
一种新型不确定分数阶混沌系统滑模同步控制方式
2017-05-10 01:57:48孙美美胡云安韦建明
电子科技大学学报 2017年3期
孙美美,胡云安,韦建明
(海军航空工程学院控制工程系 山东 烟台 264001)
一种新型不确定分数阶混沌系统滑模同步控制方式
孙美美,胡云安,韦建明
(海军航空工程学院控制工程系 山东 烟台 264001)
针对一类存在参数摄动、未知函数及外部扰动等不确定因素的分数阶混沌系统的同步控制问题,设计了一类具有新颖的分数型积分滑模面的同步控制器。所设计的新型分数阶滑模面抖震更小、收敛速率更快。提出了一种改进的分数阶非增长型自适应律,有效避免了随时间增长可能引起的控制量无界的问题。引入频率分布模型分析系统模型,并基于Lyapunov稳定性定理证明同步误差收敛,避免了直接用伪状态变量对同步误差系统进行分析的错误,形成了分数阶运算和整数阶同步控制方法有机结合的新方法。仿真结果证明了该方法的有效性。
自适应控制; 混沌; 分数阶; 滑模控制; 同步
由于实际工程应用的需要以及研究的深入,实际问题常常面对复杂的工作环境和不确定因素,对系统精确的建模就变得尤为重要,分数阶微分模型为解决这一问题提供了新的思路,得到了越来越多的关注。相比于整数阶系统的控制发展,分数阶系统的控制和同步控制理论还很不完善,在某些方面甚至是空白,如对于线性定常的分数阶系统,目前还没有关于其稳定性的劳斯型判据,也很难找到合适的李雅普诺夫函数来进行系统分析和控制器设计。
目前,发展最为成熟的可用于指导控制器设计并进行稳定性分析的方法是针对线性定常同元次分数阶系统基于线性矩阵不等式(LMI)的分析与综合方法[1-2],学者们也尝试了其他的控制方法,如根轨迹法[3]、H∞控制[4]、自抗扰控制[5]及最优控制[6]等。滑模控制瞬态反应快、对不确定性具有鲁棒性等特点,在分数阶混沌系统的同步控制设计中也得到了一些应用[7-14]。文献[15]设计了一种分数阶滑模面,开拓了分数阶混沌系统的滑模控制的新道路。文献[16]设计了一种新型四维自治超混沌系统,并找到其分数阶状态,设计了整数阶滑模控制器实现了异结构同步。文献[17]将自适应控制和模糊控制相结合,解决了带有不确定、参数未知和外部扰动的分数阶混沌系统的异同步问题。文献[18]针对分数阶混沌系统存在未知参数和未知外界扰动的情况,提出了一种分数阶自适应更新律,通过Mittag-Leffler稳定性定理证明了同步误差系统收敛。
上述及现有文献大多一是直接利用系统变量并基于Lyapunov稳定性理论进行分析,但是由分数阶定义可知,分数阶系统具有对历史特性的记忆性和全局特性,状态变量实际是对之前状态积累的一个反映,且积累的影响随时间增长而减弱,直接对状态变量进行分析显然是不准确的;二是所设计的自适应律随时间增长而增大,可能引起控制量无界的问题。
稳定性作为系统的基本性能要求,是控制器设计中最重要的环节。关于分数阶系统的稳定性理论仍处于探索阶段,目前比较常用的有分数阶稳定性理论、Mittag-Leffler定理[19]、分数阶拓展稳定性理论[20]、基于K类函数的分数阶Lyapunov直接法[21]。文献[22]介绍了阶次小于1的分数阶系统的稳定性理论;文献[23]从另一角度证明了分数阶稳定性理论不仅适用于分数阶自治系统,也同样适用于分数阶非自治系统。文献[24-26]对几种常用的分数阶系统稳定性理论方法进行了总结分析,这些方法虽然比最原始的稳定性判据更方便,但在指导控制器设计方面还存在较大困难。
综上所述,分数阶系统与控制研究既具有重要的工程意义和较广的应用前景,又充满困难和挑战。因此本文选取了一类存在参数摄动、未知函数及外部扰动等不确定因素的分数阶混沌系统进行研究,在传统滑模控制中引入分数阶微积分算子,既保持了传统滑模控制的理论特性,又增加了新的应用特性;引入频率分布模型[27]对系统模型,直接分析系统真实状态变量,设计一种新型分数阶滑模同步控制器,旨在丰富分数阶混沌系统的同步控制研究。
1 预备知识
分数阶微积分实际上是指任意阶次的微积分,在其发展的历史中,学者们多次从不同角度对微积分进行了定义,下面简单介绍几种常用的定义。
定义 1 分数阶积分由Riemann-Liouville积分定义[28-29]。函数 f(t)的n阶积分(n为正实数)为:

定义 2 Riemann-Liouvill型分数阶导数定义为:

式中,n−1<α<n 。
Riemann-Liouvill型分数阶导数有超奇异性,20世纪60年代,意大利的Caputo提出了弱奇异的分数阶微分定义。
定义 3 Caputo分数阶导数定义为:

由定义可以看出,输入函数的初值以衰减的形式进行输出,零初值下分数阶微分是卷积分的形式。因此,分数阶微分实际上是一个积分,且随时间衰减记忆,这就是分数阶微分算子最大的特点。
本文采用工程应用较多的Caputo型定义,在处理具体问题时,可以选取不同类型的定义。为方便表达,用Dα代替aDtα。
2 系统描述
将分数阶混沌系统写为如下的形式:

由于式(4)所表示的系统既包括线性部分又包括非线性部分,具有非常广泛的代表性,能够包含大多数混沌系统,将现有文献中的分数阶混沌系统总结如表1所示。
将式(4)表示的系统作为驱动系统,则被控响应系统表达式为:

式中,y(t)∈Rn为响应系统的状态向量;ΔAy∈Rn×n未知参数矩阵;g(y, t)∈Rn为响应系统的非线性部分;Δg(y, t)∈Rn表示不确定非线性函数向量,ΔAy和Δg(y, t)分别表示系统中的线性和非线性的不确定性;u(t)∈Rn为需要设计的同步控制器。
定义同步误差e=y−x。控制目标是设计合适的控制器u(t),使得,实现驱动系统与响应系统的同步。
由式(4)和式(5)可得同步误差系统方程为:



式中,1ε和ε2为正常数。

表1 4种不同类型的分数阶混沌系统
3 滑模同步控制器设计
3.1 滑模面的选择
以简单的分数阶线性滑模面为例,简要说明分数阶滑模控制相比于传统整数阶滑模控制的优势。分数阶滑模面的表达式为:

当α=1时,式(8)为整数阶滑模面,收敛速度为e−kt;当α≠1时,式(8)为分数阶滑模面,收敛速度为t−α。图1为分数阶滑模的基本原理[31],由图可以看出,分数阶滑模运动相对于整数阶滑模运动产生的抖震较小,且能取得较高的控制精度。引理 1[1,22]考虑如下分数阶自治系统:
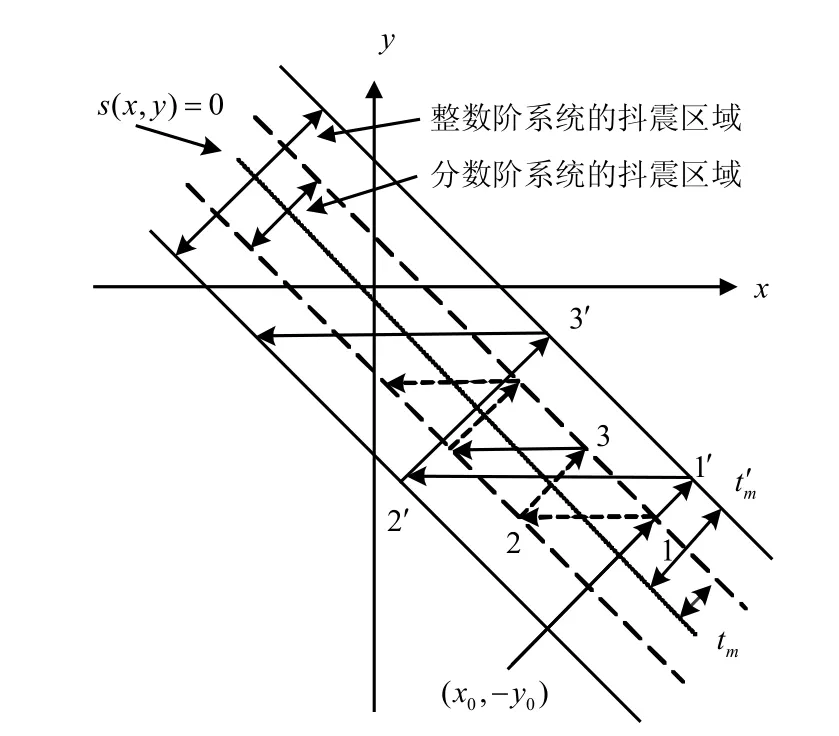
图1 整数阶滑模面与分数阶滑模面收敛特性对比图

