
脉冲星导航试验卫星科学观测数据分析*
2017-05-03 00:58张新源黄良伟陈绍龙邓楼楼陈建武石永强薛立军丁强强
空间控制技术与应用 2017年2期
帅 平,张新源,黄良伟,陈绍龙,邓楼楼,陈建武,石永强,薛立军,丁强强
(1.钱学森空间技术实验室,北京 100094; 2.北京控制工程研究所,北京 100190;3.深圳航天东方红海特卫星有限公司,深圳 518054)
脉冲星导航试验卫星科学观测数据分析*
帅 平1,张新源1,黄良伟1,陈绍龙1,邓楼楼2,陈建武2,石永强2,薛立军3,丁强强3
(1.钱学森空间技术实验室,北京 100094; 2.北京控制工程研究所,北京 100190;3.深圳航天东方红海特卫星有限公司,深圳 518054)
脉冲星导航试验卫星是我国发射的一颗专用试验卫星.经过4个多月的在轨观测,该卫星已成功获取了大量观测数据.介绍利用该卫星搭载的掠入射聚焦型X射线探测器在近4个月中对PSR B0531+21获得的观测数据第一批处理结果.本文详细阐述掠入射聚焦型X射线探测器的观测模式,给出脉冲星观测数据的处理方法以及脉冲星参数的拟合过程,利用基于第一手观测数据的脉冲星精化参数验证掠入射聚焦型探测器在轨工作性能,得以回答使用国产X射线探测器是否能够“看得见”脉冲星问题.
脉冲星导航;飞行试验;数据分析;X射线探测器;轮廓折叠
0 引 言
X射线脉冲星是一种天然信标,能辐射稳定的X射线脉冲信号,利用X射线脉冲星导航是一种新型的天文导航,是真正意义上的自主导航.通过对脉冲信号的计时观测,可获取高精度的测距信息与时间信息,通过对脉冲星成像,也可获取姿态信息[1-3].脉冲星导航是适用于整个太阳系的自主导航技术,对于任务不同阶段只需要进行导航算法的适应性调整,理论上,脉冲星导航精度不随时间和航天器与地球的距离增加而降低,将是未来实现深空探测及星际飞行任务中无缝导航与精密控制最为有效的途径[4-6].
为验证脉冲星导航相关技术,中国空间技术研究院开展了脉冲星导航专用试验卫星(XPNAV-1,以下简称为脉冲星导航试验卫星)空间飞行试验工作.期望通过长时间累积探测建立试验型数据库,并对脉冲星导航技术体制进行验证.
脉冲星导航试验卫星由有效载荷和卫星平台组成,采用一体化综合电子设计,将星务、控制运算、测控、GNSS导航、电源控制集成于综合电子组件.卫星采用整星零动量三轴稳定姿态控制方式,进行观测时,脉冲星整体指向目标脉冲星,指向控制精度优于2′.
脉冲星导航试验卫星搭载了两套不同体制的X射线探测器:一套为掠入射聚焦型探测器(silicon drift detector,SDD),另一套为探测面积为1 200 cm2的微通道板探测器.其中前者使用了集光面积为30 cm2的4层嵌套Wolter-Ⅰ型聚焦系统,将视场为15′的X射线光子聚焦到一块硅漂移探测器上.掠入射聚焦型SDD工作在0.5~10 keV能谱范围内,其时间分辨率为1.5 μs.微通道板探测器通过准直器将视场限定为2°,工作能谱为1~10 keV.
为进行脉冲星导航试验卫星在轨标定,选择Crab脉冲星(PSR B0531+21)[7-8]作为标准源.该脉冲星是最明亮的空间X射线源之一,对其观测与研究最为详尽,同时也被认为是脉冲星导航最重要的观测目标之一[9].本文将介绍掠入射聚焦型SDD对Crab的观测模式,并提供基于第一手观测数据的分析结果.
1 观测任务
北京时间2016年11月10日,脉冲星导航试验卫星由长征十一号火箭发射升空,成功进入高度500 km,倾角97.4°,降交点地方时为6:00 am的太阳同步轨道.经过6 d的卫星平台测试和有效载荷功能在轨测试,正式进入科学任务测试阶段.
