新一代线控底盘集成控制策略研究
2017-05-08 04:45魏青杨建森李飞
汽车技术 2017年3期
魏青杨建森李飞
(1.天津公安消防总队,天津 300000;2.中国汽车技术研究中心,天津 300300)
新一代线控底盘集成控制策略研究
魏青1杨建森2李飞2
(1.天津公安消防总队,天津 300000;2.中国汽车技术研究中心,天津 300300)
针对汽车稳定性控制,提出了一种基于线控转向和线控制动的新一代底盘集成控制策略。分别设计制造了线控制动、线控转向系统样机,建立了相应的动力学模型。应用模型预测控制,设计了基于主动前轮转角调节和主动制动力调节的底盘集成控制系统。设计了针对目标汽车的底盘集成控制硬件在环试验台,并进行了典型工况测试试验。结果表明,本文所设计的控制策略可有效使汽车跟随期望状态,保证车辆行驶的稳定性,提升车辆的综合性能。
1 前言
研究表明,汽车侧滑失稳是造成交通事故的主要原因之一[1~4]。为此,各大汽车厂商、研究机构进行了深入研究,先后设计生产了许多稳定性控制系统,如DSC[5~7]、ESP、VSC[8]等。目前广泛应用的汽车稳定性控制系统大多采用单一控制方式进行稳定性调节,这种单一的控制方式对于提高汽车稳定性有一定帮助,但是受系统自身特性的影响,此种控制方式存在某些局限:基于主动转向控制的稳定性控制系统在轮胎侧向力达到饱和状态时便会失去控制作用;基于主动制动控制的稳定性控制系统会显著影响车辆质心侧偏角,增加汽车侧倾危险。因此,将多种控制方法集成,通过协调控制的方式,充分发挥各控制方式的优点、弥补其不足是目前汽车稳定性控制研究的重点[9~10],其中,基于主动制动与主动转向调节的制动转向协调控制是一大研究热点。
但随着稳定性控制系统的不断升级,控制系统变得越来越复杂,对控制执行器的要求也越来越高,而传统汽车的制动系统和转向系统结构的局限性限制了稳定性系统的发展,出现许多无法克服的问题:传统液压制动系统的响应速度、控制精度都难以满足现代控制的要求,且其液压油对温度敏感,稳定性差;传统转向系统传动比固定,不易于实现主动转向控制;在传统汽车上集成稳定性控制系统会导致汽车结构更为复杂,增加了汽车设计、制造、装配、维修等多方面的难度。
采用线控制动及线控转向系统的汽车则可以完全避免上述问题的出现。线控系统的兼容性强,只需在中央控制器中加入相关的稳定性控制算法,即可轻松实现对汽车稳定性的控制。另外,线控系统具有的优越特性决定了它能够使控制变得更加迅速、精确。因此,针对线控制动及线控转向系统集成控制的研究具有重大意义。
2 新一代线控底盘执行机构设计
2.1 线控制动系统设计
针对线控制动系统的工作原理及设计要求,本文设计了一款线控制动系统硬件,由执行器和控制器组成。
