基于改进型滑模观测器PMSM转子位置估计
2017-05-02 12:14:07刘海财李光军李树胜
微特电机 2017年11期
刘海财,李光军,李树胜
(北京航空航天大学,北京 100191)
0 引 言
永磁同步电机(以下简称PMSM)具有功率因数高、效率高、损耗小等特点,因此应用广泛[1-4]。在PMSM矢量控制中,一般采用光电编码器、旋转变压器等检测转子位置,但是这会增加系统成本和体积,降低可靠性[5-6]。高精度的无传感器位置检测方法对解决上述问题意义重大。
基于滑模观测器的无传感器PMSM控制技术在工程中应用较多,受到国内外学者的关注。文献[7]以双曲正切函数为切换函数,通过锁相环获取转速和转子位置信息,省去了低通滤波器,但是实际中反电势中存在电机谐波信号,估计效果不理想。文献[8]设计出基于干扰相的滑模观测器,但是其以常数函数为切换函数,且滑模增益为固定设计值,故抖振问题难以改善。文献[9]和文献[10] 分别通过引入反电势和磁链方程扩展滑模观测器,再以设计速度自适应率的方式使反电势和磁链误差趋近于0,抑制了抖振,但是该方法算法较复杂。
本文提出一种基于改进滑模观测器的PMSM转子位置估计方法,以模糊控制调整滑模增益以抑制抖振,并采用自适应低通滤波器来减小高频噪声对反电势估计结果的影响,提高滑模观测器估计精度。通过仿真和实验,验证了该方法的有效性。
1 PMSM数学模型
PMSM的数学模型基于以下假设:定子绕组磁动势为正弦分布;磁路铁心的饱和及涡流忽略不。α-β坐标系下的表贴式PMSM电流和反电势方程[11]:
(1)

(2)
式中:iα,iβ为定子电流α,β轴分量;uα,uβ为定子电压α,β轴分量;eα,eβ为反电势α,β轴分量;Ls为定子电感;Rs为定子电阻;ψf为转子磁链;ωr为电机电气转速。
2 模糊滑模观测器设计
2.1 传统滑模观测器
滑模观测器电流估测方程如下[12-13]:
(3)

(4)
式中:k>0,k为滑模增益。

图1 传统滑模观测器结构图
在PMSM控制系统中,式(4)中理想的开关特性难以实现,时间上的延迟和空间上的滞后使得滑动模态呈抖动形式。为了减小抖振,下面提出模糊滑模观测器结构。
2.2 改进滑模观测器设计
模糊滑模观测器结构如图2所示。
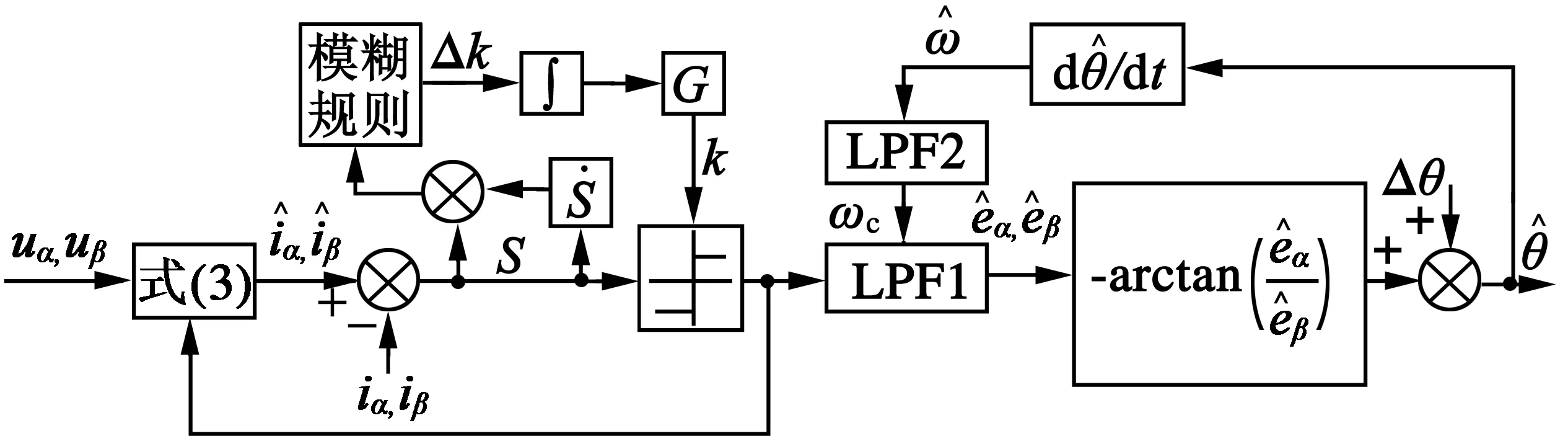
图2 改进滑模观测器结构图
(5)
式中:S为滑模面。
模糊控制的输入/输出的模糊集分别定义如下:


