植株的多光谱图像,通过典型相关性分析生成光谱判别模型检测属于花芽的像素,最后通过图像分析算法估计植物花芽的数量[7]。Han等提出基于户外自然条件下拍摄的图像,判别蓝莓果实不同的生长阶段,首先根据果实成熟度将其分为4个不同的阶段,然后通过人工选取不同成熟度果实的像素建立训练集,最后采用不同的分类器对其进行分类,其中K最近邻分类算法(KNN)可达到85%~98%的准确率,表明基于计算机视觉的有效性[8]。Yeh等设计了1套叶菜类生长自动测量系统,该方法将双目摄像头安装在滑动轨道上,获得生菜植株的全景图像,基于颜色特征提取植物轮廓,最后计算叶面积,并绘制生长曲线[9],该系统在实际应用中具有广阔前景,处理过程见图1。Eren等提出采用红外图像序列跟踪植物叶片生长的方法,首先采用红外双目摄像机获取植物图像,并由此计算其深度信息,根据颜色信息去除背景,然后根据颜色和深度信息采用超顺磁聚类方法分割不同叶片,再通过构选叶片形状特征描述子对过分分割的叶片合并修复,通过计算整个植株的中心和每个分割部分的中心,确定各个部分的方位角并对其进行跟踪,统计角度直方图,通过阈值分割,将角度相近的不同部分进行整合,最后对跟踪的叶片分割进行椭圆拟合,估计每张叶片的生长曲线,实现对长势的动态跟踪[10]。
1.2基于三维信息
植物的三维图像包含了比二维图像更丰富的植物生理信息,然而由于目前采集技术的制约,三维数据采集是比较困难的。随着图像采集仪器的快速发展,图像处理技术由二维转变为三维已成为必然趋势。采用计算机视觉获取植物三维信息通常指通过对1幅或多幅图像的分析和处理,获得图像中物体三维几何描述[11]。通过分析植物叶片的三维结构,不仅可以获取植物蒸腾作用、光合作用强度等重要信息,三维图像信息还可以作为植物胁迫反应的指标,进而判断植物的生理状况,有助于研究者更好地了解植物的胁迫反应机制。
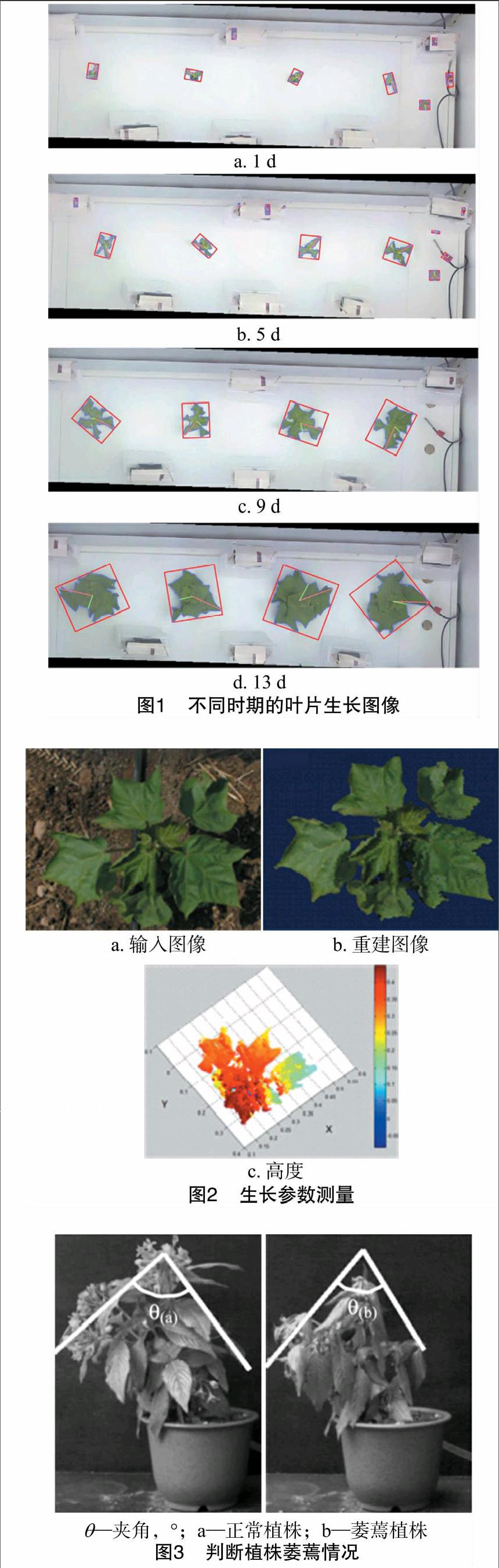
Ran等利用立体视觉技术通过色调不变性变换提取作物轮廓,然后基于能量最小化方法优化特征点的匹配,完成对植株的三维重建,最后基于植株的三维模型,获取株高、叶面积、生物量的生长参数,结果较为准确,效果见图2[12]。Cai等基于叶片的三维图像和由二维傅里叶变换定义的萎蔫指数感知叶面的干枯状况,试验结果表明,萎蔫指数与环境温度、光合有效辐射均具有明显相关性,能够作为叶片干枯的指标,但该指标只适合某些阔叶类植物[13]。Mizuno等提出1种利用计算机视觉判断植物萎蔫的方法,首先利用田间远程监控设备获取植株的彩色和立体视觉数据,对叶片稠密的植株,计算叶片区域面积、叶片最小包围矩形面积以及左右最远点与最高点之间的夹角3个指标;对叶片稀疏的植物,通过双目图像恢复叶片三维数据,并计算其下垂角度,进而判断其是否萎蔫,并通过控制周围设备自动浇灌[14],结果见图3。赵燕东等借助3D扫描装置,快速获取西葫芦叶面形态的原始信息,根据不同萎蔫程度的叶片形态3D测量数据,对叶片分形维数分
别结合土壤温度与光照度分析了统计相关性[15-16]。结果表明,叶片的分形维数与土壤温度、光照度都呈负相关性,并得出了三者之间的多元回归模型,因此采用图像处理技术,通过分析叶片分形维数可以有效指导农田节水灌溉[15-16]。Nielsen 等采用三目立体相机获取桃花植株图像,采用基于相关性的立体视觉算法确定桃花位置,匹配误差不超过1 cm,可用于自动花朵剔除系统[17]。陈兵旗等基于双目立体视觉对大田间玉米生长参数进行测量,通过建立玉米三维模型,实现大田玉米生长过程的三维虚拟显示[18]。王传宇等提出1种基于图像恢复农田景物的方法,該方法首先获取相机参数并以尺度不变特征变换(SIFT)匹配点的视差限制初始搜索范围,然后按像素邻域的SSD值匹配2幅图像的像素,由此获得致密的视差图,最后将二维图像像素RGB值映射到三维点云上,重建田块景观,结果表明,该方法真实再现性好,重建过程简洁,具有较高的自动化程度[19],效果见图4。
