基于MAP的汽车电控制动系统变工况控制研究*
2017-05-08 04:46王莹王博郭睿管欣徐亮
汽车技术 2017年3期
王莹 王博 郭睿 管欣 徐亮
(吉林大学,汽车仿真与控制国家重点实验室,长春 130025)
基于MAP的汽车电控制动系统变工况控制研究*
王莹 王博 郭睿 管欣 徐亮
(吉林大学,汽车仿真与控制国家重点实验室,长春 130025)
为提高汽车电控制动系统(ECBS)在变工况条件下的实时控制精度,提出了基于MAP图的ECBS控制参数自寻优方法。首先建立基于部件特性的液压制动系统模型和ECBS控制器,在不同的车速下进行制动阶跃试验,应用模拟退火粒子群算法(SAPSO)自寻各工况下最优的PID控制参数,形成MAP图,车辆可根据实际车速和制动踏板力在线查MAP图获得控制参数。仿真和实车试验结果表明,基于MAP图的ECBS系统可有效缩短制动距离并改善制动时的方向稳定性。
1 前言
目前,汽车电子控制制动系统(Electronic Control Braking System,ECBS)已广泛应用,主要包括汽车防抱死制动系统(Anti-lock Braking System,ABS)、电子感应控制制动(Sensotronic Brake Control,SBC)系统、电子制动力分配(Electric Brakeforce Distribution,EBD)系统等。大量文献和实践表明,ECBS可大幅增强车辆的制动性能[1~3],ECBS控制算法研究也一直是汽车主动安全控制领域的热点[4~6]。
以ABS为例,常用的控制方法有逻辑门限值控制[7~8]、基于滑移率的反馈控制[9~11]。基于逻辑门限值的控制策略不需要建立具体的数学模型,并且对系统的非线性控制很有效[7],但其参数的选取要依赖经验和大量的实车试验,并且很难将滑移率时刻控制在路面最佳滑移率附近,波动较大,控制精度不高[9]。
因此,目前国内外很多学者主要研究基于滑移率的控制策略[11~13]。PID控制是最常用的控制方法,但常规的固定PID控制参数的灵敏度高,易造成系统不稳定,在不同工况下缺乏适应性,很难将滑移率时刻控制在最佳滑移率附近[14]。模糊PID控制[14]克服了上述缺点,能实现PID控制参数随工况自整定,在不同工况下具有较好的适应性,但是模糊PID的参数模糊化、模糊规则推理、参数解模糊逻辑实现较为复杂,且隶属函数的确定需要大量的经验。
因此,本文以ABS为例,试图建立基于MAP的电控制动系统控制策略,实现实时、在线整定ECBS PID参数。基于ABS PID控制器,重点研究模拟退火粒子群优化算法自寻最优的PID控制参数MAP图,设计了基于MAP的兼顾汽车制动性能和方向稳定性的自适应PID控制器。考虑到各个车轮上充分利用路面的附着条件,只是间接地控制制动时的方向稳定性,并未把制动时的方向稳定性作为控制目标,本文在优化PID控制参数时考虑了整车横摆角速度的影响,给出了一种基于整车动力学的兼顾汽车制动性能和方向稳定性的汽车电控制动系统控制策略。
2 基于部件特性的制动系统模型
制动系统模型的精度直接影响电控制动系统的控制效果。为保证研究的准确性和真实性,本文建立基于部件特性的液压制动系统模型。制动系统模型各部件及其输入、输出关系如图1所示。

图1 制动系统模型
常规制动系统的制动轮缸压力是由制动踏板力经过制动踏板模型、真空助力器模型、主缸模型计算后得到的。
在汽车电控制动系统中,当ABS起作用时,制动轮缸压力会受到ABS控制器的控制和调节。
2.1 制动踏板
忽略制动踏板的惯量,将其简化为静力学杠杆模型。制动踏板输出力是制动踏板输入力与制动踏板机械杠杆比的乘积:

式中,Fpedal_out为制动踏板输出力;Fpedal_in为制动踏板输入力;γpedal_ratio为制动踏板机械杠杆比。
2.2 真空助力器
将真空助力器视为一个整体,通过台架试验获得稳态的输入输出特性曲线,并用一阶滞后环节近似地表达真空助力器的迟滞现象:

式中,Fboost为真空助力器力;fboost为真空助力器输入输出特性函数;Fboost_out为真空助力器输出力;Tapply为真空助力器加载时间常数;Trelease为真空助力器卸载时间常数。
2.3 主缸
忽略活塞的惯量,主缸内液体压强为:

式中,dmastercylinder为主缸活塞直径。
2.4 制动轮缸
忽略制动轮缸活塞惯量和制动液压力迟滞过程,将制动轮缸动力学模型简化为静力学模型,通过试验测量建立轮缸液压力与轮缸内液体体积的关系[15]。制动轮缸液压力为轮缸内液体体积的函数,通过对轮缸制动液流量积分求得轮缸内液体体积增量:

