
旋转导向随钻测井在长庆油田致密油水平井实验区的应用
2017-05-08 03:14王忠良龙斌李金刚丁凡刘继红陈碧婷
测井技术 2017年1期
王忠良,龙斌,李金刚,丁凡,刘继红,陈碧婷
(中国石油集团测井有限公司长庆事业部,陕西 西安 710200)
0 引 言
致密油是指夹在或紧邻优质生油层系的致密储层中,未经过大规模长距离运移而生成的石油聚集。随着长庆油田近年来已进入稳产阶段,致密油作为近期最现实的非常规油气资源,具有很大的开发勘探潜力。但与以往开发的特低渗透率、超低渗透率油藏相比,其成藏机理更复杂、孔喉更细微、填隙物含量更高、勘探难度更大。因此,随钻测井在指导在致密油层中安全、高效地钻进显得尤为重要。传统随钻测井采用滑动导向系统在钻长水平段水平井时,由于上部钻柱不旋转,会引起摩阻和扭矩过大、方位漂移失控、井眼轨迹不平滑等问题。计算和实践证明,水平井的水平段极限延伸能力受到了限制。
本文以长庆油田致密油开发实验区宁平×井应用旋转导向随钻测井技术为例,根据随钻方位伽马成像测井资料和实时地质模型,在录井数据失真的情况下,实时调整钻进方向,精确控制井眼轨迹,实现精准入窗,指导完成1 800 m水平段钻进。
1 旋转导向随钻测量系统
AUTOTRAK系统是一套集钻进和随钻测量为一体的随钻测井系统。该设备可实现旋转钻进中改变井眼轨迹和全系列测井。系统含有多种自动化旋转钻进模式、三参数全系列随钻测井仪器、实时成像、近钻头测量、上下传输闭环通讯系统、大功率井下发电机、高速脉冲器等多项先进技术。
(1) 系统组成。AUTOTRAK系统主要由旋转导向头短节、ONTRAK测量短节和BCPM通讯供电短节2部分组成。
(2) 测量参数。该设备测量参数齐全,不仅有工程数据、地面数据、钻井安全指标数据,还有方位伽马成像、电磁波电阻率(相位差电阻率和幅度衰减电阻率)等测井数据。
(3) 特点及优势。旋转导向随钻测井系统打破了传统随钻测井系统的单向通讯模式,实现了可在地面实时发送指令,保证了地面与井下工具的有效通讯。该系统也可实时测量近钻头井斜、旋转方位,实时计算井底轨迹,并含有多种智能化钻进模式,大幅提高控制轨迹的精准性。由于全井段旋转钻进,减小钻具磨阻扭矩,降低施工风险,平滑井眼,最大限度延长水平位移。
2 旋转导向原理
AUTOTRAK系统能够在旋转钻井过程中进行定向造斜钻进,主要是因为它有一个非常独特的非旋转可调扶正器套筒。该扶正器套筒并非真的不旋转,只是相对钻头驱动轴而言做缓慢的随机转动(每小时低于15转),因此在旋转钻进过程中,该扶正器套筒可以保持相对静止的状态,从而保证钻头沿着某一特定的方向钻进。非旋转扶正器套筒内有近钻头井斜传感器、液压油缸和活塞、电子控制元件。3个独立的液压油缸可推动活塞分别对3个安装在套筒上的扶正器肋板提供大至3 t的推动力,其合力使钻具沿某一特定方向偏移,从而在钻进过程中使钻头产生一个侧向力,保证钻头沿这一方向钻进,钻出高质量井眼(见图1)。
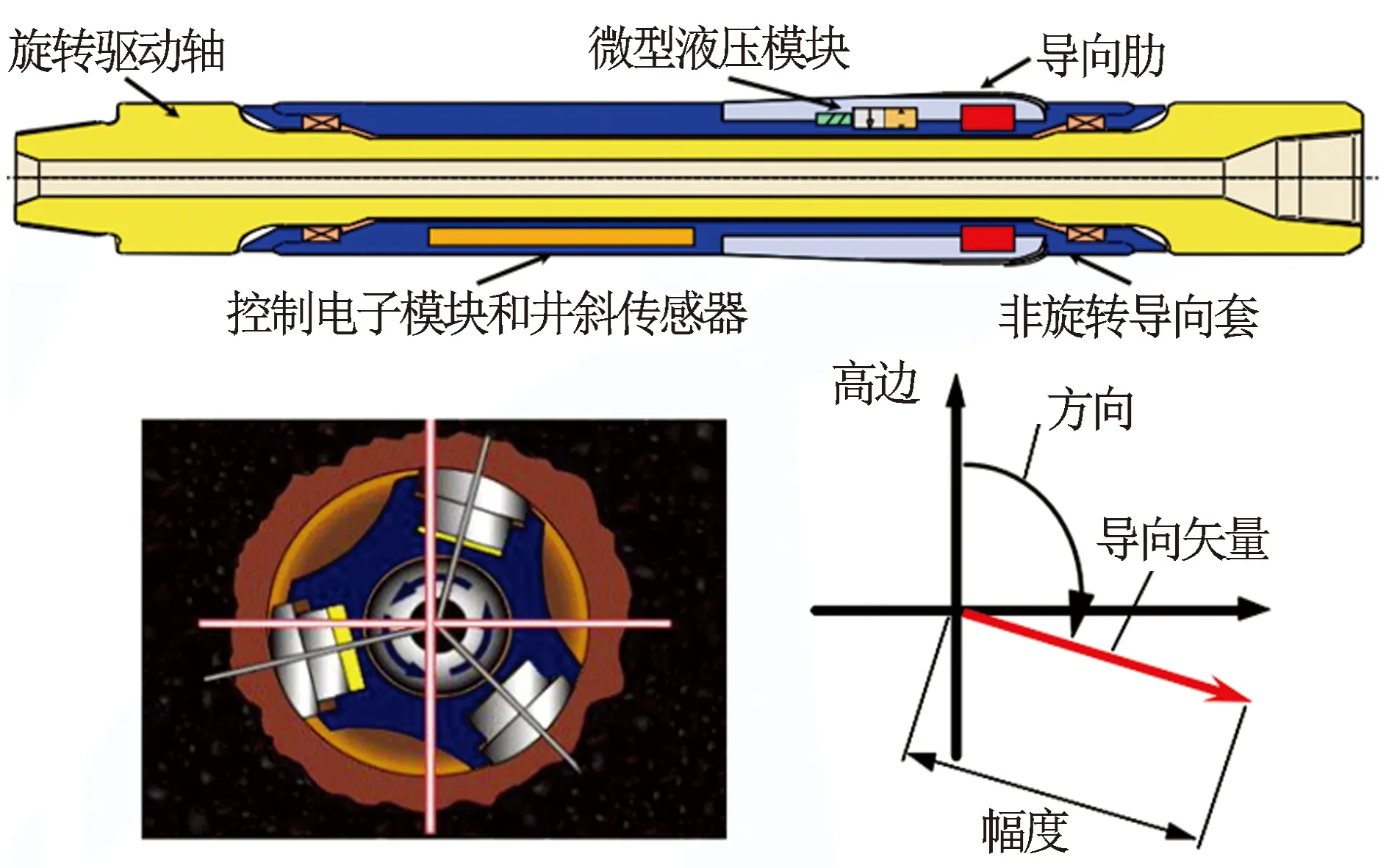
图1 旋转导向工作原理图
3 地质导向技术