本文使用的科学数据,来自于由北京时间2016-11-19至2017-2-28(MJD 57709至MJD 57872),使用掠入射聚焦型SDD探测器对Crab脉冲星进行了162次观测任务.观测时,卫星避开南大西洋异常区(SSA)[10],且目标脉冲星与太阳、月球之间的夹角不小于45°,以防止外界环境对观测结果造成影响.结合轨道与南大西洋异常区约束条件,每次观测时间长度约为50 min,总观测时长为464 543 s,有效光子总数5 824 511个,统计得到平均流量为12.538 15 ph/s.该时间段内观测流量如图1所示.
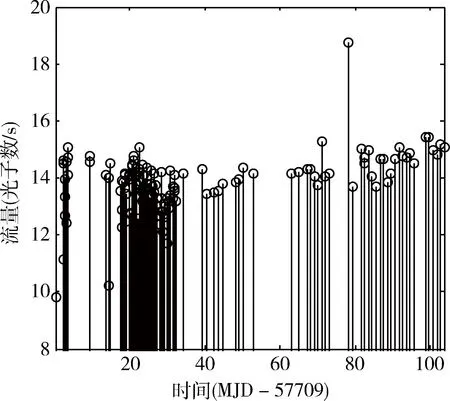
图1 MJD 57709 至 MJD 57872期间PSR B0531+21观测流量Fig.1 Measure PSR B0531+21 photon flux between MJD 57709 and MJD 57872
脉冲星导航试验卫星对PSR B0531+21的观测可以分为两个阶段:2016-12-28前,日均对PSR B0531+21进行6次观测;此后,为执行其他观测任务,对PSR B0531+21的日均观测次数下降到1次左右.为更详细地展示每段观测光子流量,MJD 57809至MJD 57812对PSR B0531+21共计4段观测流量的统计如图2所示,可知接收到的光子流量基本保持稳定.
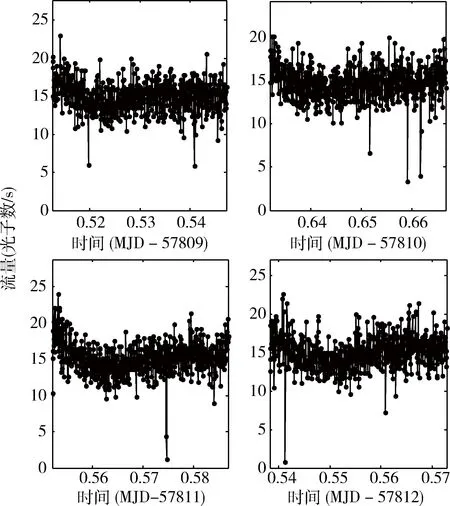
图2 4段典型 B0531+21观测流量Fig.2 PSR B0531+21 flux of four observations
2 轮廓折叠
利用掠入射聚焦型SDD接收到的光子到达时间与能量信息,地面支持团队利用自行开发的地面系统进行科学数据分析工作.为进行后续操作,所有光子到达时间根据文献[11-12]描述的延时模型被统一转换到太阳系质心坐标系下进行分析.此外,使用Jodrell Bank天文台利用Crab射电观测数据得到的脉冲频率(F0)及其一、二阶导数(F1、F2)作为脉冲星自转模型计算初始值[13],对各段观测时刻的脉冲频率进行外推,以获得各段观测数据的折叠轮廓.
表1 初始自转模型参数Tab.1 Ephemerides parameters prefit

(1)

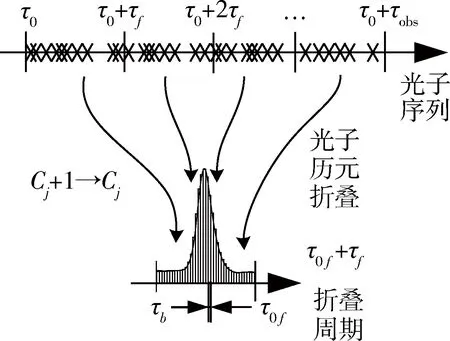
图3 光子历元折叠过程示意图Fig.3 Method of profile folding
利用上述方法,对162次观测任务的数据逐段进行轮廓折叠.与图2对应的4段观测数据获得的折叠轮廓如图4所示.各段轮廓的相位差异体现了脉冲相位随时间的变化过程.通过比较折叠轮廓与根据初始星历参数推算的标准轮廓h(φ)[16]的相位延迟,可以对包括星历、脉冲星位置在内的各项参数进行精化修正.