式中,Pcylinder为轮缸液压力;fcylinder为制动轮缸液压力关于轮缸内液体体积的函数;V为轮缸内液体体积;ΔV为轮缸内液体体积增量;Q为轮缸制动液流量;R为管路中制动液流入制动轮缸时的阻抗。
2.5 制动盘
制动盘上的制动力矩的计算取决于制动效能因数、制动轮缸压力、制动盘有效半径和制动轮缸有效工作面积。
制动盘输入功率为:

式中,Tb为制动力矩;ωwheel为车轮转速。
制动盘耗散功率为:

制动盘温度根据能量守恒规律由温度的变化求得,其温度变化为:

制动器制动效能因数为:

制动盘力矩为:

式中,Acylinder为制动轮缸有效工作面积;Re为制动器有效制动半径。
患者根据自身情况,设置用药计划、用药提醒方式,可以管理已设置好的用药计划;根据设定好的用药计划,到用药时间时,系统自动发出用药提醒;用完要后可进行签到,医院可根据患者签到情况给予适当奖励;用户可查看患者的历史用药种类、剂量等信息。
3 基于MAP的ECBS自适应PID控制方法
在传统PID控制理论基础上,应用模拟退火粒子群算法(Simulated Annealing Particle Swarm Optimization,SAPSO)识别特定车速和制动踏板力工况下的PID控制参数,形成离线全工况MAP图。在汽车实际行驶中,根据车速和制动踏板力信号在线插值得到PID控制参数,PID控制器根据在线插值得到的PID控制参数和滑移率偏差对轮缸压力进行控制和调节,以获得较好的制动性能和制动时的方向稳定性,控制策略如图2所示。

图2 控制策略
3.1 PID控制器
PID控制器以实际滑移率和最佳滑移率的偏差e作为输入,偏差的比例P、积分I和微分D的线性组合构成控制量,对制动力矩进行控制。其控制规律可以表达为:

式中,KP为比例系数;KI为积分系数;KD为微分系数。
为了获得较好的控制效果,PID控制参数KP、KI和KD应根据汽车行驶工况的变化进行调整,力求保持在最佳滑移率附近,但其调节依赖于一定的经验,而且手动调节需要大量的时间,为了克服上述缺点,采用SAPSO进行PID控制参数的识别。
3.2 PID控制参数识别
KP、KI和KD通过在特定车速和制动踏板力工况下,应用SAPSO离线识别得到,其他工况的控制参数值根据车辆状态在线插值得到。
SAPSO[16]结合了粒子群优化算法(PSO)[17~18]全局寻优能力强、实现简单的优点,还结合了模拟退火算法(SA)[19~20]跳出局部最优解能力强的优点;在参数辨识、函数优化、模式分类等领域得到了广泛应用。因此,本文选择模拟退火粒子群优化算法进行PID控制参数的识别。适应度函数为:

式中,λji为第j个车轮在第i个仿真步长的实时滑移率;λideal为最佳滑移率;ωi为第i个仿真步长的横摆角速度;αλ为滑移率权重系数;αω为横摆角速度权重系数,通过权重系数的设定,可以在制动性能和制动时的方向稳定性之间折中。
经SAPSO离线识别的前轮PID控制参数MAP图如图3所示。汽车行驶过程中的PID控制参数可以根据车速和制动踏板力信号在MAP图中插值得到。
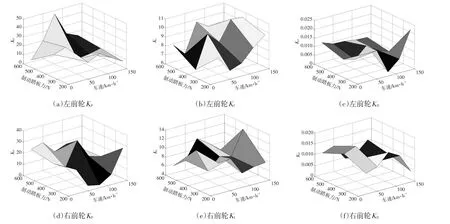
图3 PID控制参数MAP图
4 仿真算例
在基于部件特性的制动系统及整车模型的基础上,验证基于MAP的PID控制策略的控制效果。为了验证控制策略在不同工况下的自适应性,输入的制动踏板力是变化的,如图4所示。设定初始车速为120 km/h,汽车在干沥青路面上进行制动试验,最佳滑移率设为0.2,得到滑移率变化曲线(见图5)、车速和轮速变化曲线(见图6)、车辆横摆角速度变化曲线(见图7)。