基于计算机视觉及图像处理技术,不仅可以感知植物的生长、开花、结果等发育过程,还可以根据植株形态变化,判断其胁迫反应,便于田间管理。
2植物行为感知的应用
对植物自身形态变化的研究,可获取其长势信息以及内在的生长机制,通过植物建模对其生长过程进行模拟,对植物运动的研究,可用于合成植物动画。
2.1长势信息获取
通过计算机视觉技术能方便地获取植物的二维或三维形态信息,而且可以避免传统方式工作量大、效率低、取样破坏性大等不足,通过对这些形态信息进行分析,不仅可以提取株高、叶面积、茎秆节间长度、茎叶夹角、方位角等株型指标,还可以根据叶片颜色反演叶绿素含量、氮素营养状况。
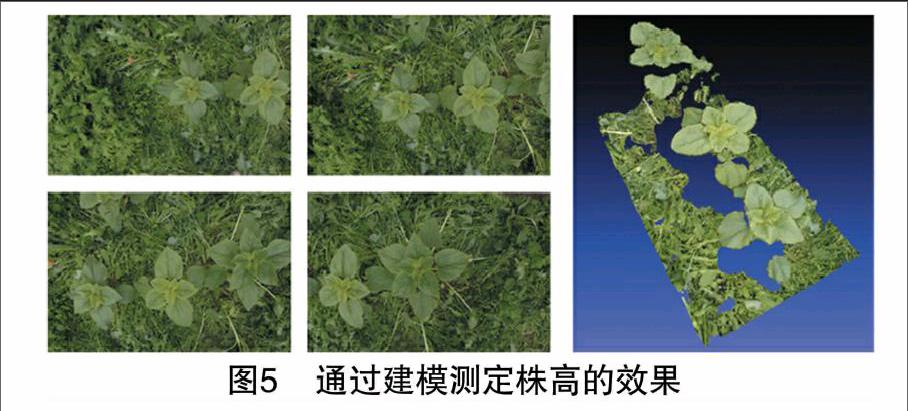
(1)个体水平上,株高是反映作物长势状况的重要指标之一,它与作物的水分缺失、营养状况、生长阶段直接相关,同时也是表征作物抗倒能力的重要指标。Casady等利用机器视觉技术提取水稻的长势信息,根据亮度差异,将水稻从背景中分割出来,利用数学形态学方法消除阴影及噪声的影响;再从二值化图像中提取水稻的宽度、高度、叶面积值,与手工测量值之间的相关性分别为0.896、0.874、0.885[20]。Jay 等通过沿着作物移动相机并采用运动恢复结构(SFM)方法构建了作物三维模型,并通过颜色和高度信息区分作物和背景,计算作物的株高和叶面积[21],效果见图5。李长缨等利用计算机视觉技术监测温室植物生长,通过对图像的分析处理,提取植物叶冠投影面积、株高等外部形态特征,该方法测量的平均株高与人工测量结果的相关系数可达0.927[22]。此研究表明计算机视觉技术应用于温室植物生长无损监测的可行性。王加强等利用图像中G元素所占比例去掉部分背景,根据其垂直和水平投影分别求出圆形容器对应方向所占像素数,然后利用参照物法测量组培苗的开展度、株高和叶面积[23]。结果表明,该系统具有较高的精确度,能够应用于组培苗生长状态的实际测量[23]。马彦平基于双目立体视觉原理,动态处理田间获取的图像并构建作物的三维信息,从而得出冬小麦、夏玉米的实时株高信息[24]。以上研究结果表明,基于数字图像处理技术获取植株株型指标可靠性强、精确度高。
(2)叶片是植物进行光合作用和蒸腾作用的主要器官,其面积大小对作物生长发育、抗逆性及产量有很大影响。He等采用双目视觉系统对组培苗总增长量进行分析,通过重建植物三维彩色图像,并根据人工选取的颜色特征,估计株高、叶面积、生物量,试验结果表明,估计量与实测值具有明显的相关性[25]。在国内,马彦平等采用数字图像处理技术对玉米叶面积进行测量:首先,用数码相机拍摄挂在墙上黏贴着玉米叶片的参照白板来获得数字图像,然后对图像阈值进行分割,通过区域像素数统计并结合图像分辨率即可获得玉米叶片实际面积,与用直尺法测量结果相关性可达0.996[26]。该方法快速准确,避免了几何畸变,但属于有损测量。龚爱平等使用图像处理技术,以Android手机为工作平台对植物叶片面积进行测量,当手机和叶片之间的距离在0.3~0.6 m时,误差小于1%,可满足多数条件下叶面积测量的应用[27]。王传宇等利用双目立体视觉系统重建玉米三维株形,并计算叶片边缘点的三维坐标,进而求取叶片着生高度、叶长、茎叶夹角等株型指标[28]。赵春江等根据2幅特定角度拍摄的图像求取植株二维骨架信息,并通过设定合理的匹配准则,利用极限约束算法实现骨架特征匹配,最终获得三维骨架信息,计算叶长、茎叶夹角等作物重要参数,误差不超过2%[29]。由此可见,用数字图像处理方法测量叶面积方便、快捷、精确度高,此外还可以通过重建植株的三维信息,对叶片结构进行分析,获取叶长、茎叶夹角等株型信息。
