直流电机神经元PID调速系统设计与仿真
2017-05-08 14:40周晓华蓝会立�┱乓�李振强
计算技术与自动化 2017年1期
关键词:直流电机
周晓华 蓝会立�┱乓� 李振强
摘要:针对传统PI双闭环直流电机调速系统存在响应速度慢、超调量大、抗干扰能力及自适应能力差等问题,提出了一种双闭环直流电机调速系统的神经元PID转速调节器设计方法。该转速调节器采用神经元控制器和比例控制相结合进行设计,从而构成了一种具有自学习、自适应能力的神经元PID控制器,然后与传统单神经元PID设计的转速调节器控制效果进行了对比。结果表明,基于神经元PID转速调节器的双闭环直流电机调速系统具有较快的响应速度、良好的动态和静态稳定性、较强的自适应能力和抗干扰能力。
关键词:直流电机;转速调节器;神经元控制;比例控制;神经元PID
中图分类号:TM331文献标识码:ADOI:10.3969/j.issn.10036199.2017.01.005
1引言
双闭环直流调速系统由于起动转矩大、调速范围广、调速精度高、动态性能好和易于控制,因而在冶金、建材、印刷、轧钢机、电动汽车、电力机车及矿山等工业控制领域得到了广泛的应用[1-3]。传统双闭环直流调速系统广泛采用PI控制器设计其转速调节器,虽然PI转速调节器具有结构简单、稳定性好以及可靠性高等优点,但也存在超调量大、负载自适应能力差、抗干扰能力不强及鲁棒性差等缺点[4-5]。
神经元控制器结构简单,具有较强的自适应、自学习能力,且对控制对象模型精度要求不高,可通过在线调整自身权值进行自学习来适应控制对象的变化。