图4 制动踏板力变化曲线
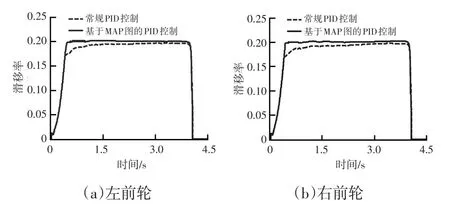
图5 前轮滑移率变化曲线

图6 车速、前轮轮速变化曲线
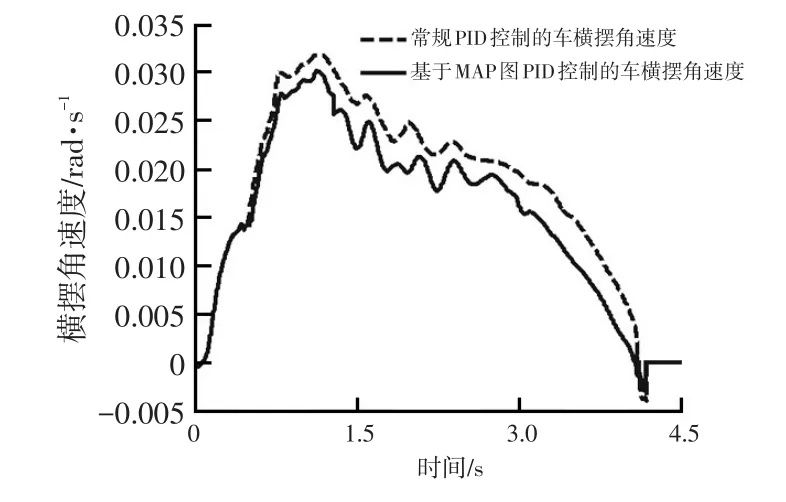
图7 横摆角速度变化曲线
汽车在干沥青路面制动过程中,常规PID控制参数为定值,滑移率与理想滑移率有一定的偏差和波动,不能使所有工况都达到理想控制水平,而基于MAP的PID控制器能根据工况实时查询控制参数,滑移率基本保持在理想滑移率附近,且变化平稳。基于MAP的PID控制器与常规PID控制相比,滑移率与理想滑移率的最大偏差降低了14.68%,制动时间由4.25 s缩短为3.97 s。
在PID控制器起作用后,基于MAP的PID控制的横摆角速度比常规PID控制的横摆角速度小,横摆角速度最大下降率达到9.90%,车辆在制动时的方向稳定性较好。
5 实车验证
为了进一步验证本文控制策略的有效性和实时性,对某型试验车辆进行实车试验,并将仿真曲线与实车试验曲线进行对比,驾驶员制动踏板力输入曲线如图8所示。