图1所示为线控制动系统执行器,包括动力装置、传动装置、制动钳体和传感器4个部分。
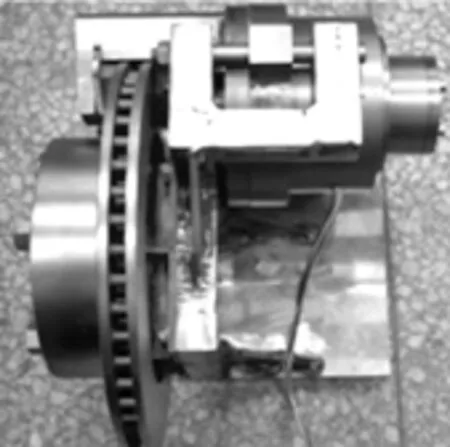
图1 线控制动系统执行机构
动力装置将电能转化为机械能为执行器提供能量,是执行器的主要部件,采用137LWX无刷直流电机。
传动装置包括两部分:减速装置,用于降低电机输出转速、提高输出转矩,在保证输出转矩要求的条件下满足线控制动执行器的尺寸、质量要求,选用自行设计的行星齿轮机构作为减速装置;运动转换机构,用于将旋转运动转化为直线运动,以实现驱动制动钳对制动盘的夹紧、放松,采用滚珠丝杠副作为运动转换机构。
传感器用于为线控制动系统控制器实时采集相关信号。电流传感器用于测量电机电流,本文电流传感器集成在电机驱动电路中;转速传感器用于测量电机转速,采用长春华特光电技术有限公司E2040型光电编码器;压力传感器用于测量制动钳施加给制动盘的正压力,采用德国HBM公司的C9B型压力传感器及AE101型放大器,量程0~20 kN,响应频率1 kHz。
线控制动系统控制器需要快速响应上级控制器的目标制动力信号,通过准确的分析计算,输出稳定的电机驱动信号,驱动电机产生目标制动力。本文设计的线控制动控制系统包括控制电路和驱动电路两部分,工作原理如图2所示。
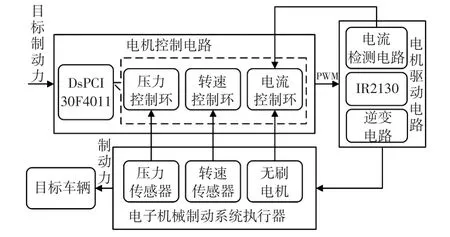
图2 线控制动系统控制器工作原理
控制电路采用美国Microchip公司专门针对电机控制而推出的16位数字信号控制DSP芯片dsPCI 30F4011作为中央处理器。
驱动电路是线控制动控制系统的关键部分,用于根据控制电路输出的PWM信号向电机输出相应三相电流,以驱动电机产生相应转矩。本文结合三相无刷直流电动机的特点,开发了基于IR2130的电机驱动系统,主要包括IR2130驱动电路、逆变电路和电流检测电路。
2.2 线控转向系统设计
线控转向系统分为转向操纵机构、转向执行机构和中央控制单元,总体方案如图3所示。
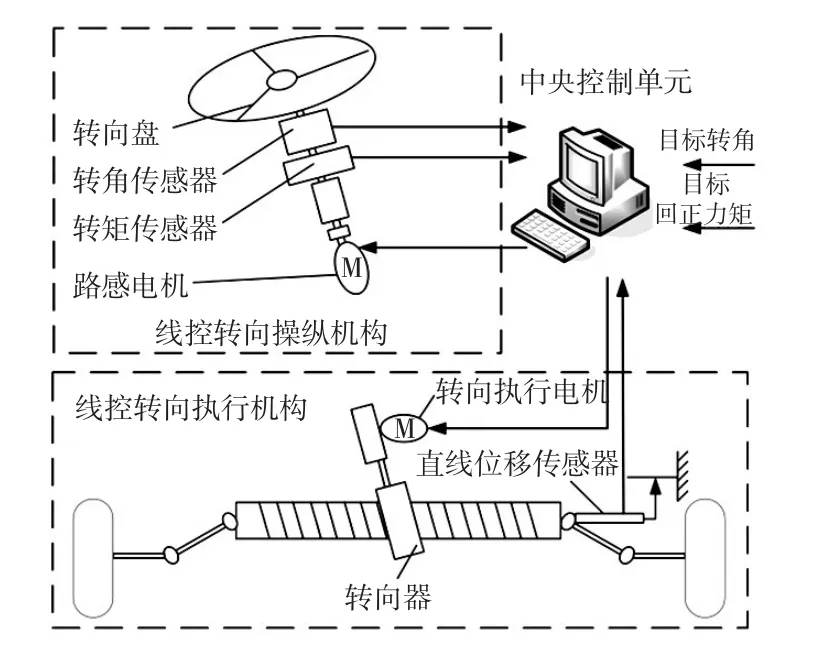
图3 线控转向系统总体方案
转向操纵机构主要包括转向盘、转角传感器、转矩传感器、路感电机及其减速器,如图4所示。转向操纵机构通过转角传感器和转矩传感器将驾驶员的转向意图传递给中央控制单元,同时接受中央控制单元向路感电机发送的控制信号,驱动路感电机产生转向盘回正力矩,为驾驶员提供路感信息。

图4 线控转向系统操纵机构
路感电机采用北京勇光高特微电机有限公司生产的90LWX型永磁无刷直流力矩电机,减速器采用湖北传动设备有限公司生产的PL060型减速器。