式中,0<α<1,x(t)∈Rn为系统状态向量;AD∈Rn×n为系统参数矩阵。当时分数阶系统稳定;当时分数阶系统渐近稳定,此时,状态向量以t−α速度收敛至零。

图2 分数阶线性系统稳定性理论原理图
引理 2[30]分数阶系统Dαy(t)=υ(t), 0<α<1,y(t)∈R,υ(t)∈R可以被看作如下一个线性频率分布模型:

式中,权重函数μα(ω)=sin(απ)/πωα;系统状态z(ω,t)∈R。
定义滑模函数为:

对式两边关于时间求α阶次导,有:

为方便表达,记s(t)为s。当系统发生滑模运动时,须满足s=0和Dαs=0,那么有:

根据引理1,选择合适的矩阵C,保证分数阶同步误差系统稳定,且C将决定||e||1→0的速度。
根据引理2,可以得到滑模面的等价频率分布模型为:

式中,权重函数为μ(ω)=sin(απ)/πωα;z(ω,t)∈R为实际误差变量。选择Lyapunov函数为:

对其求导得:
3.2 滑模同步控制器的设计
设计控制器如下:



式中,q1, q2,γ1, γ2>0为调节参数。显然,

根据引理2,得到参数估计误差的频率分布模型为:

选择Lyapunov函数为:

对其求导得:
定理 1 考虑形如式(4)的分数阶混沌系统作为驱动系统,形如式(5)的分数阶混沌系统作为响应系统,选取分数阶滑模面如式(11)的形式,选择式(16)表示的控制律,选择式(18)和式(19)表示的分数阶自适应律,那么同步误差系统(6)渐近稳定,且收敛至零的邻域。
证明:选择全局Lyapunov函数为:


将μ(ω)代入,根据定积分中值定理可知存在ξ∈[0,∞ ),使得:

类似地,存在ζ∈[0,∞ ),使得:

式中,μ2, μ3>0,使得:为正常数。同理可知,存在常数
因此由不等式(26)可知:


因此,当时间趋向于无穷时,V(t)≤Q/ρ,系统同步误差及参数估计误差收敛到原点的邻域Ω={V≤Q/ρ}内,系统渐近收敛。
4 仿真分析
选取分数阶超Chen系统进行仿真验证,驱动系统为:

初始值选取为x (0)=(3,2,1,−1)T。驱动系统出现混沌吸引子,如图3所示。

图3 分数阶超Chen混沌吸引子(α=0.98)
被控响应系统模型为:

式中,函数不确定项和外部干扰项为:

自适应律增益选择为 q1=0.01,q2=0.01,响应系统阶次选为α=0.98,C=diag(2,2.15,3,1.6), K=diag(2,3,3,2)。仿真结果如图4所示。
从图中可以看到,驱动系统与响应系统的同步误差渐近收敛到零,意味着两个系统实现了同步。参数曲线如图5所示,从图中也可以看出,使用分数阶非单增型自适应律可以使估计误差渐近收敛,避免参数估计随时间无限增大的问题,及在时间足够长的情况下,可能引起的控制量无界问题。