图8 制动踏板力
以前轮为例,轮缸压力变化曲线如图9所示,由图9可知,在制动开始到车速为零这段时间历程内,仿真曲线中的轮缸压力与试验数据一致性较好。整车纵向加速度变化曲线如图10所示,仿真曲线与试验曲线一致性较好,验证了本文控制策略的有效性和实时性。
6 结束语
通过上述仿真结果和实车试验曲线分析,可以得到以下结论:
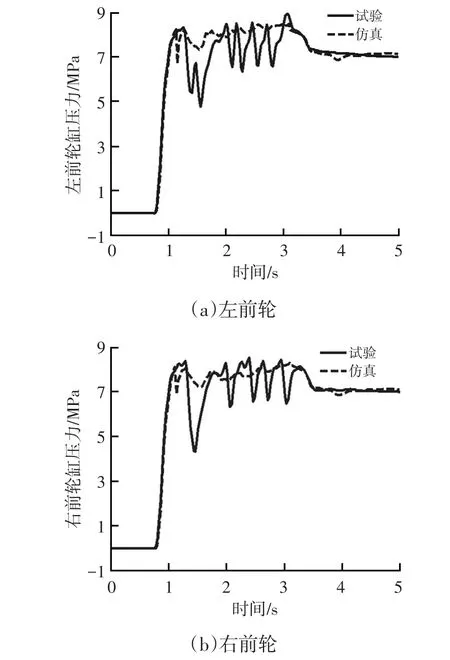
图9 轮缸压力变化曲线
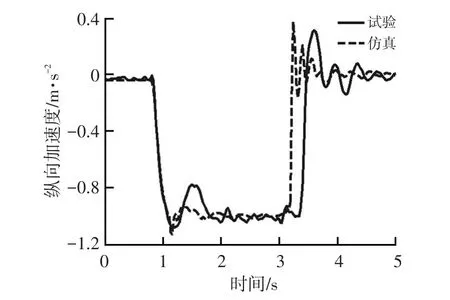
图10 纵向加速度变化曲线
a.基于MAP图的自适应PID控制的汽车在制动时,根据行驶工况实时地更新PID控制参数,实时性较好,滑移率的波动较小,基本保持在期望滑移率附近,在复杂工况下也能达到理想的控制效果,改善了制动性能,缩短了制动时间,提高了汽车制动时的抗干扰性和鲁棒性。
b.在优化目标函数里考虑横摆角速度的ABS控制策略能够较好地兼顾汽车制动过程的方向稳定性,制动时的横摆角速度较小,提高了制动安全性。
c.基于部件特性的制动系统的建模考虑了制动系统的更多细节,建立的制动系统精度更接近真实制动系统,为更好地验证控制策略奠定了模型基础。
1 孙仁云,李治.变路面汽车电控制动系统H∞控制研究.西华大学学报:自然科学版,2010,(2):114~118.
2 赵双.汽车电子感应制动控制系统(SBC)的研制:[学位论文].成都:西华大学,2006.
3 宋正伟.电子控制制动系统的应用技术.上海汽车,2011,(10):42~45.
4 宗长富,李伟,郑宏宇,等.汽车列车电控制动系统制动力分配的控制算法.汽车工程,2011,(10):885~889+910.
5 盛毅.基于模糊控制的行车制动电控系统:[学位论文].长春:吉林大学,2008.
6 张鸿生.汽车电控液压制动系统性能分析与控制:[学位论文].南京:南京航空航天大学,2013.
7 郑太雄,马付雷.基于逻辑门限值的汽车ABS控制策略.交通运输工程学报,2010,(2):69~74.
8 韩文涛,贾安民,袁志业.汽车ABS的逻辑门限值控制研究.北京汽车,2003,(6):28~30.
9 席本强,何毅,丘文森.汽车ABS的模糊自适应PID控制.辽宁工程技术大学学报:自然科学版,2014,(11):1551~1555.
10 李开春.基于车轮滑移率的ABS控制算法研究:[学位论文].镇江:江苏大学,2006.
11 Pedro1 J O,Dahunsi1 O A,Nyandoro O T.Direct adaptive neural control of antilock braking systems incorporated with passive suspension dynamics.Journal of Mechanical Science and Technology,2012,26(12):4115~4130.
12 王博,孙仁云,徐延海,等.考虑路面不平度的路面识别方法.机械工程学报,2012,(24):127~133.
13 刘志强,唐忠刚.基于滑移率的ABS粒子群优化PID仿真控制研究.重庆交通大学学报:自然科学版,2013,(5):1096~1100.
14 朱伟兴,陈垠昶.模糊PID控制在汽车ABS中的应用与仿真研究.江苏大学学报:自然科学版,2004,(4):310~314.
15 刘晓.基于特性的制动系统动态建模与分析:[学位论文].长春:吉林大学,2012.
16 Eberhart R,Kennedt J.A new optimizer using particle swarm theory.Proc of the sixth international symposium on Micro Machina and Human Science,Nagoya,1995.
17 Kennedy J,Eberhart R.Particle swarm optimization.IEEE International Conference on Neural Networks,Perth Austra⁃lia,1995.
18 高鹰,谢胜利.基于模拟退火的粒子群优化算法.计算机工程与应用,2004(1):47~50.
19 Wang B,Guan H,Lu P,et al.Novel Evaluation Method of Vehicle Suspension Performance Based on Concept of Wheel Turn Center.Chinese Journal of Mechanical Engi⁃neering,2015,28(5):935~944.
20 冯玉蓉.模拟退火算法的研究及其应用:[学位论文].昆明:昆明理工大学,2005.
(责任编辑 斛 畔)
修改稿收到日期为2016年8月22日。
Study on Control of Vehicle Electronic Control Braking System Based on MAP for Different Load Conditions
Wang Ying,Wang Bo,Guo Rui,Guan Xin,Xu Liang
(State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130025)
In order to improve the real-time control precision of the automobile Electronic Control Braking System (ECBS)in different load conditions,we proposed the online self-optimization method of ECBS control parameters based on MAP in this research.Firstly,we established a hydraulic braking system model based on component characteristics and ECBS controller,and conducted step brake tests at different speeds.The Simulated Annealing Particle Swarm Optimization (SAPSO)method was utilized to identify the optimal PID control parameters in each condition.Then the MAP was obtained.Thus,during braking,the control parameters could be obtained by online searching the MAP according to the speed and the brake pedal force.The simulation and real vehicle test results indicated that the ECBS system based on MAP could shorten the braking distance,and effectively improve directional stability.
ECBS,MAP,PID control,SAPSO
电控制动系统 MAP PID控制 模拟退火粒子群算法
U463.52
A
1000-3703(2017)03-0042-05
*通讯作者:郭睿(1978—),女,讲师,工学博士,研究方向为汽车动力学与仿真,guor@jlu.edu.cn。
猜你喜欢
汽车实用技术(2022年12期)2022-07-05
军民两用技术与产品(2021年8期)2021-11-24
汽车实用技术(2021年17期)2021-09-23
汽车观察(2021年4期)2021-05-10
汽车与新动力(2019年5期)2019-11-07
科技与创新(2018年12期)2018-11-29
科学与财富(2018年28期)2018-11-16
汽车维护与修理(2018年15期)2018-02-22
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11