转向执行机构主要包括齿轮齿条转向器、转向执行电机、转向阻力传感器和直线位移传感器,如图5所示。转向执行机构采集转向阻力传感器和直线位移传感器信号,并将其发送给中央控制单元,同时接受中央控制单元发送的转向控制信号,驱动转向执行电机旋转,带动齿轮齿条转向器产生相应前轮转角,实现车辆转向。

图5 线控转向执行机构
3 新一代线控底盘动力学建模
3.1 底盘动力学模型总体方案
对带有本文自主设计的线控制动与线控转向系统的某轻型汽车进行动力学分析,建立针对该目标车辆的汽车动力学模型,该车型为传统机械传动、前轮转向、四轮驱动的轻型汽车。
汽车动力学模型结构方案如图6所示,图中i=fl,fr,rl,rr,分别表示左前、右前、左后、右后车轮。汽车动力学模型主要包括驾驶员模型、发动机模型、传动系及车轮动力学模型、车轮滑动率及侧偏角计算模块、轮胎模型、整车模型、车轮动载荷计算模块、发动机转速计算模块以及线控制动系统模型和线控转向系统模型。
3.2 线控制动系统模型
线控制动系统模型包括电机模型、传动机构模型和负载模型。
电机模型如图7所示,表1为该模型相关符号说明。该电机模型描述了电机内部机电转化关系,即输入电压与输出转矩之间的关系。
电机工作时:
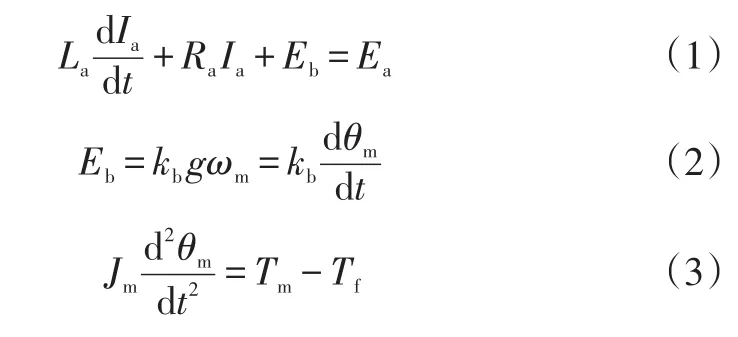

式中,k为电机力矩系数;θm为电机转轴角位移;Tf为电机负载转矩;kb为线控制动系统电机反馈电动势系数;ωm为电机转速。
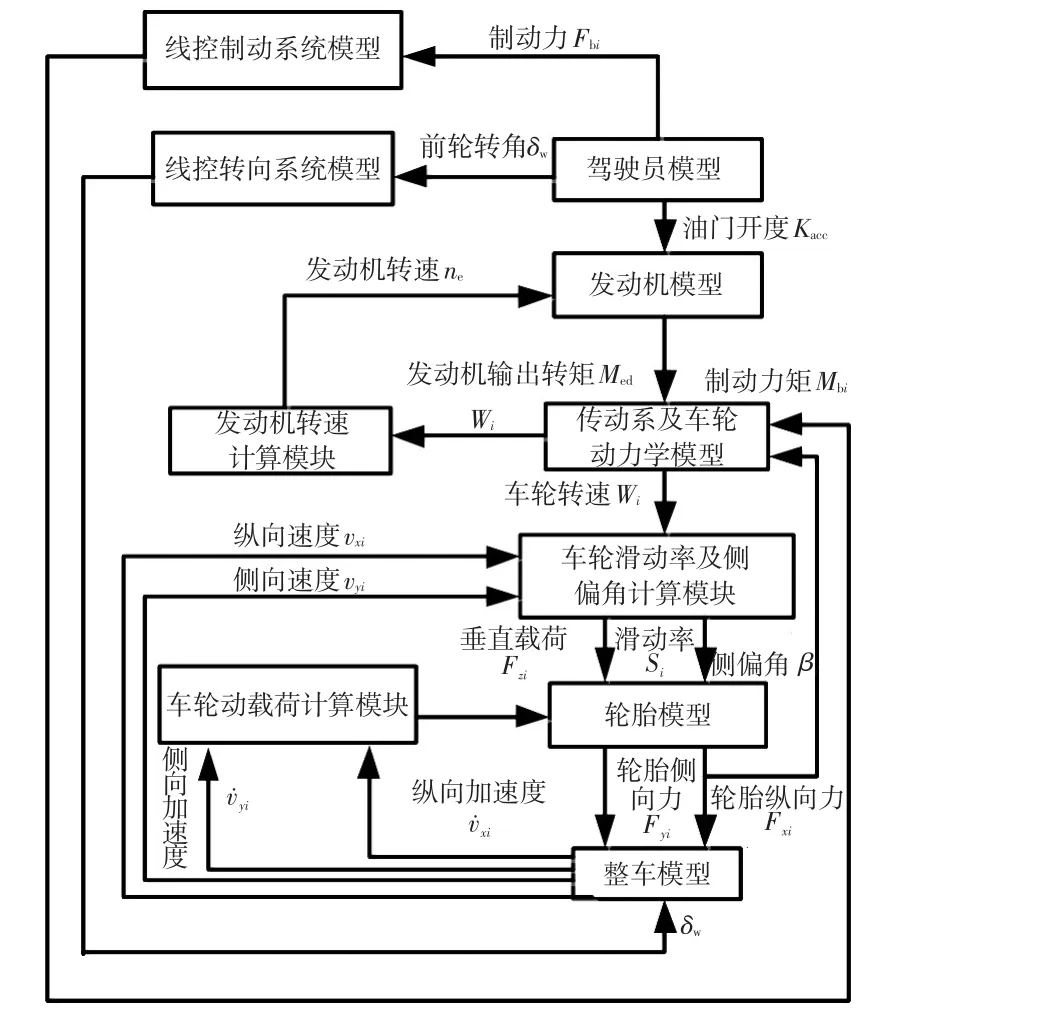
图6 基于线控制动和线控转向系统的汽车动力学模型总体结构
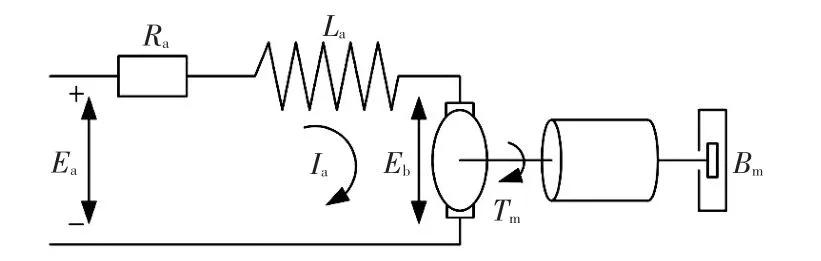
图7 电机模型工作原理
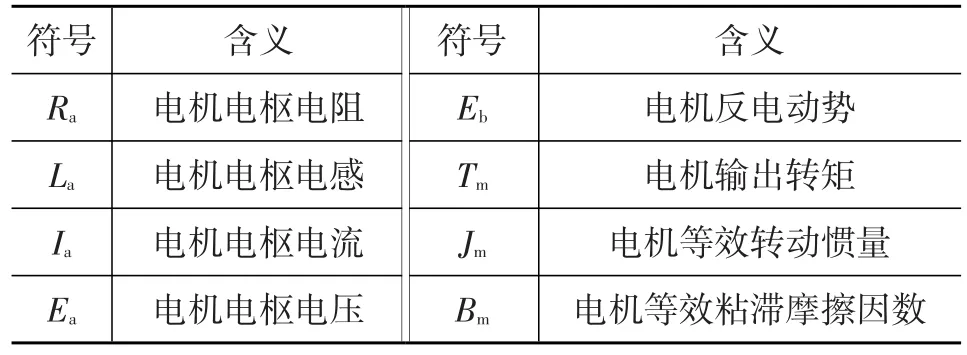
表1 电机模型符号说明
传动机构模型:
式中,Lm为丝杠螺纹导程;im为减速装置传动比;θl为丝杠角位移;sl为丝杠水平位移。
负载模型:
线控制动系统丝杠输出压力与丝杠位移存在某确定关系,查阅相关资料并进行大量试验后,得出丝杠输出压力与位移的关系为[11]:

式中,cl为拟合系数,需要通过试验测量得到;Fl为丝杠输出压力。
由丝杠输出压力得到车轮制动力矩为:

式中,μl为制动器摩擦因数;Rb为制动器有效半径。
3.3 线控转向系统模型
线控转向系统模型包括转向操纵机构模型和执行机构模型。
线控转向系统操纵机构工作原理如图8所示,图中符号含义如表2所示,操纵机构模型由转向盘、转向轴、减速器和路感电机组成。转向盘通过转向轴及减速器与路感电机相连。转向盘输入力矩与路感电机输出力矩形成相互作用力。
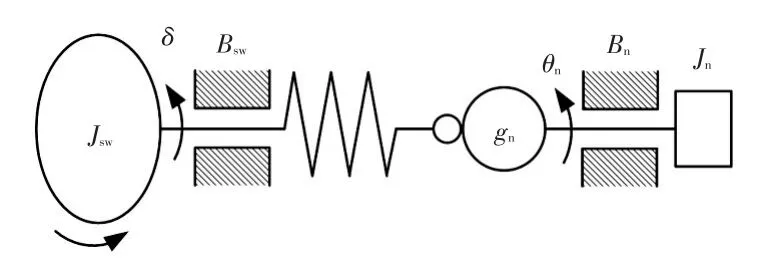
图8 线控转向系统操纵机构工作原理