(3)群体层次上,作物的地上部分统称冠层,冠层结构是指冠层各组分:叶片、茎秆、花、果实等的时空分布特征,机器视觉技术具有信息高通量、操作自动化等优势,在作物冠层结构解析方面的应用已有报道。Van Henten等采用图像处理方法研究表明,莴苣叶冠相对覆盖率与其干质量之间呈线性关系,误差仅为5%,该研究对用图像处理方法预测植物干湿质量具有指导意义[30]。Kirk等通过从上方拍摄作物冠层的图像,基于红绿颜色特性估计粮食作物的叶面积指数,该方法通过红绿2种颜色定义绿度和亮度2个特征,并通过2种特征的映射变换,区分植被区域和土壤区域,并由此得出叶面积指数,结果表明该方法与LAI-2000结果近似[31]。在国内,雷咏雯等采用数码相机获取棉花不同生育期的冠层图像,基于图像处理分析了棉花不同生育期的地面覆盖度与叶面积系数、生物学产量之间的关系,结果发现冠层覆盖度可以有效预测叶面积系数和棉花生物学产量[32]。武聪玲等通过计算机视觉技术测量温室黄瓜叶冠投影面积,然后人工测量叶面积和干鲜质量,经相关性分析得出,叶冠投影面积与叶面积、茎叶干、鲜质量的决定系数分别为0.976、0.874、0.914,表明通过叶冠投影面积来预测植物的干、鲜质量的可行性[33]。王桂琴等对小麦冠层图像进行获取并分析,结果表明冬小麦冠层图像的投影面积与叶面积指数存在一定的对应关系,并建立了相关模型,该模型可以预测冬小麦叶面积指数,测量过程简单快速,不需要人工辅助[34]。以上研究表明,通过数字图像处理技术可以获得植株地面覆盖度或者叶片投影面积,并可由此估计作物生物量,简便快捷。
(4)传统的作物病虫害鉴别和诊断方法需要较强的专业知识,能够处理的病害种类有限,不够直观方便,对病虫害发病等级判断受主观因素影响较大。随着计算机视觉技术的应用和发展,利用计算机图像对作物病害图像进行分割、提取、理解、识别,为作物病害的无损检测、快速诊断提供了新的途径和方法。Zhao等提出了1种油菜叶片虫害损伤识别算法,首先采用高光谱技术提取叶片区域,然后通过洞填充函数填充叶片内部封闭的虫害区域,采用遗传小波神经网络重建算法(G-WNNRA)填充叶片边缘虫害区域,结果表明,基于 G-WNNRA方法校准模型的相关系数、决定系数分别为0998、0.953,为虫害损伤程度评估提供了有效手段[35],效果见图6。Phadikar等提出1种大米疾病类型诊断技术,首先获取病害植物图像,并基于费米能量的分割方法将感染区域从背景中提取出来,然后通过粗糙集处理感染区域的颜色、形状、位置信息,建立分类器,与其他方法对比,优势明显[36]。國内也对相关方面进行了研究,李亚兵以实际生产的大田棉花群体为研究对象,通过数码相机获取棉花冠层图像,然后利用图像处理计算与统计分析得出棉花长势的指标性状,结果表明颜色分量与叶片的叶绿素含量相关性最强,其次为叶片钾含量、氮含量、磷含量[37]。基于图像获取植物病虫害信息的方法方便、无损,然而大都基于试验数据的统计分析,准确率有待提高。
2.2数字植物
数字植物是指通过计算机技术将植物数字化,在计算机上重构出看得见、可交互操作的虚拟植物模型,数字植物不仅在植物建模、计算机动画、数字娱乐、农业科普宣传等方面有广泛的应用,而且在农林业科研和植物生态研究等领域有重要的价值[38]。而基于图像的植物构造技术为植物及其生长环境的真实感重建提供了有效手段。
2.2.1植物建模基于计算机视觉的三维模型,获取的根本原理是通过分析物体的二维投影图像特征,得到目标对象的二维几何信息和拓扑信息,然后再根据特定算法获取对象三维信息,建立起三维立体模型。