图4 4段典型 B0531+21观测数据得到的轮廓Fig.4 PSR B0531+21 folding profile based on four observations
3 相位延迟与脉冲到达时间残差估计
为进行相位延迟估计,选用了互相关估计方法,通过计算折叠轮廓与标准轮廓的互相关峰,计算二者的相位差异[4, 17].其中,离散条件下的互相关函数为:
(2)

(3)
相位延迟φ实际上就是折叠轮廓相对于标准轮廓向坐标轴左边偏移的相位.相位延迟应使式(2)表示的互相关函数RD(φ)达到最大值.不妨记折叠周期的起点为观测周期的起点,那么初始相位的估值为
(4)
文献[17]证明了式(4)对初始相位的估计是无偏的,且当τobs≫0与Nb→∞时,估计方差为
(5)
其中,α、β分别代表脉冲光子流量与非脉冲光子流量[4].
为求解式(4),可以在时域内对RD(φ)的自变量进行搜索,但效率更高的方法是频域的方法.式(4)的互相关函数可以用离散傅立叶变换的方法来计算,如下所示:
(6)

(7)
通过相位延迟,易知脉冲到达时间残差为
(8)
根据162段观测数据,绘制了从MJD 57709到MJD 57872时间段内的脉冲到达时间残差变化图,如图5(a)所示,其中整周模糊度已补偿.104μs量级的到达时间残差的出现有两个原因.首先是为推算标准轮廓,假定了一个初始脉冲相位φ0,其次是公开脉冲星参数存在一定的误差.通过数据拟合可以对这些参数进行拟合.
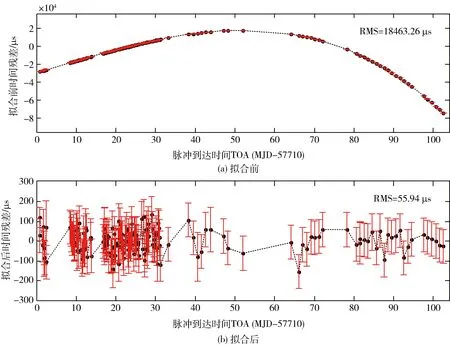
图5 脉冲星参数改正前后的脉冲到达时间残差比较Fig.5 Time residual pre and pose fit
4 脉冲星参数拟合
为改正脉冲星参数,采用最小二乘法对脉冲星参数进行估计.根据延时模型与脉冲星自转模型各项参数与脉冲到达时间的关系,使各项到达时间残差的平方和最小.

(9)
其中,α表示脉冲星赤经,δ表示脉冲星赤纬,是除脉冲星自转模型参数外,对时间残差最大的参数.计算时假设其他参数是已知的;把观测信息集中于以上6项参数估计会使其预测精度有所偏高,但由于这6项参数的观测度远高于其他参数,所以不会带来的量级上的影响.
利用高斯-牛顿非线性最小二乘法对式(9)进行求解,计算过程中使用的加权系数根据文献[17]给出的相位延迟估计精度推算得到.改正后的拟合脉冲星参数如表2所示.
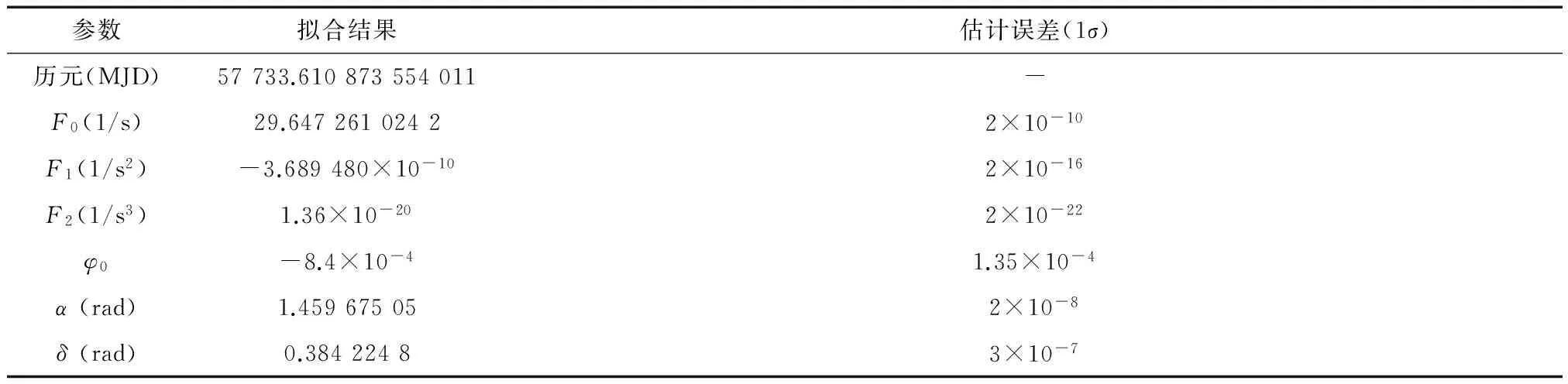
表2 PSR B0531+21改正参数Tab.2 PSR B0531+21 ephemerides correction parameters
利用表2给出的改正脉冲星参数,重新计算162次观测任务对应的到达时间残差,其结果如图5(b)所示.其中,黑色圆点表示计算残差值,单位为μs;红色Ⅰ形标志表示时间残差估计精度.相比于图5(a),时间残差明显减小,其方差缩小到55.94 μs.