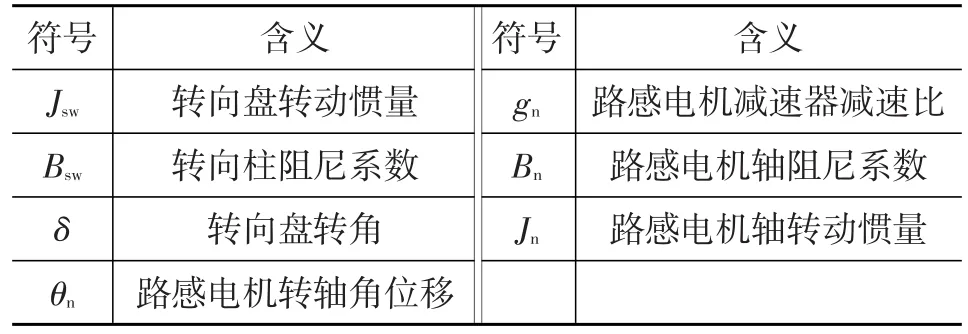
表2 线控转向系统操纵机构符号说明
系统模型为:
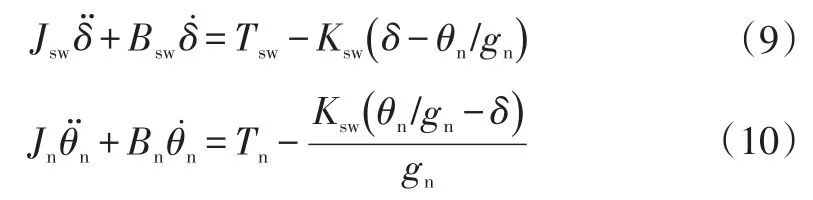
式中,Tsw为转向盘输入力矩;Ksw为转向柱扭转刚度;Tn为路感电机输出力矩。
线控转向系统执行机构工作原理如图9所示,图中符号含义如表3所示。执行机构模型由转向执行电机、减速器、齿轮齿条机构和转向轮组件组成。转向执行电机的输出力矩通过减速器作用于齿轮齿条机构,齿轮齿条机构驱动转向轮转动。
系统模型为:
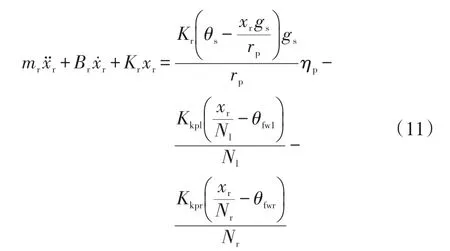

式中,ηp为线控转向系统执行机构转向器正效率;Tl、Tr分别为左、右转向轮转向阻力矩。
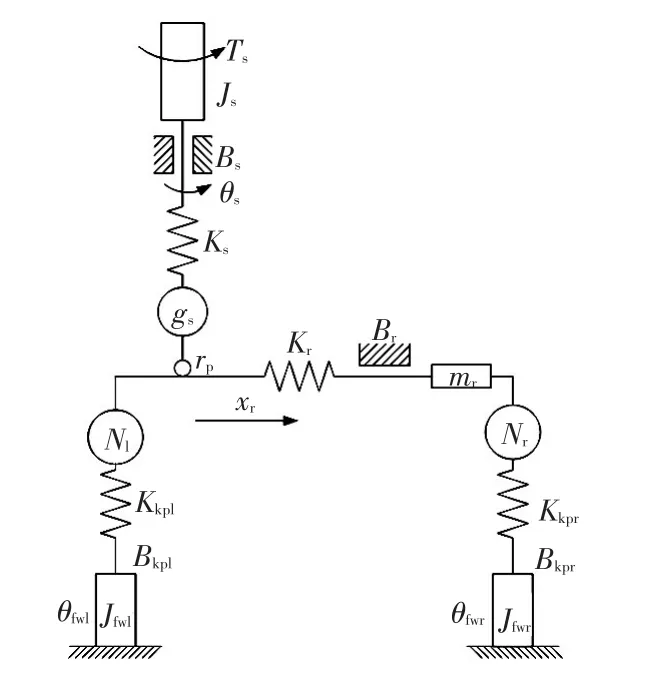
图9 线控转向系统执行机构工作原理
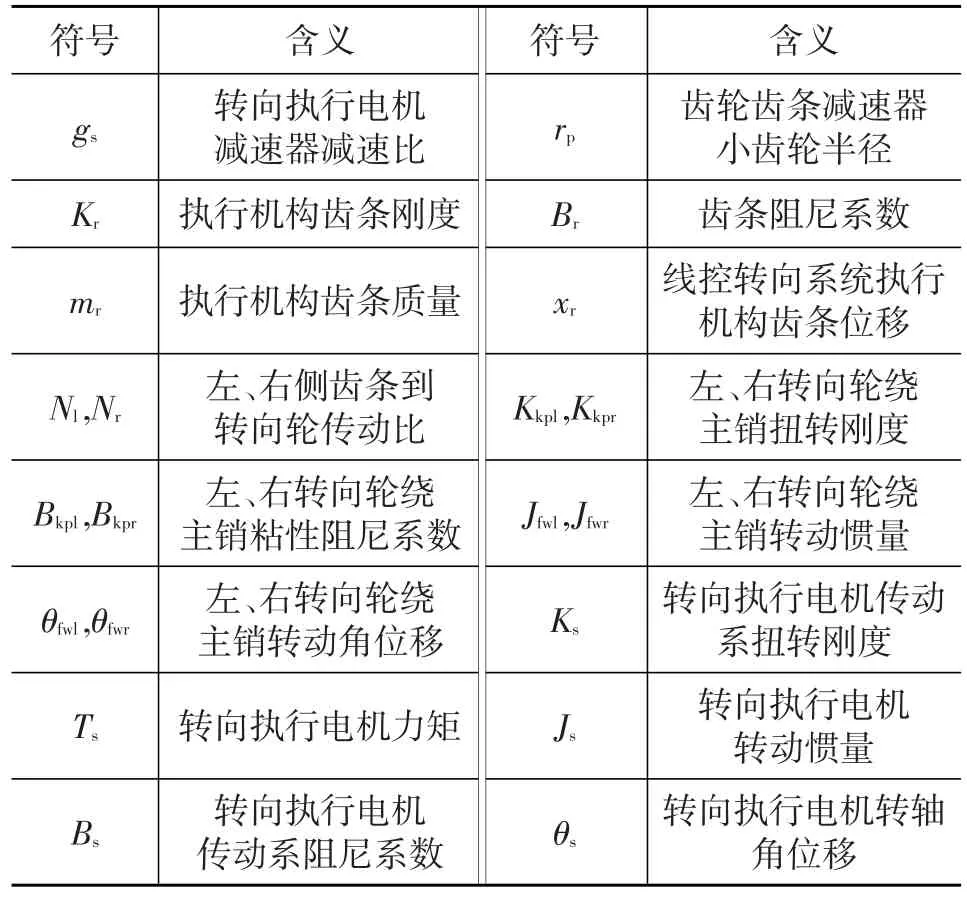
表3 线控转向系统执行机构符号说明
4 新一代线控底盘集成控制策略
4.1 线控底盘集成控制总体结构
本节研究的线控底盘集成控制系统,是为保证车辆行驶稳定性而对汽车的线控制动系统和线控转向系统进行协调控制的系统,其总体结构如图10所示,主要包括用于采集和估算汽车状态信息的汽车状态感知器、输出汽车状态目标值的汽车参考模型、制动转向协调控制算法、主动横摆力矩分配策略以及包括线控制动和线控转向系统在内的执行机构。其中,δz为主动前轮转角;Fzbi为各车轮主动制动力;Fd为制动踏板力;为各车轮主动制动力目标值;β为汽车质心侧偏角;γ为汽车横摆角速度;μ为路面附着系数;βref为汽车质心侧偏角目标值;γref为汽车横摆角速度目标值;为主动前轮转角目标值。
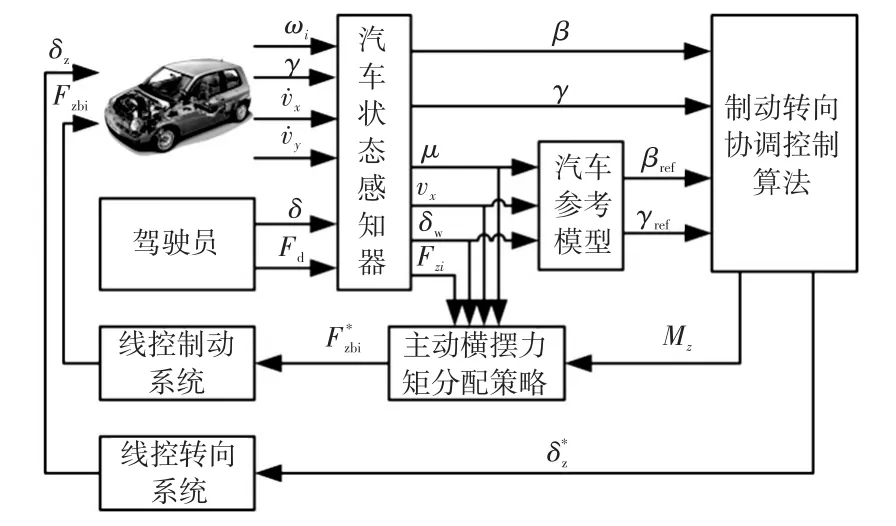
图10 底盘集成控制系统总体结构
4.2 基于MPC的线控底盘集成控制算法
采用模型预测控制(Model Predictive Control,MPC)进行线控底盘集成控制算法设计。MPC算法在汽车领域得到了广泛应用[12~15]。
本文将MPC控制应用到横摆稳定性方面,通过预测车辆未来的横摆角速度和质心侧偏角,并根据预测值,实时地对车辆加以控制。控制器利用采集到的数据,判断车辆将处于不足转向还是过度转向状态,系统再根据不同的状态对车辆进行主动线控转向控制和主动线控制动控制。基于MPC的线控底盘集成控制原理如图11所示。图中,xref(t)为本时刻车辆期望状态;x(t)为本时刻车辆实际状态;u(t-1)为上一时刻的控制量;为下一时刻预测状态量;Δu(t)为本时刻控制量增量。MPC预测控制模型通过x(t)和u(t-1)预测,通过优化性能指标并结合期望状态量xref(t)计算出最优的Δu(t)。