(1)基于单幅图像。利用单幅图像中明暗、纹理、焦距等特征对被测物进行三维重建,获取植物姿态。Tan等通过简单交互,首先在图像中标记出树木枝干和树冠部分,然后根据预先设定好的模型自动生成叶片和枝干,完成整棵树的重建,该方法只需1幅图像和简单标记就能产生真实感较强的树模型,简单实用[39],效果如图7所示。Kim等通过数字图像消光法和基于骨架提取枝干,用1个树干构造各种树模型,并通过使用树枝的年龄信息结合比例因子模拟树木的生长过程,同时考虑了树的分叉顺序、树枝宽度、树的大小、树枝自我弯曲的影响等属性,实现对模拟树木生长过程的控制,基于真实图像的模拟表明,该系统可以轻松地实现现实树木的建模和生长过程[40]。这些方法通常受画面中被测物形状、反射以及曝光等情况的限制。Yan等根据树木的特殊结构,利用稳定的明暗特征恢复树木枝干三维形态,该方法有效克服了对表面、光源及拍摄条件的限制,提高了系统的鲁棒性[41]。这些方法只是依据植物分枝和叶片分布的基本原理进行视觉上的近似,不须要对图像进行匹配,降低了建模的难度,但是由于植物本身普遍存在卷曲、旋转等情况,该方法误差较大,无法对其精确重建[42]。
(2)基于多幅图像。该方法通过检测2幅或多幅未标定图像之间可用于匹配的特征点集,使用数值方法计算相机运动参数和被测物的几何参数,最终得到物体的三维模型[43]。Quan等利用SFM技术,从多幅图像中恢复出目标对象的三维点云信息,通过设置可变形的叶片模型,单独建立每张叶片,同时加以人工辅助构建枝干[44]。该方法可以再现目标对象的形状,生成逼真的植物模型,但是由于该方法需要人工干预,增加了操作的复杂性,此外该方法还需要从不同角度拍摄30~45张图片,而且拍摄时不能有光照和阴影的变化,只适用于室内或小型植物。Tan等对上述方法进一步改进,首先采用SFM技术恢复树木的三维点云,然后用这些点云重建可见枝干,用可见枝干的形状模型根据树枝结构的自相似性合成被遮挡的枝干,最后分割原图像并提取树叶重建整个树形[45]。然而这种方法需要几张从不同角度(大于120°)拍摄的图片,而且需要准确的图像配准,与此不同的是,Neubert等仅需要2张合适角度(最好为90°)拍摄的图像,该方法将利用图像方向场的约束,采用粒子流模拟生成枝干模型,最后在树干上添加枝叶,但是计算量较大[46]。以上几种方法都需要大角度范围的图片,Teng等提出1种树木建模系统,该方法能够从几幅观察范围非常窄(小于10°)的图像中重建树木的三维模型[47]。首先采用自标定技术估计相机参数,然后提取可见树干的骨架,通过Weber and Penn [48]约束,将叶片和树枝的生成作为最优化问题,生成接近真实树木的3D模型,克服了空间狭小的限制,结果如图8所示。此外,马伟等提出通过检测尖点特征重建植物模型的方法[49],该方法通过检测叶尖位置,指导叶片摆放,能够从多视点图像中重建带叶片植物模型,试验证明该方法可以方便地产生具有真实感的模型,人工干预少,但是当体模型上的叶尖不可见时方法失效。胡少军等提出1种基于稀疏图像的交互式建模方法,在自然环境下采集2幅相差90°的树图像及对应4~7幅中间图像,在图像上获取各级树枝二维投影位置及粗度信息,并通过中间图像找到各级树枝在另一幅图像上的匹配树枝,然后进行透视校正,生成树枝三维几何模型,最后根据叶序规则添加树叶完成重建[50]。结果表明,该方法对图像拍摄数量与角度要求不高,重建时能较好地保持树的拓扑结构,但是需要人工参与交互,耗时也比较长。