地质导向技术是在常规定向井、水平井钻井基础上发展而来的一种综合性很强的技术[1-3]。水平井较常规生产井相比,其优势在于能够有效增加油气层的泄漏面积,提高单井产量,并且可以解决高稠油、超稠油的开发以及致密地层、低渗透层采油产量低的问题。
宁平×井位于长庆油田陇东地区致密油示范区块宁89井区,陇东地区处于伊陕斜坡西南部,西部为天环坳陷,整体表现为东高西低的面貌。该井所在的宁89井区构造比较简单,受盆地南缘构造的影响,整体呈向西北倾斜的平缓单斜构造,坡度较缓,地层倾角为0.6°,局部发育排状低幅鼻状构造,鼻轴长50~60 km,宽5~6 km。陇东地区长7沉积受重力流控制,重力流砂体厚度大,砂岩的侧向尖灭及岩性致密遮挡形成有效圈闭。油藏分布主要受岩性、物性控制,原始驱动类型为弹性溶解气驱,为典型岩性油藏。目的层位为长71,宁平井区长71平均孔隙度9.7%,平均渗透率0.10 mD*非法定计量单位,1 mD=9.87×10-4 μm2,下同,为典型的致密储层。该区最大主应力方位为北东78°宁平×井水平段设计方位为垂直于最大主应力方位,即北东348°。
该井控制井数量较少,缺少取心资料,且油层最小厚度约为2 m左右,给宁平×井的地质导向工作带来了极大难度。
3.1 垂深对比,精确入层
搜集邻井资料及区域构造资料,充分分析该区块标志层的特征,制作多井垂深对比图,通过施工井与邻井标志层海拔的对比,预测目的油层的顶界的海拔[4]。
为减小误差,宁平×井选取3口邻井作为对比井。将施工井的垂深曲线与邻井电测曲线形态相对比,然后优选出可靠的标志层,并以水平井及邻井所选出的标志层顶(底)界面到各自目的层顶(底)界面厚度相等为主要原则。为保证更准确地掌握地层沉降情况,在斜井段选择了多处标志层,如延9顶部煤层、长3砂岩标志层、长6顶部砂岩标志层、长7油页岩层等。预测过程中通常主要参考距离目的层最近的标志层,距离目的层越近,产生的误差越小。在长庆油田陇东区块长7顶部稳定发育油页岩,具有高自然伽马、高声波、高电阻率的显著标志,且该标志层距离目的油层长71距离最近,对施工井油顶海拔的预测有重要意义。在垂深1 690 m处,井深至长7段顶部油页岩,对比出现微微下沉,预计好油层油顶海拔-190 m左右。
3.2 水平段地质导向
对于水平段地质导向,LWD仪器离钻头越近越好,有成像探边功能也会大大提高地质导向的效果。对于AUTOTRAK而言,具有可实时测量近钻头井斜、旋转方位的功能,能帮助工程人员精准掌握工具在地层中的位置,有助于对轨迹的控制。
宁平×井因区域地层原因所测电阻率值响应不明显,因此主要依靠实时方位伽马成像技术进行地质导向。实时方位伽马成像可以判断实钻轨迹从目的油层的上部或下部钻出地层,提供实钻轨迹与地层之间的关系,也可以提取地层倾角,据此提前确认地层开始变化的位置,进而实时修正地质模型、调整轨迹,降低构造不确定性对地质导向结果的影响。
3.2.1 方位伽马成像技术
岩性识别是地质导向的关键技术。ONTRAK测量短节中装有2个角度呈180°的伽马探测器,确定测斜传感器工具面与方位伽马探测器正方向的旋转角,使随钻伽马具有方位特性。在实时旋转钻进过程中可提供上、下、左、右4条自然伽马曲线,生成4个扇区的伽马成像图。成像图中上边和下边表示井筒的高边,即上伽马探测值;中间表示井筒的低边,即下伽马探测值。颜色深表示伽马值大,颜色浅表示伽马值小。图2是宁平×井的一个应用实例,图2中高边颜色先变深,表示实钻轨迹是从井筒的高边进入上覆高伽马泥岩,因此轨迹应向下调整,保证轨迹在低伽马的砂岩中穿行。