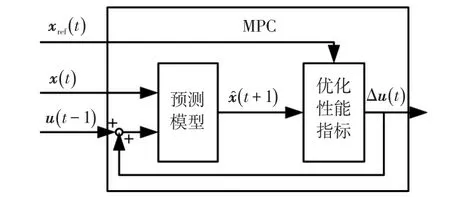
图11 基于MPC的底盘集成控制原理
MPC预测控制模型通过二自由度车辆参考模型得到。为了描述最终的空间优化控制问题,首先通过欧拉法将二自由度车辆状态方程离散化:

式(13)和式(14)为MPC稳定性协调控制器中使用的预测模型。
优化指标中的第1项用于保证状态轨迹对目标轨迹的跟踪,即预测轨迹要尽可能地接近目标轨迹;第2项用于限制转向和制动的控制幅度,希望其变化量尽可能小;第3项用于限制转向力和制动力,在车辆自身条件限制下,输出的转向力和制动力必须在车辆能够满足的范围内。
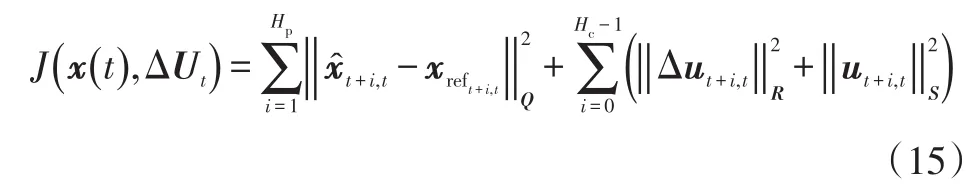
利用上面的MPC稳定性协调控制器可以求得所需的控制量前轮转角Δδw和横摆力矩ΔMz,其中,Δδw发送至线控转向系统直接控制车辆的前轮转角,ΔMz需要通过一定的分配策略,求解出4个车轮的纵向力,并运用轮胎逆模型求解目标滑移率,最后根据目标滑移率与实际滑移率之差求解各轮胎的目标制动力。由ΔMz求得目标制动力的流程图如图12所示。其中,ΔFxi为车轮纵向力;为目标滑移率;为各轮胎的目标制动力(i=fl,fr,rl,rr,分别表示左前、右前、左后、右后)。
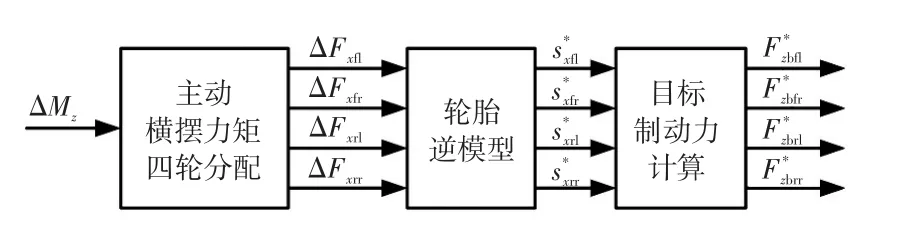
图12 求解目标制动力流程
5 测试验证与分析
5.1 硬件在环试验台搭建
基于线控制动、转向系统的新一代线控底盘集成控制硬件在环试验台分为硬件、软件、实时平台和信号处理4个部分,其结构方案如图13所示。
硬件在环试验台软件采用Matlab/Simulink建立相应的模型。利用RTW(Real-Time Workshop)对替代模型进行编译,将其转化为可以在Matlab/xPC Target实时内核上运行的实时代码,即汽车动力学实时模型。
实时平台由3台计算机组成,其中1台作为主机,另外2台作为目标机。主机运用Matlab/Simulink编写汽车动力学模型及控制算法,进行离线仿真,并将车辆模型和控制算法编译成可以在目标机运行的实时代码;目标机作为实时平台,运行车辆模型和控制算法的实时代码,并作为I/O板卡的载体,完成信号的采集、输出。主机与目标机的通信可以采用PC串口通信或TCP通信。
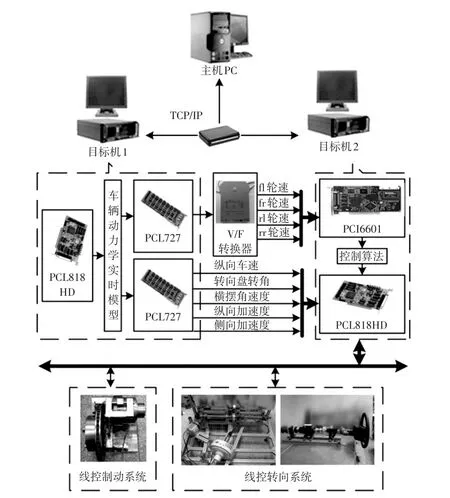
图13 硬件在环试验台结构方案
硬件在环试验台信号处理部分由若干I/O板卡、采集模块和CANoe总线开发工具组成。
5.2 双移线工况试验