进一步使用改正后的脉冲星参数,对162次观测任务所获得的光子到达时间记录,统一进行了轮廓折叠,其结果如图6所示.
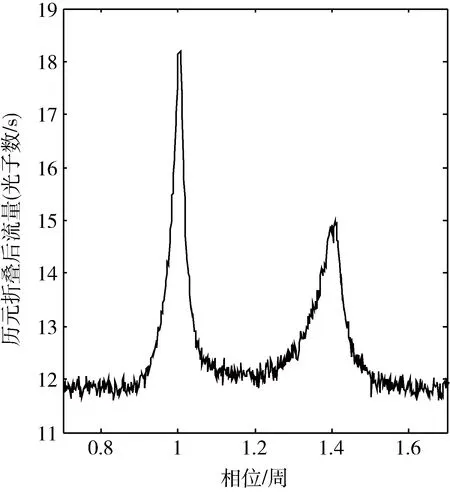
图6 利用全部光子获得的折叠轮廓Fig.6 Folding profile with all the photons
比较图6与图4,可知利用全部光子获得的折叠轮廓噪声明显小于仅使用一段观测数据所得到的折叠轮廓.此外,利用分布在163天之中的光子得到的折叠轮廓与标准轮廓的互相关值达到了99.995%,保证脉冲轮廓没有出现明显失真,也说明脉冲星参数拟合结果的正确性.
5 结 论
本文针对脉冲星导航试验卫星在4个月的空间飞行试验,利用掠入射聚焦型SDD获得PSR B0531+21 辐射的X射线光子观测数据进行初步分析,主要成果和结论总结如下:
介绍脉冲星观测数据的处理方法以及脉冲星参数的拟合过程,并根据所获得的科学观测数据计算PSR B0531+21自转模型参数与角位置参数.为验证参数估计的准确性,利用更新后的参数对到达时间残差进行评估,得到到达时间残差的均方根为55.94 μs.利用更新后的脉冲星参数对162次观测数据进行的轮廓折叠也表明,脉冲星参数拟合结果能够保证长时间的轮廓折叠计算.通过对PSR B0531+21的分析,回答了国产X射线探测器是否能够“看得见”脉冲星的问题.
利用脉冲星导航试验卫星搭载的两个X射线探测器获得的大量科学观测数据,脉冲星导航试验卫星地面支持团队将进一步构建试验型数据库,并对脉冲星导航技术体制进行深入验证.
[1] JOSEP S, ANDREU U, XAVIER V, et al. Feasibility study for a spacecraft navigation system relying on pulsar timing information-final report[R]. ESA, Ariadna Study, 2004.
[2] SHEIKH S, HANSON J ,GRAVEN P, et al. Spacecraft navigation and timing using X-ray pulsars[J]. Navigation, 2011, 58(2): 165-186.
[3] HUANG L W, LIN Q Q, ZHANG X Y, et al. Fast ambiguity resolution for pulsar-based navigation by means of hypothesis testing[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(1).
[4] AMIR E, JASON S. Navigation in space by X-ray pulsars[M]. New York: Springer, 2011.
[5] SHEIKH S I. The use of variable celestial X-ray sources for spacecraft navigation[D]. Dissertation, Department Aeronautics Engineering, Maryland University, College Park, Master Degree, 2005.
[6] HANSON J.E.Principles of X-ray navigation[D]. Dissertation, Department Aeronautics Astronautics, Stanford University, 1996.
[7] ATNFPULSAR CATALOGUE (2010)[EB/OL]. http://www.atnf.csiro.au/research/pulsar/psrcat/.
[8] MANCHESTER R N, HOBBS G B, TEOH A, et al. The Australia telescope national facility pulsar catalogue[J]. The Astronomical Journal, 2005, 129(4): 1993-2006.