2.2.2植物動画合成视频是记录运动的主要载体,它们很容易获得并且记录过程不会对植物造成影响。根据视频生成植物动画,在很大程度上降低了动画的制作成本,而且这种方法能够提高动画生成的实时性,具有广阔的应用前景。Diener 等从视频序列中提取出真实灌木在风力影响下的运动并将其映射到三维植物模型的动画中,他们首先跟踪视频片段应用特征,聚合二维位置和速度特征,然后通过统计聚类方法得到的分层合成枝条的几何结构,同时提取特征组的分层形状和运动信息,试验结果表明,该方法极大地促进了对树叶背景的剔除,提高了特征跟踪的鲁棒性,产生了较好的动画效果[51]。董宇等从视频图像中提取出树木的形态和运动信息,通过最小二乘拟合方法计算出运动轨迹,并对其进行三维重建和运动模拟,生成无叶树木的动画[52]。但是该方法为了减少计算量,简化了树木的枝干,而且在绘制树木过程中,为了避免树叶对树枝的遮挡影响,只是考虑了无叶类树木的建模。唐卫东等从视频图像中提取植株的生长信息,通过枝条拼接以及相关控制参数重构植株生长过程,构建了植株虚拟生长动态模型[53]。宋成芳等提出1种基于视觉感知层次的动态几何简化算法,该方法针对植物及其运动天然具有层级性的特点,依据植物的树型层级结构,将运动作高低频分解,将所有低频运动合成即获得原始运动在此层次的逼近,可实现植物运动的高效简化和压缩,利于生成大规模植物场景的真实感动画面[54]。使用视频图像合成动画的方式避免了复杂的植株生长计算过程,对于视频图像简单、元素单一的情形能取得较好的仿真效果,但是该方法为了减少计算量,对植物的几何拓扑结构进行了简化,而且在多维目标下的图像处理有待进一步优化。
3存在问题及发展趋势
就目前技术而言,基于计算机视觉的作物行为感知技术实现起来难度较大,主要问题:(1)在图像获取过程中,户外条件下由于光照与阴影的存在,会对植物与背景的分割造成影响,现有的基于颜色空间转换或基于机器学习的方法能取得较好效果,但是需要人工参与,无法实现自动分割[55-56];(2)在图像匹配过程中,由于作物自身颜色、纹理、形状等信息高度相似,导致特征点匹配结果不稳定,另外由于局部欠纹理及遮挡问题,增加了特征点匹配难度,对植物特征提取和识别造成困难;(3)在植株形态信息提取过程中,由于需要获取三维信息,而从二维图像恢复观测对象三维信息的过程中,导致部分信息丢失,现有的一些方法能够取得接近真实的效果,但是只适用于某些特定情况[19,21]。
尽管存在以上诸多问题,研究者们进行了各种尝试,可在以下几个方面作出进一步的探索:(1)从数据获取手段角度,将多种不同数据融合,如结合多光谱相机,获取同一观测对象不同光谱下的图像信息,或获取不同光照条件下同一观测对象的图像,采用高动态图像融合算法,将图像融合,克服光照对图像的影响,降低图像分割的难度,另外也可以结合深度相机,以弥补二维图像信息丢失的问题[57-59];(2)从数据处理方法角度,一方面进一步完善图像建模方法,提高三维信息获取精度,另一方面在提高算法准确性的同时,可能会导致运算复杂性的提高,降低图像处理速度,因此可以考虑采用并行的处理方法,提高实时性,增加实用性;(3)由于作物整个生长周期本身各器官形态、颜色会发生巨大变化,现有的研究多针对作物的某一生长阶段进行监测,对作物生长状况作横向的对比,无法获取作物整个生长期的长势信息,而作物本身纵向的动态变化则更能表现出外界条件对其生长产生的影响,因此,对作物整个生长周期进行动态追踪,具有重要的研究意义,可以从这个方面进行深入的研究。
4结论
作物行为感知对进一步研究外界环境对作物产生的影响以及作物自身生长机制具有重要意义,广泛应用于长势信息获取、动画生成、生长模拟等领域。本研究对作物行为感知领域作了比较详细的论述,从基于计算机视觉的作物行为感知获取方法及应用2个方面回顾了该方向的发展现状和常用方法,并分析总结了目前存在的主要问题及可能的发展方向。植物行为理解研究依然处于初级阶段,还须要提出新的方法来解决当前所面临的问题。
参考文献:
[1]Morimoto T,Hashimoto Y. AI approaches to identification and control of total plant production systems[J]. Control Engineering Practice,2000,8(5):555-567.