仿真工况参考ISO 3888-1双移线工况,汽车初始速度130 km/h,路面附着系数0.8,转向盘角输入如图14所示,仿真时间7 s,仿真参数选择如表4所示,测试试验结果如图15所示。

图14 驾驶员转向盘转角输入
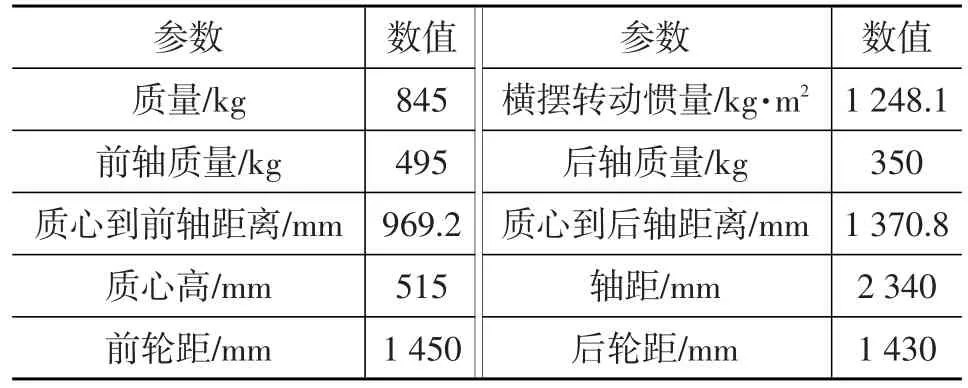
表4 仿真参数
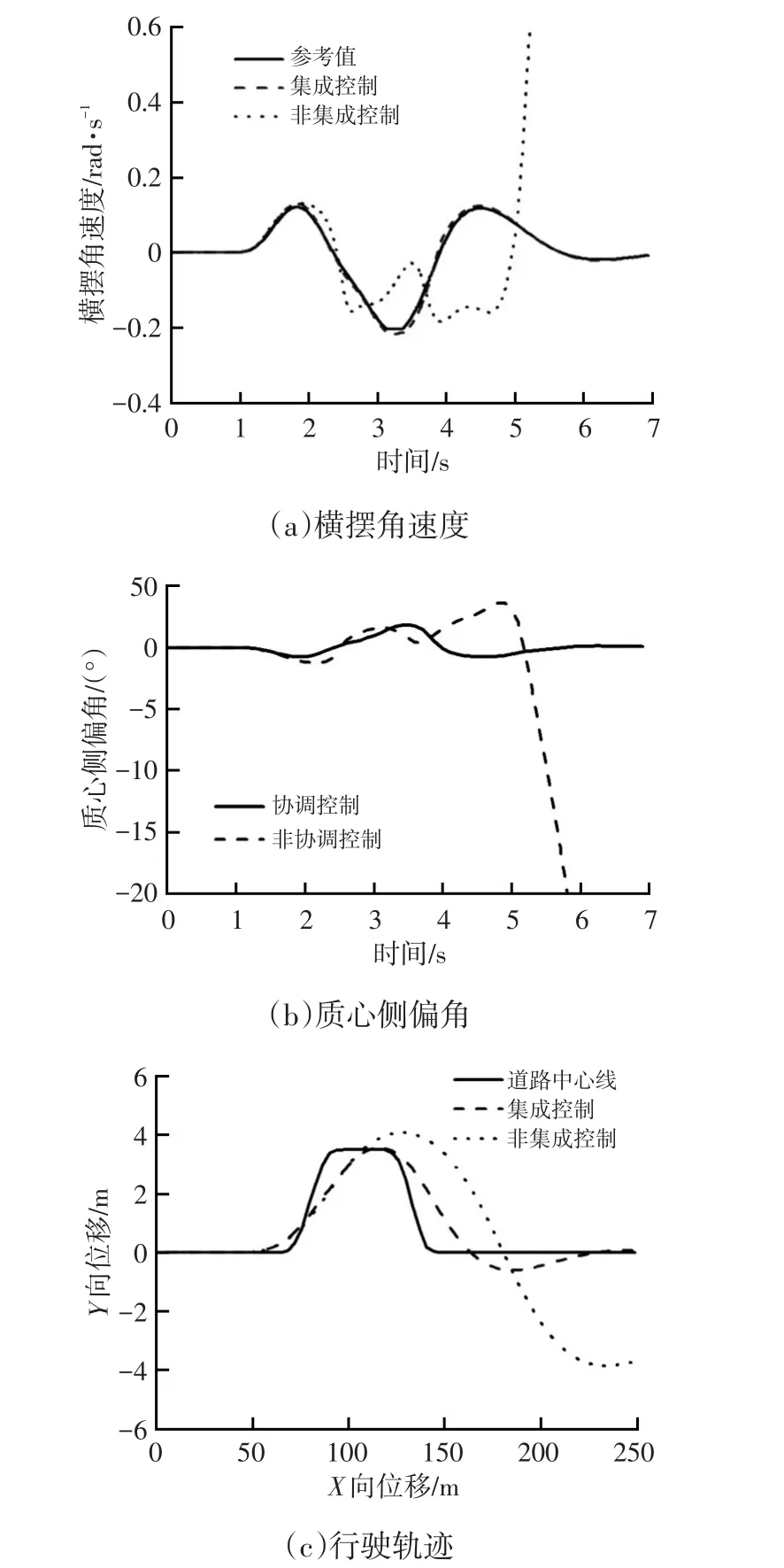
图15 测试试验结果
由图15可知,没有进行转向、制动集成控制的情况下,汽车不能沿规定路线行驶,第2.5 s起汽车实际横摆角速度与目标横摆角速度分离且偏差迅速增大,汽车质心侧偏角也迅速增大,汽车侧滑失稳,发生危险。在加入了制动、转向集成控制后,通过主动制动和主动前轮转角调节能够使汽车实际横摆角速度始终严格跟随目标横摆角速度,二者间基本无偏差,汽车能够安全平稳地沿试验规定路线行驶。
6 结束语
本文以某轻型汽车为研究对象,针对新一代底盘集成控制策略开展研究,制造了线控制动和线控转向系统样机并建立了其动力学模型,应用MPC算法,设计了基于主动前轮转角调节和主动制动力调节的协调控制系统,硬件在环试结果表明,该控制策略可有效使汽车跟随期望状态,保证车辆的行驶稳定性。
1 van Zanten A T,Erhardt R,Landesfeind K,et al.VDC system development and perspective.SAE Paper 980235,1998.
2 van Zanten A T.Bosch ESP systems:5 years of experience.SAE Technical Paper 2000-01-1633,2000.
3 郭孔辉.汽车操纵动力学.长春:吉林科学技术出版社,1991.
4 M.米奇克.汽车动力学:C卷.第二版.陈萌兰译.北京:人民交通出版社,1997.
5 Leffler H.Consideration of lateral and longitudinal vehicle stability by function enhanced brake and stability control system.SAE 940832,1994.
6 Straub A.DSC(Dynamic Stability Control)in BMW 7 series cars.InternationalSymposium on Advanced Vehicle Control,1996.
7 Kraft H J.The integrated brake and stability control system of the new BMW 850i.SAE 900209,1990.