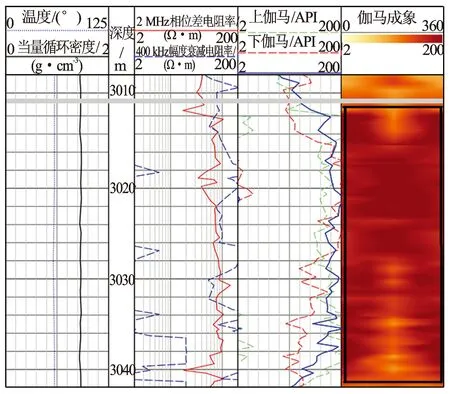
图2 水平段方位伽马成像图
3.2.2 实时修正地质模型
地质模型修正主要是根据方位伽马成像图计算视地层倾角。传统的自然伽马测井没有方位信息,虽然能根据控制井算视地层倾角,但利用伽马成像技术,在任何情况下尤其是在控制井数量少时,只要轨迹穿过一个层面,就可以获取穿越点处该层面的视地层倾角信息。根据实时计算得到的视地层倾角实时更新地质模型,相对更准确、客观的得到轨迹与地层的位置关系[5],从而为井眼轨迹调整赢得时间,真正实现地质导向实时决策。
计算视地层倾角的方法:以旋转导向工具从目的油层下层面穿出为例,下伽马探测器先测到高自然伽马值地层,因此方位伽马成像图上反映中间先呈现深色,上下再呈现深色,根据成像图中颜色变化点之间的实际测量深度差和井斜角,运用式(1)即可计算出视地层倾角[6]
α=arctan(L/DM)+β-90°
(1)
式中,α为视地层倾角;β为井斜角;L为井径;DM为成像图中颜色变化点之间的实际测量深度差。
上述方法是利用实时上传的上、下、左、右4条伽马曲线现场快速成像,进而计算地层倾角,精度相对不是很高,但足可满足地质导向工作需要。另外一种方法是利用仪器出井后的内存数据,经过一系列预处理之后拾取,精度较高,可用于构造研究。
在现场实钻过程中,对地层突变处应实时计算地层倾角,及时校正地质模型,尽量保证实钻轨迹在目的油层的上端穿行。
3.3 复杂情况下为钻井提供准确数据
(1) 井漏时,依据随钻数据准确入靶。宁平×井出现严重井漏、井涌现象,在长时间压井堵漏、气测录井数据失真的情况下,依据旋导向随钻数据及相关模型准确入靶。
(2) 当量循环密度识别钻井风险。AUTOTRAK G4工具可提供循环当量密度数据,实时监控井下状态,降低了钻井风险。若循环当量密度(ECD)值突然下降,说明泥浆液柱下降,井漏可能性极大。
(3) 计算压井所需泥浆比重。利用井底环空压力减去环空压耗,再根据公式p=ρgh可计算压井所需泥浆比重。井底环空压力升高至3 600 psi**非法定计量单位,1 psi=6 894.76 Pa,下同,减去环空压耗,计算压井所需泥浆比重为1.46 g/cm3。
4 应用效果
4.1 提高油层钻遇率,优化井眼轨迹
钻进过程中,测井技术人员应用随钻成像测井资料和实时地质模型,在录井数据失真的情况下,实时调整钻进方向,精确控制井眼轨迹,实现精准入窗,指导完成1 800 m水平段钻进。在薄层、倾角多变的复杂储层中,砂体钻遇率达94.29%,油层钻遇率92.70%,声波时差变化范围220~250 μs/m,电阻率40~70 Ω·m,油层物性好,含油饱和度高,明显好于该井区其他3口井,且井身质量好,井眼轨迹光滑(见图3)。
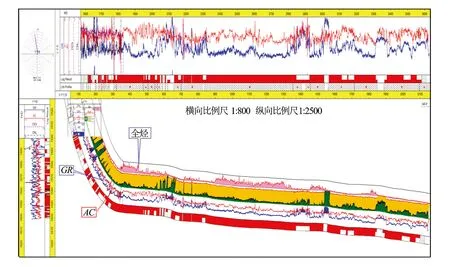