本文将神经元控制器与比例控制相结合设计了一种神经元PID控制器,然后用其设计了双闭环直流调速系统的转速调节器,在Matlab/Simulink仿真平台建立了基于神经元PID的双闭环直流调速系统仿真模型,并与采用常规单神经元PID控制器设计转速调节器的双闭环直流调速系统的控制效果进行了仿真对比。结果表明,基于神经元PID转速调节器的双闭环直流调速系统的调速性能优于基于常规单神经元PID转速调节器的双闭环直流调速系统。
2直流电机调速系统结构
直流电机转速给定值ωref与检测的实际转速ω相比较后的转速偏差由转速调节器调节后,输出电流调节器的参考电流Iref,参考电流和检测的实际电流Ia的误差信号再由电流调节器进行调节,产生直流斩波器的触发脉冲信号,直流斩波器输出直流電压以驱动直流电机运行。直流电机调速系统转速调节器采用由比例控制和神经元控制器构成的神经元PID控制进行设计,电流调节器为滞环电流控制,直流斩波器模块由开关器件IGBT、续流二极管和电感元件构成。
3神经元PID转速调节器设计
双闭环直流电机调速系统转速调节器结构如图1虚线框内部分所示。转速调节器为由比例控制和神经元控制器构成的神经元PID控制器,为与常规单神经元PID控制器相区别,文中将其称为神经元PID控制器。
直流电机转速误差e(k)经状态转换后可形成神经元控制器[6]在k时刻的输入状态x
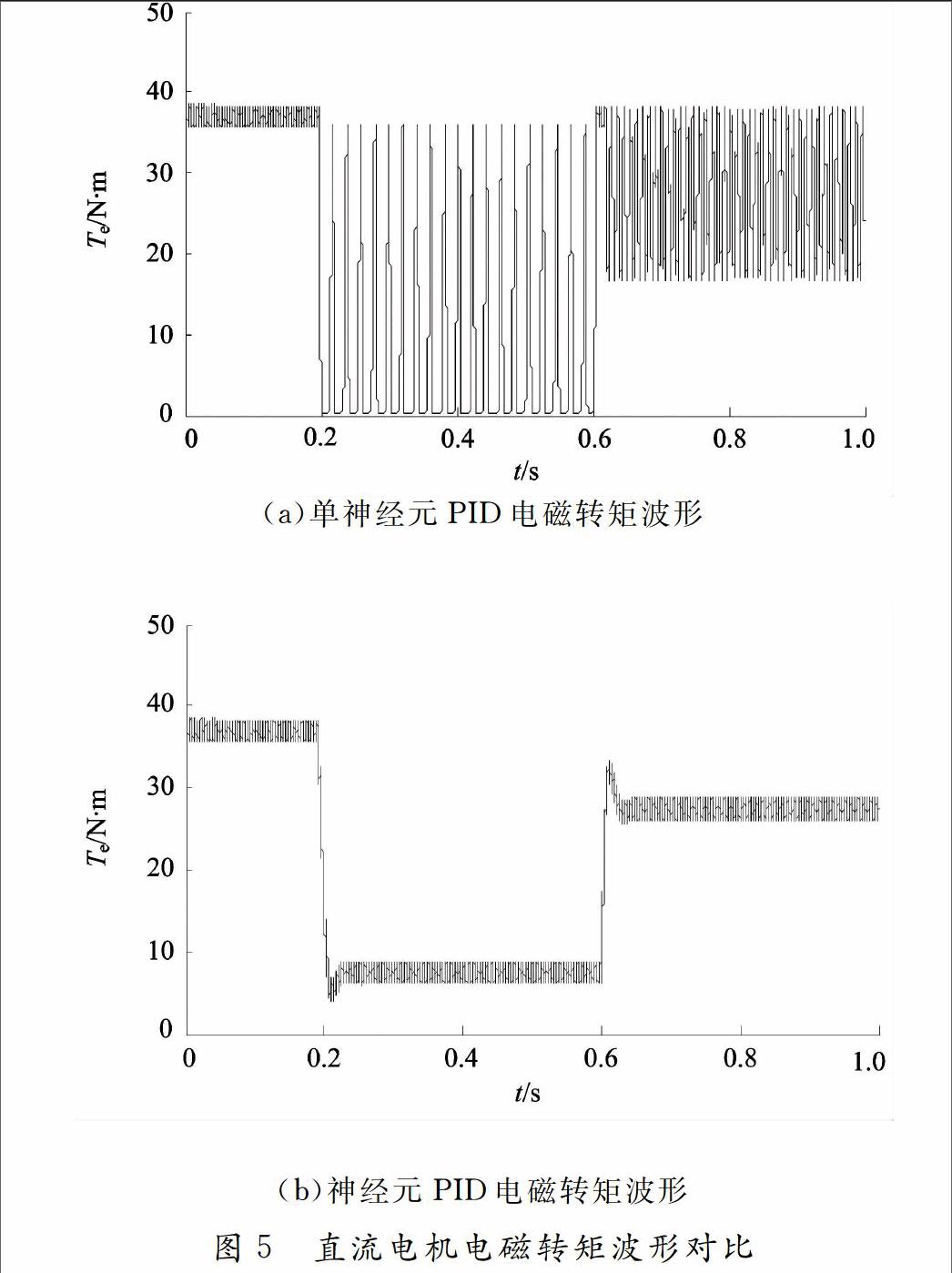
由图5可知,两种转速调节器调节下的直流电机起动转矩大小基本一致,但在稳态和负载转矩突增时,单神经元PID控制下的电磁转矩波动较大,稳定性较差。
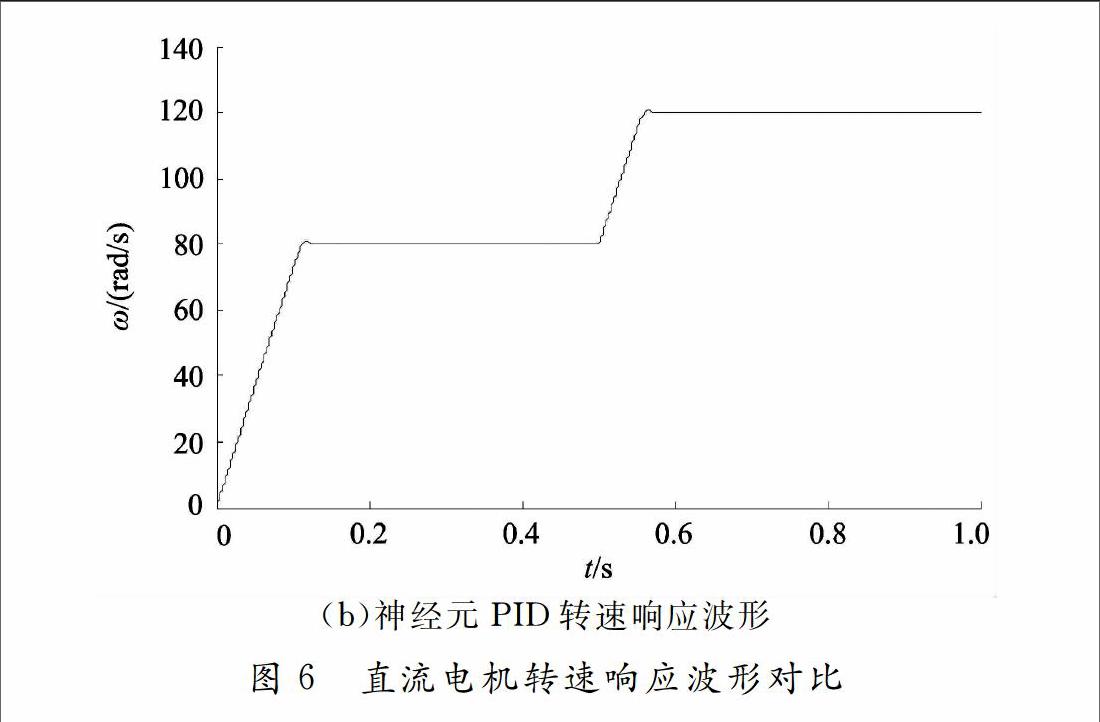
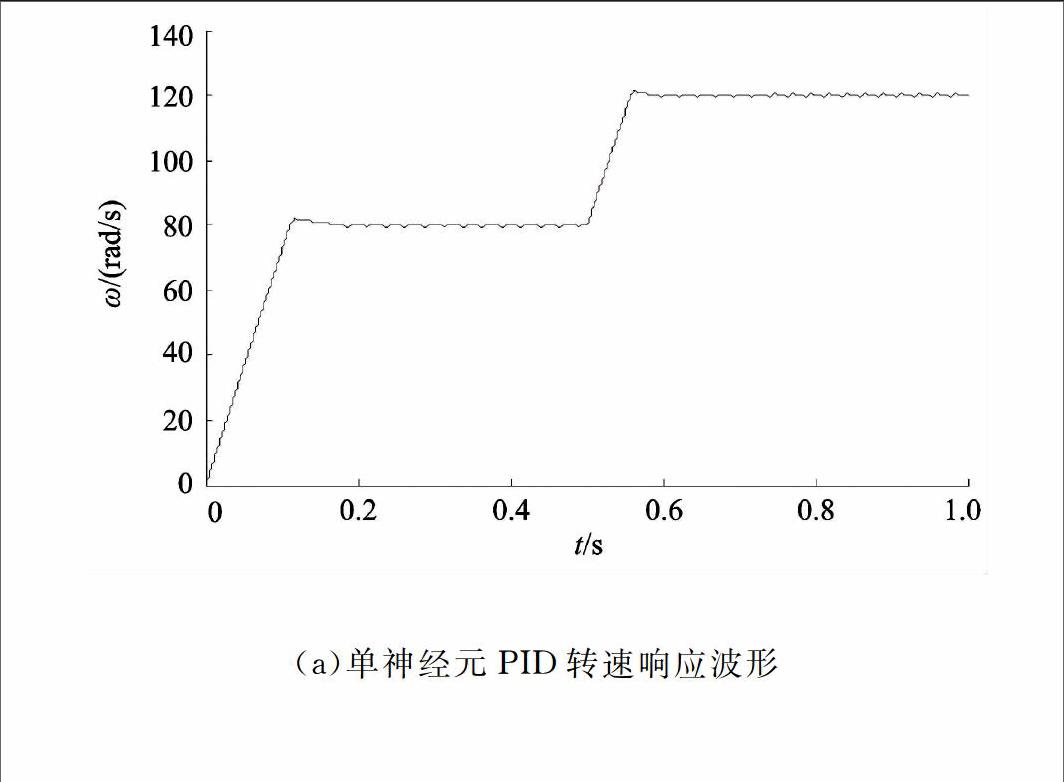