[2]Fleisher D H,Kang S,Ting K C. Software for multiple crop production in advanced life support systems[C]. 2001 ASAE Annual Meeting. Minneapolis:American Society of Agricultural and Biological Engineers,1998.
[3]Seginer I,Elster R T,Goodrum J W,et al. Plant wilt detection by computer-vision tracking of leaf tips[J]. Trans of the ASAE,1992,35(5):1563-1567.
[4]Kim Y,Glenn D M,Park J,et al. Hyperspectral image analysis for water stress detection of apple trees[J]. Computers and Electronics in Agriculture,2011,77(2):155-160.
[5]Lee K J,Lee B W. Estimation of rice growth and nitrogen nutrition status using color digital camera image analysis[J]. European Journal of Agronomy,2013,48:57-65.
[6]Yu Z H,Cao Z G,Wu X. Automatic image-based detection technology for two critical growth stages of maize:Emergence and three-leaf stage[J]. Agricultural and Forest Meteorology,2013,174-175:65-84.
[7]Wouters N,de Ketelaere B,Deckers T,et al. Multispectral detection of floral buds for automated thinning of pear[J]. Computers and Electronics in Agriculture,2015,113(C):93-103.
[8]Han L,Won S L,Ku W. Identifying blueberry fruit of different growth stages using natural outdoorcolor images[J]. Computers and Electronics in Agriculture,2014,106:91-101.
[9]Yeh Y H F,Lai T C,Liu T Y,et al. An automated growth measurement system for leafy vegetables[J]. Biosystems Engineering,2014,117:43-50.
[10]Eren E A,Alexey A,Florentin W,et al. Modeling leaf growth of rosette plants using infrared stereo image sequences[J]. Computers and Electronics in Agriculture,2015,110:78-90.
[11]王永皎,莫國良,张引,等. 植物的三维建模研究进展[J]. 计算机应用研究,2005,22(11):1-3.