图4 同步误差曲线

图5 参数估计曲线
5 结 束 语
本文对分数阶混沌系统滑模控制研究现状进行了简要介绍,分析了目前研究存在的不足和难点,研究了一类带有不确定性和外部扰动的分数阶系统的滑模同步问题,充分利用已知条件,将系统不确定性分为系统名义矩阵部分和不确定部分。设计了一类新型分数阶PI滑模面和非单增型自适应鲁棒同步控制律,与现有文献中的滑模控制设计相比,能够有效减小抖震并缩短收敛时间,避免了随时间增长可能引起的控制量无界的问题。最后,选择了频率分布表示的Lyapunov函数证明该控制律能够控制系统误差状态收敛到滑模面上,避免了大多文献中直接用伪状态变量对同步误差系统进行分析的错误。
[1] SABATIER J, MOZE M, FARGE C. LMI stability conditions for fractional order systems[J]. Computers & Mathematics with Applications, 2010, 59(5): 1594-1609.
[2] FARGES C, MOZE M, SABATIER J. Pseudo-state feedback stabilization of commensurate fractional order systems[J]. Automatica, 2010, 46(10): 1730-1734.
[3] MERRIKH-BAYAT F, AFSHAR M, KARIMIGHARTEMANI M. Extension of the root-locus method to a certain class of fractional-order systems[J]. ISA Transations, 2009, 48(1): 48-53.
[4] PADULA F, ALCANTARA S, VILANOVA R, et al. H∞control of fractional linear systems[J]. Automatica, 2013, 49(7): 2276-2280.
[5] LI M, LI D, WANG J, et al. Active disturbance rejection control for fractional-order system[J]. ISA Transactions, 2013, 52(3): 365-374.
[6] DJENNOUNE S, BETTAYEB M. Optimal synergetic control for fractional-order systems[J]. Automatic, 2013,49(7): 2243-2249.
[7] 吴学礼, 刘杰, 张建华, 等. 基于不确定性变时滞分数阶超混沌系统的滑模自适应鲁棒的同步控制[J]. 物理学报, 2014, 63(16): 160507.
WU Xue-li, LIU Jie, ZHANG Jian-hua, et al. Synchronizing a class of uncertain and variable time-delay fractional-order hyperchaotic systems by adaptive sliding robust mode control[J]. Acta Phys Sin, 2014, 63(16): 160507.
[8] GAO L. Modified sliding mode synchronization of typical three-dimensional fractional-order chaotic systems[J]. Neurocomputing, 2015, 166: 53-58.
[9] YANG C C. Synchronization of second-order chaotic systems via adaptive terminal sliding mode control with input nonlinearity[J]. Journal of the Franklin Institute, 2012, 349: 2019-2032.
[10] XIANG W, HUANGPU Y G. Second-order terminal sliding mode controller for a class of chaotic systems with unmatched uncertainties[J]. Communications in Nonlinear Science and Numerical Simulation, 2010, 15(11): 3241-3247.
[11] WANG C C, NS P, YAU H T. Chaos control in AFM system using sliding mode control by backstepping design[J]. Commun Nonlinear Sci Numer Simulat, 2010, 15(3): 741-751.
[12] HAERI M, EMADZADEH A A. Synchronization different chaotic systems using active sliding mode control[J]. Chaos Solitons & Fractal, 2007, 31(1): 119-129.
[13] 潘光, 魏静. 一种分数阶混沌系统同步的自适应滑模控制器设计[J]. 物理学报, 2015, 64(4): 040505.
PAN Guang, WEI Jing. Design of an adaptive sliding mode controller for synchronization of fractional order chaotic systems[J]. Acta Phys Sin, 2015, 64(4): 040505.
[14] 张洪, 陈天麒. 参数未知的时延混沌系统滑模变结构同步控制[J]. 电子与信息学报, 2005, 27(12): 1937-1941.
ZHANG Hong, CHEN Tian-qi. Synchronization of Time-delay chaotic systems with uncertainty based on sliding mode controller[J]. Journal of Electronics & Information Technology, 2005, 27(12): 1937-1941.
[15] MOHAMMAD P A. Robust stabilization and synchronization of a class of fractional-order chatic systems via a novel fractional sliding mode controller[J]. Commun Nonlinear Sci Numer Simulat, 2012(17): 2670-2681.
[16] YUAN G, LIANG C H, WU Q Q, et al. A new fractional-order hyperchaotic system and its modified projective synchronzation[J]. Chaos, Solitons & Fractals, 2015(76): 190-204.
[17] BOULKROUNE A, BOUZERIBA A, BOUDEN T. Fuzzy generalized projective synchronization of incommensurate fractional-order chaotic systems[J]. Neurocomputing, 2015(44): 791-801.
[18] WANG Q, DING D S, QI D L. Mittag-Leffler synchronization of fractional order uncertain chaotic systems[J]. Chinese Physics B, 2015, 24(6): 060508.
[19] LI Y, CHEN Y, PODLUBNY I. Mittag-Leffler stability of fractional order nonlinear dynamic systems[J]. Automatica, 2009, 45(8): 1965-1969.