仿真情形2:设定直流电机负载转矩为5 N·m不变,参考转速ωref在0.5 s时由最初的80 rad/s上升到120 rad/s,两种转速调节器调节下的直流电机转速响应波形对比如图6所示。由图6可知,直流电机在负载转矩5 N·m下起动时,两种控制器调节下的转速响应速度都较快,在0.5 s参考转速由80 rad/s上升到120 rad/s时,神经元PID控制下的转速响应波形超调量较小,控制器的动态和静态稳定性表现更好。
6结论
本文采用神经元PID控制和单神经元PID控制分别设计了双闭环直流电机调速系统的转速调节器,并进行了负载转矩突变和参考转速变化的对比仿真。仿真结果表明,基于神经元PID转速调节器的双闭环直流电机调速系统响应速度快,动态和静态调节效果优越,控制器具有较强的抗干扰能力和自适应能力,控制器结构和算法简单易实现,在工程实际中具有较好的应用前景。
参考文献
[1]缪仲翠,党建武,张鑫,等. PSO优化分数阶PIλ控制的双闭环直流调速控制[J].计算机工程与应用,2015,51(7):252-257.
[2]沈凤龙.基于MATLAB/SIMULIK的双闭环直流调速系统仿真[J].辽东学院学报,2010,17(1):41-44.
[3]刘洋,范立南.基于MATLAB的直流调速系统仿真研究[J].沈阳大学学报,2010,22(5):11-14.
[4]赵正黎,于惠钧,张发明,等.基于模糊PID控制的直流电机调速系统[J].湖南工业大学学报,2015,29(2):38-43.
[5]文小玲,陈兵.直流调速系统单神经元自适应速度控制方法[J].武汉化工学院学报,2004,26(3):57-60.
[6]严家玉,王宁.适用于非线性对象的神经元变结构PID控制[J].江南大学学报:自然科学版,2008,7(2):132-136.