[12]Ran N L,Sagi F,Hanan E. Estimating plant growth parameters using an energy minimization-based stereovision model[J]. Computers and Electronics in Agriculture,2013,98:260-271.
[13]Cai X J,Sun Y,Zhao Y,et al. Smart detection of leaf wilting by 3D image processing and 2D fourier transform[J]. Computers and Electronics in Agriculture,2013,90:68-75.
[14]Mizuno S,Noda K,Ezaki N,et al. Detection of wilt by analyzing color and stereo vision data of plant[C]//International Conference on Computer Vision/Computer Graphics Collaboration Techniques and Applications. New York:Springer Berlin Heidelberg,2007:400-411.
[15]赵燕东,刘贺,刘卫平. 基于叶片分形维数的植物亏水胁迫萎蔫体态测量方法[J]. 农业工程学报,2011,27(9):191-195.
[16]Zhao Y D,Sun Y R,Cai X,et al. Identify plant drought stress by 3D-based image[J]. Journal of Integrative Agriculture,2012,11(7):1207-1211.
[17]Nielsen M,Slaughter D C,Gliever C. Vision-based 3D peach tree reconstruction for automated blossom thinning[J]. IEEE Transactions on Industrial Informatics,2012,8(1):188-196.
[18]陈兵旗,何醇,马彦平,等. 大田玉米长势的三维图像监测与建模[J]. 农业工程学报,2011,27(增刊1):366-372.
[19]王传宇,赵春江,郭新宇,等. 基于数码相机的农田景物三维重建[J]. 中国农学通报,2011,27(33):266-272.
[20]Casady W W,Singh N,Costello T A. Machine vision for measurement of rice canopy dimensions[J]. Transactions of the ASAE,1996,39(5):1891-1898.
[21]Jay S,Rabatel G,Hadoux X,et al. In-field crop row phenotyping from 3D modeling performed using structure from motion[J]. Computers and Electronics in Agriculture,2015,110:70-77.
[22]李长缨,滕光辉,赵春江,等. 利用计算机视觉技术实现对温室植物生长的无损监测[J]. 农业工程学报,2003,19(3):140-143.
[23]王加强,马明建,孟凡华,等. 基于计算机视觉的大空间无糖组培苗生长参数测量[J]. 农机化研究,2008,4(4):178-179.
[24]马彦平. 基于数字图像的冬小麦,夏玉米长势远程动态监测技术研究[D]. 华中农业大学,2010.
[25]He D X,Matsuura Y,Kozai T,et al. A binocular stereovision system for transplant growth variables analysis[J]. Applied Engineering in Agriculture,2003,19(5):611-617.
[26]马彦平,白由路,高祥照,等. 基于数字图像的玉米叶面积测量方法研究[J]. 中国农业通报,2009,25(2):329-334.
[27]龚爱平,吴武豪,裘正军,等. 基于Android系统手机的叶面积测量方法[J]. 农业机械学报,2013,44(9):203-208.
[28]王传宇,赵明,阎建河. 基于双目立体视觉的苗期玉米株形测量[J]. 农业机械学报,2009,40(5):144-148.
[29]赵春江,杨亮,郭新宇,等. 基于立体视觉的玉米植株三维骨架重建[J]. 农业机械学报,2010,41(4):157-162.
[30]Van Henten E J,Bontsema J. Non-destructive crop measurements by image processing for crop growth control[J]. Journal of Agricultural Engineering Research,1995,61(2):97-105.
[31]Kirk K,Andersen H J,Thomsen A G,et al. Estimation of leaf area index in cereal crops using red-green images[J]. Biosystems Engineering,2009,104(3):308-317.
[32]雷咏雯,王娟,郭金强,等. 一种基于图像分析提取作物冠层生物学参数的方法与验证[J]. 西北农业学报,2006,15(3):45-49.
[33]武聪玲,滕光辉,李长缨,等. 黄瓜幼苗生长信息的无损监测系统的应用与验证[J]. 农业工程学报,2005,21(4):109-212.
[34]王桂琴,郑丽敏,朱虹,等. 图像处理技术在冬小麦叶面积指数测定中的应用[J]. 麦类作物学报,2004,24(4):108-112.
[35]Zhao Y,He Y A,Xu X. A novel algorithm for damage recognition on pest-infested oilseed rape leaves[J]. Computers and Electronics in Agriculture,2012,89:41-50.