图3 井眼与轨迹关系及解释成果图
4.2 大幅降低钻具磨阻扭矩
由于旋转导向系统采用全井段旋转送进钻杆,保证了钻压的正常传递,减少了井下钻具改变井斜、扭方位过程中的托压问题,可以有效保证钻压正常施加在钻头上。施工过程中,钻具的磨阻扭矩比常规滑动钻进时小得多,降低了井下事故发生的概率。
4.3 有效提高机械钻速,缩短周期
结合施工钻井队缺少顶驱无法提供持续高转速的情况,为了提高机械钻速,随钻测井技术人员决定从二开接井到完钻一直使用旋转导向系统自带的X-treme模块马达。该马达具有双向通讯的功能,可将地表较低转速转化为较高转速提供给钻头,并具有强大的功率和扭矩输出,比常规泥浆马达高60%,效率更高。
经过精细数据统计,该井自二开至入靶平均机械钻速为15.27 m/h,高于邻井的12.04 m/h;同为1 835 m水平段,该井平均机械钻速为17.19 m/h,高于邻井的16.12 m/h,与邻井相比缩短周期1.33 d(见表1)。应用旋转导向 X-treme 模块马达技术可达到提高机械钻速、缩短钻井周期。

表1 钻进周期统计表
5 结论与认识
(1) 该系统不仅能提供地面参数、工程参数而且能提供钻井安全数据和各种测井数据、成像数据,为安全施工提供了保障同时也可取消电缆测井,缩短钻井周期。
(2) 旋转导向随钻系统较传统滑动导向随钻系统而言,能更精细地控制井眼轨迹,更好指导实钻轨迹在目的层中稳定穿行,提高储层钻遇率。
(3) 该系统在长庆油田厚度较薄的致密油层中优势明显。
参考文献:
[1] 荣海波,贺昌华. 国内外地质导向钻井技术现状及发展 [J]. 钻采工艺,2006,29(2): 7-9.
[2] 林广辉. 地质导向系统的研究与应用 [J]. 中国海上油气(工程),2000,12(5): 39-47.
[3] 杨锦舟. 基于随钻自然伽马、电阻率的随钻导向系统及应用 [J]. 测井技术,2005,29(4): 285-288.
[4] 裴素安. 地质导向在冀州油田的应用 [J]. 天然气勘探与开发,2006,29(4): 57-59.
[5] 窦松江,赵平起. 水平井随钻地质导向方法的研究与应用 [J]. 海洋石油,2009,29(4): 77-82.
[6] EFNIK,et al. Using New Advances in LWD Technology for Geosteering and Geologic Modeling [C]∥SPE 57537,1999.
猜你喜欢
石油管材与仪器(2021年1期)2021-04-13
石油钻探技术(2020年4期)2020-10-09
石油化工应用(2020年2期)2020-03-18
石油钻探技术(2020年1期)2020-02-21
数学学习与研究(2019年12期)2019-08-07
西南石油大学学报(自然科学版)(2018年5期)2018-11-06
家庭影院技术(2018年8期)2018-08-21
中学生英语·阅读与写作(2017年1期)2017-02-10
天然气勘探与开发(2015年3期)2015-12-08
西南石油大学学报(自然科学版)(2015年4期)2015-08-20