[7]刘金琨.先进PID控制MATLAB仿真(第3版)[M].北京:电子工业出版社,2011.
[8]周晓华,刘胜永,王荔芳,等.基于单神经元PID的直流脉宽调速系统研究[J].工矿自动化, 2013,39(11):85-88.
[9]MAHER M F,ALGREER YHYA RM K.Design Fuzzy Self Tuning of PID Controller for ChopperFed DC Motor Drive[J].AlRafidain Engineering,2008,16(2):54-66.
[10]洪乃刚.电力电子、电机控制系统的建模和仿真[M].北京:机械工业出版社,2010.
第36卷第1期2017年3月计算技术与自动化Computing Technology and AutomationVol36,No1Mar. 2 0 1 7第36卷第1期2017年3月计算技术与自动化Computing Technology and AutomationVol36,No1Mar. 2 0 1 7
猜你喜欢
科学与财富(2019年11期)2019-08-06
电机与控制学报(2018年9期)2018-05-14
科学与财富(2016年27期)2017-03-24
物联网技术(2016年12期)2017-01-21
中国新通信(2016年22期)2017-01-13
科技视界(2016年4期)2016-02-22
哈尔滨理工大学学报(2015年2期)2015-07-22
电子技术与软件工程(2015年6期)2015-04-20
计算技术与自动化(2014年1期)2014-12-12