[20] DELACARI H, BALEANU D, SADATI J. Stability analysis of Caputo fractional-order nonlinear systems revised[J]. Nonlinear Dynamics, 2012, 67(4): 2433-2439.
[21] NUSSBAUM R D. Some remarks on a conjecture in parameter adaptive control[J]. Systems & Control Letters, 1983, 3(5): 243-246.
[22] MATIGNON D. Stability results for fractional differential equations with applications to control processing[J]. Computational Engineering in Systems Applications, 1996(2): 963-968.
[23] 胡建兵, 赵灵冬. 分数阶系统稳定性理论与控制研究[J].物理学报, 2013, 62(24): 240504.
HU Jian-bing, ZHAO Ling-dong. Stability theorem and control of fractional systems[J]. Acta Phys Sin, 2013, 62(24): 240504.
[24] MACHADO J T, KIRYAKOVA V, MAINARDI F. Recent history of fractional calculus[J]. Communications in Nonlinear Science and Numerical Simulation, 2011, 16(3): 1140-1153.
[25] LI C P, ZHANG F R. A survey on the stability of fractional differential equations[J]. European Physical Journal, 2011, 193(1): 27-47.
[26] CHEN Y Q, PETRÁŠ I, XUE D. Fractional order control-tutorial[C]//Proceedings of the American Control. St, Louis, Mo, USA: [s.n.], 2009: 1397-1141.
[27] TRIGEASSOU J C, MAAMRI N, SABATIER OUTSTALOUP J A. A Lyapunov approach to the stability of fractional differential equations[J]. Signal Processing, 2011, 91: 437-445.
[28] OUSTALOUP A. La dérivation non-entière: Théorie, synthèse et applications[M]. Paris: Hermès Editeur, 1995.
[29] PODLUBNY I. Fractional differential equations: an introduction tractional derivatives, fractional differentials equations, to methods of their solution and some of their applications[M]. San Diego, Calif, USA: Academic Press, 1998.
[30] MONJE C A, CHEN Y, VINAGRE B M, et al. Fractional-order systems and controls[M]//Fundamentals and Applications. London, UK: Springer, 2010.
[31] ZHANG B T, PI Y G, LUO Y. Fractional order sliding-mode control based on parameters auto-tuning for velocity control of permanent magnet synchronous motor[J]. ISA Transactions, 2012, 51(5): 649-656.
编 辑 漆 蓉
A Novel Sliding Mode Synchronization Method of Uncertain Fractional-Order Chaotic Systems
SUN Mei-mei, HU Yun-an, and WEI Jian-ming
(Department of Control Engineering, Naval Astronautical and Aeronautical University Yantai Shangdong 264001)
A novel adaptive sliding mode synchronization controller for uncertain fractional order chaotic systems is proposed in this paper. The proposed controller can realize the synchronization of systems with parameters perturbation, function uncertainties, and exterior disturbance. The new sliding mode surface with fractional order has advantages of week chattering and high convergent rate. A novel fractional order adaptive updating law is proposed to prevent the estimations from increasing infinitely. The sliding mode surface and the parameter estimation error of the controller are modelled by utilizing frequency distribution model, and the convergence of the error system is verified by Lyapunov functions, avoiding the mistake caused by directly applying pseudo state variables for the analysis of system synchronization error. Simulation results demonstrate the effectiveness of the proposed scheme.
adaptive control; chaos; fractional-order; sliding mode control; synchronization
TP273
A
10.3969/j.issn.1001-0548.2017.03.013
2015 − 12 − 21;
2016 − 03 − 15
国家自然科学基金重点项目(61433011)
孙美美(1987 − ),女,博士,主要从事混沌控制与同步方面的研究.
猜你喜欢
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
制造技术与机床(2017年2期)2017-05-04 04:17:24
山东青年(2016年1期)2016-02-28 14:25:25
舰船科学技术(2015年8期)2015-02-27 15:38:46
航天返回与遥感(2014年5期)2014-07-31 17:57:09
华东理工大学学报(自然科学版)(2014年6期)2014-02-27 13:49:43
当代修辞学(2014年3期)2014-01-21 02:30:44
郑州大学学报(理学版)(2013年2期)2013-03-11 20:30:26