[36]Phadikar S,Sil J,Das A K. Rice diseases classification using feature selection and rule generation techniques[J]. Computers and Electronics in Agriculture,2013,90:76-85.
[37]李亞兵. 基于群体数字图像的棉花生长发育监测研究[D]. 北京:中国农业科学院,2007.
[38]赵春江,陆声链,郭新宇,等. 数字植物及其技术体系探讨[J]. 中国农业科学,2010,43(10):2023-2030.
[39]Tan P,Fang T,Xiao J X,et al. Single image tree modeling[J]. ACM Transactions on Graphics (TOG),2008,27(5):108.
[40]Kim J,Jeong I K. Single image-based 3D tree and growth models reconstruction[J]. Etrl Journal,2014,36(3):450-459.
[41]Yan T,Chen Y Y,Wu E H. Depth estimation and modeling of a tree from a single image[J]. Chinese J Comput,2000,23(4):386-392.
[42]赵春江,郭新宇,陆声链. 农林植物生长系统虚拟设计与仿真[M]. 北京:科学出版社,2010.
[43]张建,李宗南,张楠,等. 基于实测数据的作物三维信息获取与重建方法研究进展[J]. 华中农业大学学报,2013,32(4):126-134.
[44]Quan L,Tan P,Zeng G,et al. Image-based plant modeling[C]//ACM Transactions on Graphics (TOG). ACM,2006,25(3):599-604.
[45]Tan P,Zeng G,Wang J D,et al. Image-based tree modeling[C]//ACM Transactions on Graphics (TOG). ACM,2007,26(3):87.
[46]Neubert B,Franken T,Deussen O. Approximate image-based tree-modeling using particle flows[C]//ACM Transactions on Graphics (TOG). ACM,2007,26(3):88.
[47]Teng C H,Chen Y S. Image-based tree modeling from a few images with very narrow viewing range[J]. The Visual Computer,2009,25(4):297-307.
[48]Weber J,Penn J. Creation and rendering of realistic trees[C]//Proceedings of the 22nd Annual Conference on Computer Graphics and Interactive Techniques. Los Angeles:ACM,1995:119-128.
[49]马伟,项波,查红彬. 基于测量数据的植物建模[J]. 中国科学,2009,39(1):134-144.
[50]胡少军,耿楠,张志毅,等. 基于稀疏图像的真实树交互式建模方法[J]. 农业工程学报,2014,30(9):168-175.
[51]Diener J,Reveret L,Fiume E. Hierarchical retargetting of 2D motion fields to the animation of 3D plant models[C]//Proceedings of the 2006 ACM SIGGRAPH/Eurographics Symposium on Computer animation. Vienna Eurographics Association,2006:187-195.
[52]董宇,谢思超,董天阳. 基于视频的树木运动信息提取和动画生成技术研究[J]. 计算机时代,2008(11):1-3.
[53]唐卫东,胡雪华,郭晨,等. 基于视频特征提取的虚拟植物动态仿真研究[J]. 计算机应用研究,2011,28(1):1-3.
[54]宋成芳,杨颖振,彭群生. 植物运动的层次式简化技术[J]. 中国图像图形学报,2011,16(8):1526-1531.
[55]Meyer G E,Neto J C. Verification of color vegetation indices for automated crop imaging applications[J]. Computers and Electronics in Agriculture,2008,63(2):282-293.
[56]Guo W,Rage U K,Ninomiya S. Illumination invariant segmentation of vegetation for time series wheat images based on decision tree model[J]. Computers and Electronics in Agriculture,2013,96:58-66.
[57]劉鑫,许华荣,胡占义. 基于GPU和Kinect的快速物体重建[J]. 自动化学报,2012,38(8):1288-1297.
[58]王奎,安平,张艳,等. 基于Kinect的实时深度提取与多视绘制算法[J]. 光电子激光,2012,23(10):1949-1956.
[59]宫钰嵩,张岩,文艳,等. Kinect扫描数据驱动的几何建模方法[J]. 计算机辅助设计与图形学学报,2014,26(11):1957-1965.周俊明,何孔旺,倪艳秀,等. 次黄嘌呤核苷酸脱氢酶对猪链球菌2型ZY05719基因转录谱的影响[J]. 江苏农业科学,2017,45(6):27-29.
doi:10.15889/j.issn.1002-1302.2017.06.005
猜你喜欢
计算机应用(2016年12期)2017-01-13
中国新通信(2016年22期)2017-01-13
现代电子技术(2016年22期)2016-12-26
语文教学之友(2016年2期)2016-02-27