8 United States National Highway Traffic Safety Administra⁃tion.FMVSS No.126 Electronic Stability Control Systems, NHTSA Final Regulatory Impact Analysis.2007.
9 Masato Abe,Naoto Ohkubo,Yoshio Kano.A direct yaw moment control for improving limit performance of vehicle handling-comparison and cooperation with 4WS.Vehicle System Dynamics,1996,25(sup1):3~23.
10 姜炜,余卓平,张立军.汽车底盘集成控制综述.汽车工程,2007,29(5):420~425.
11 冯虎田.滚珠丝杠副动力学与设计基础.北京:机械工业出版社,2015.
12 Chang S,Gordon T J.A predictive control for optimal braking torque distribution in vehicle stability controls.The 8th International Symposium on Advanced Vehicle Control,2006.
13 杨建森,郭孔辉,丁海涛,等.基于模型预测控制的汽车底盘集成控制.吉林大学学报:工学版,2011(增刊2):1~5.
14 Chang S,Gordon T J.Gordon.Improvement of Vehicle Dynamics using Model-based Predictive Control.SAE Paper,2009-01-0427,2009.
15 Falcone P,Tseng H E,Borrelli F,et al.MPC-based yaw and lateral stabilisation via active front steering and braking.Vehicle System Dynamics,2008,46(sup1):611~628.
(责任编辑 斛 畔)
修改稿收到日期为2016年10月12日。
Research on New Generation Drive-by-Wire Integrated Chassis Control Strategy
Wei Qing1,Yang Jiansen2,Li Fei2
(1.Tianjin Public Security Fire Corps,Tianjin 300000;2.China Automotive Technology and Research Center, Tianjin 300300)
A new generation integrated chassis control strategy based on brake-by-wire and steer-by-wire is presented for vehicle stability control.The prototypes of brake-by-wire system and steer-by-wire system were designed and made,and corresponding dynamics model was built.An integrated chassis control system based on active steering regulation of front wheels and active regulation of braking force was designed using model predictive control.A hardwarein-the-loop test bench for integrated chassis control was built for target vehicle.Tests were conducted in typical working conditions.Results showed that the designed control strategy can keep the vehicle in the desired state,ensure the driving stability and enhance the performance of the vehicle.
Brake-by-wire system,Steer-by-wire system,Stability control,Integrated chassis control,Model predictive control
线控制动系统 线控转向系统 稳定性控制 底盘集成控制 模型预测控制
U463.1
A
1000-3703(2017)03-0001-07
猜你喜欢
汽车之友(2021年23期)2021-12-24
汽车实用技术(2021年17期)2021-09-23
汽车观察(2021年4期)2021-05-10
汽车与新动力(2019年5期)2019-11-07
科学与财富(2018年28期)2018-11-16
汽车工程师(2018年3期)2018-07-12
中国高新技术企业(2015年17期)2015-05-18
企业技术开发·中旬刊(2014年7期)2014-09-23