[9] KIRSCH M G F, BRIEL U G, BURROWS D, et al. Crab: the standard X-ray candle with all (modern) X-ray satellites[C]//UV, X-Ray, and Gamma-Ray Space Instrumentation for Astronomy XIV. San Diego, 2005: 5898-589803.
[10] VETTE J I. The AE-8 trapped electron model environment[R]. NASA Technical Reports, NSSDC/WDC-A-R&S 91-24, 1991.
[11] EDWARDS R T, HOBBS G B, MANCHESTER R N. Tempo2, a new pulsar-timing package—Ⅰ. An overview[J]. Monthly Notices of the Royal Astronomical Society, 2006, 369(2): 655-672.
[12] EDWARDS R T, HOBBS G B, MANCHESTER R N. Tempo2, a new pulsar timing package—Ⅱ. The timing model and precision estimates[J]. Monthly Notices of the Royal Astronomical Society, 2006, 372(4): 1549-1574.
[13] JORDELL BANK. Observation Crab monthly ephemerisis[EB/OL].http://www.jb.man.ac.uk/pulsar/crab/all.gro/.
[14] EMADZADEH A A, SPEYER J L. X-ray pulsar-based relative navigation using epoch folding[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(4): 2317-2328.
[15] HUANG L,SHUAI P,ZHANG X. An X-ray pulsar TOA estimation method considering spacecraft orbit motion[C]//China Satellite Navigation Conference. XI’an, 2015, 342: 625-633.
[16] MPIFR EPN Pulsar Profiles Database[DB/OL]. http://www3.mpifr-zonn.mpg.de/old_mpifr/div/pulsar/data/.
[17] ZHANG X, SHUAI P, HUANG L. Phase tracking for pulsar navigation pulse Doppler effect[J]. Atca Astronautica, 2016, 12, 179-185.
X-Ray Pulsar Navigation Test Satellite Science Data Analysis
SHUAI Ping1, ZHANG Xinyuan1, HUANG Liangwei1, CHEN Shaolong1, DENG Loulou2,CHEN Jianwu2, SHI Yongqiang2, XUE Lijun3, DING Qiangqiang3
(1.ChinaAcademyofSpaceTechnology,Beijing100094,China;2.BeijingInstituteofControlEngineering,Beijing100190,China;3.ShenzhenAerospaceDongfanghongHTSatelliteLtd.Shenzhen,518054,China)
X-ray pulsar navigation test satellite is a dedicated test satellite developed by China. This satellite has obtained a great mount of science data during the flight of more than 4 months. In this paper, the first analysis result of science data that was collected by the focusing X-ray detector carried by the satellite in recently 4 months. The observation mode of this detector is introduced, the method of the science data analysis as well as the pulsar parameters correction are provided, the refined pulsar parameters are estimated, the performance of the detector in orbit is tested, and the question whether homemade X-ray detector is able to detect the pulsars is answered.
pulsar navigation; flight test; data analysis; X-ray detector; profile folding
金资助项目(61403391,61601463,11405265).
2017-03-20
V417.7
A
1674-1579(2017)02-0001-06
10.3969/j.issn.1674-1579.2017.02.001
帅 平(1971—),男,研究员/总师,研究方向为卫星导航与脉冲星导航系统技术;张新源(1984—),男,博士后,研究方向为脉冲星导航;黄良伟(1981—),男,高级工程师,研究方向为脉冲星导航;陈绍龙(1976—),男,高级工程师,研究方向为脉冲星导航;邓楼楼(1982—),男,高级工程师,研究方向为脉冲星探测器设计与测试;石永强(1988—),男,高级工程师,研究方向为脉冲星导航;陈建武(1985—),男,高级工程师,研究方向为脉冲星探测器设计与测试;薛立军(1978—),男,研究员,研究方向为卫星总体设计;丁强强(1984—),男,高级工程师,研究方向为卫星总体设计.
猜你喜欢
北京航空航天大学学报(2021年7期)2021-08-13
时代英语·高一(2019年5期)2019-09-03
电子制作(2019年12期)2019-07-16
发明与创新·大科技(2019年11期)2019-03-07
北京航空航天大学学报(2018年1期)2018-04-20
儿童故事画报·自然探秘(2017年2期)2017-09-26
百科知识(2017年3期)2017-03-17
太空探索(2016年12期)2016-07-18
大灰狼(2009年7期)2009-08-26
舒适广告(2008年9期)2008-09-22