其中,NB为负大,NM为负中,ZO为零,PM为正中,PB为正大。模糊控制系统的输入/输出隶属函数如图3和图4所示,图5为模糊控制输入/输出关系。

图3 模糊输入的隶属函数
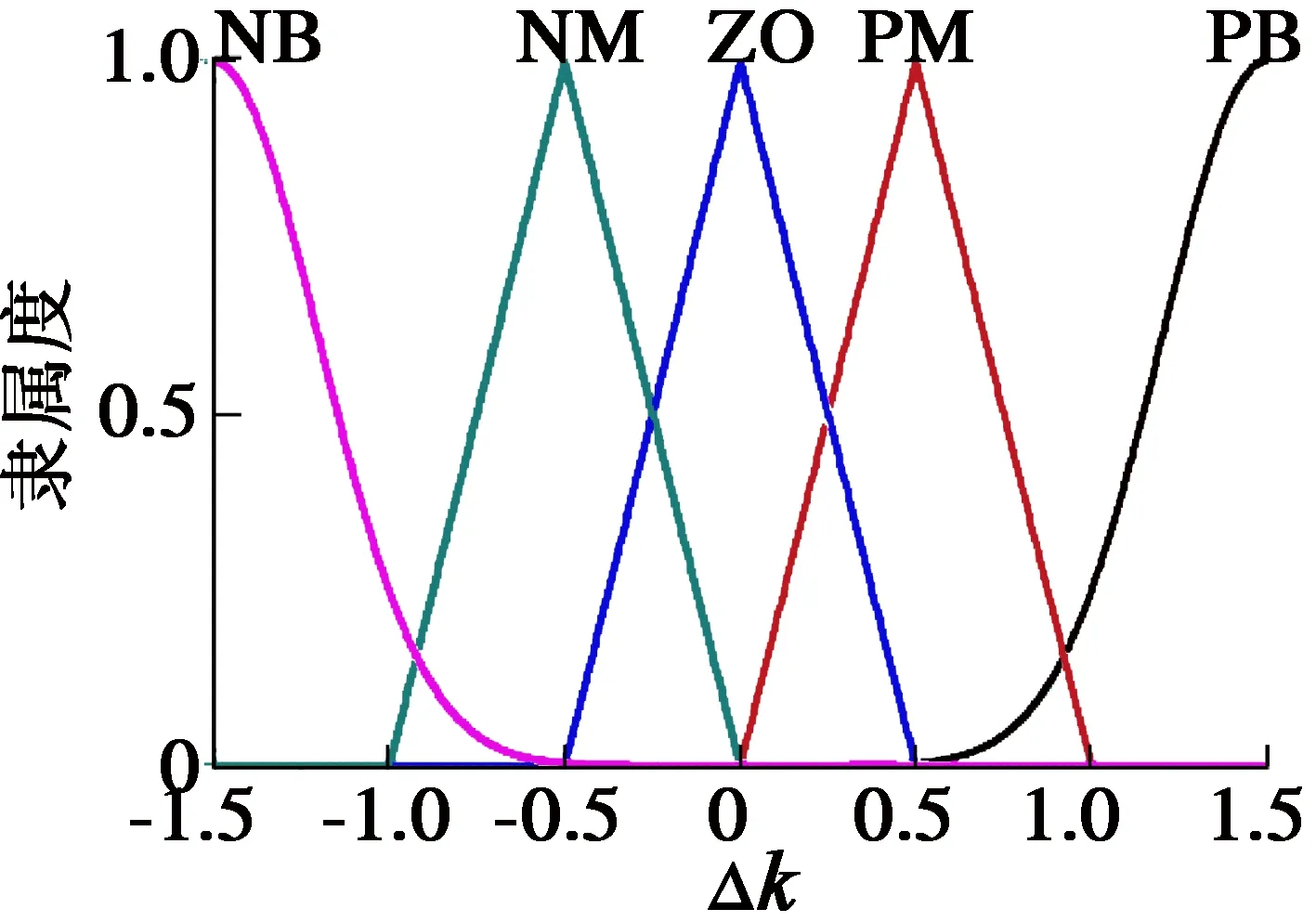
图4 模糊输出的隶属函数
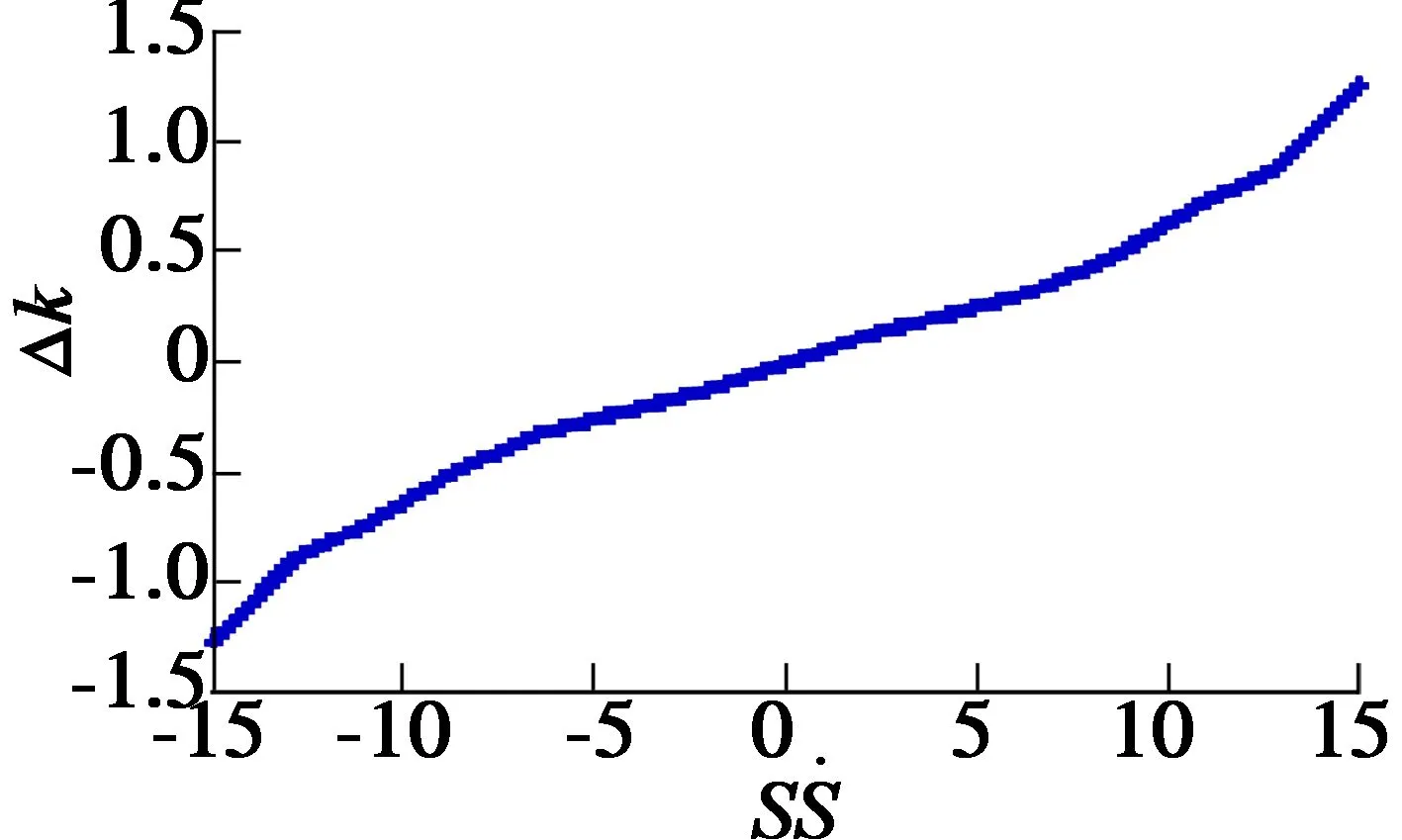
图5 模糊输入/输出关系
模糊规则设计如下:
利用积分的方法对k的上界估计:

(6)
式中:G为比例系数。
2.3 自适应低通滤波器设计
切换函数经过低通滤波得到估算反电势,方程如下:
(7)
式中:ωc为一阶低通截止频率。
文献[14]指出,截止频率过大ωc>ωe(ωe为电气角频率),滤波器对在ωe<ω<ωc区间的干扰信号抑制效果不理想;截止频率过小(ωc<ωe),则会衰减频率为ωe的控制信号,导致滤波后的反电势较小,转子位置估计不理想,故采用以电气角频率作为滤波器截止频率的方法。
对低通滤波器导致的相位延迟进行补偿,补偿角:
(8)
补偿后估算的转子位置和转速:
(9)
(10)
为了减小纯微分环节引入的噪声,需对估算转速低通滤波,结构框图如图2所示。
为了使系统稳定,下面应用李亚普诺夫稳定理论对系统的稳定性进行分析。
3 稳定性分析
取李亚普诺夫函数:
(11)
用式(3)减去式(1)得到电流误差观测方程:
(12)
由式(5)、式(11)、式(12),可得:
k(|sα|+|sβ|)
(13)
4 仿真和实验结果
4.1 仿真结果与分析
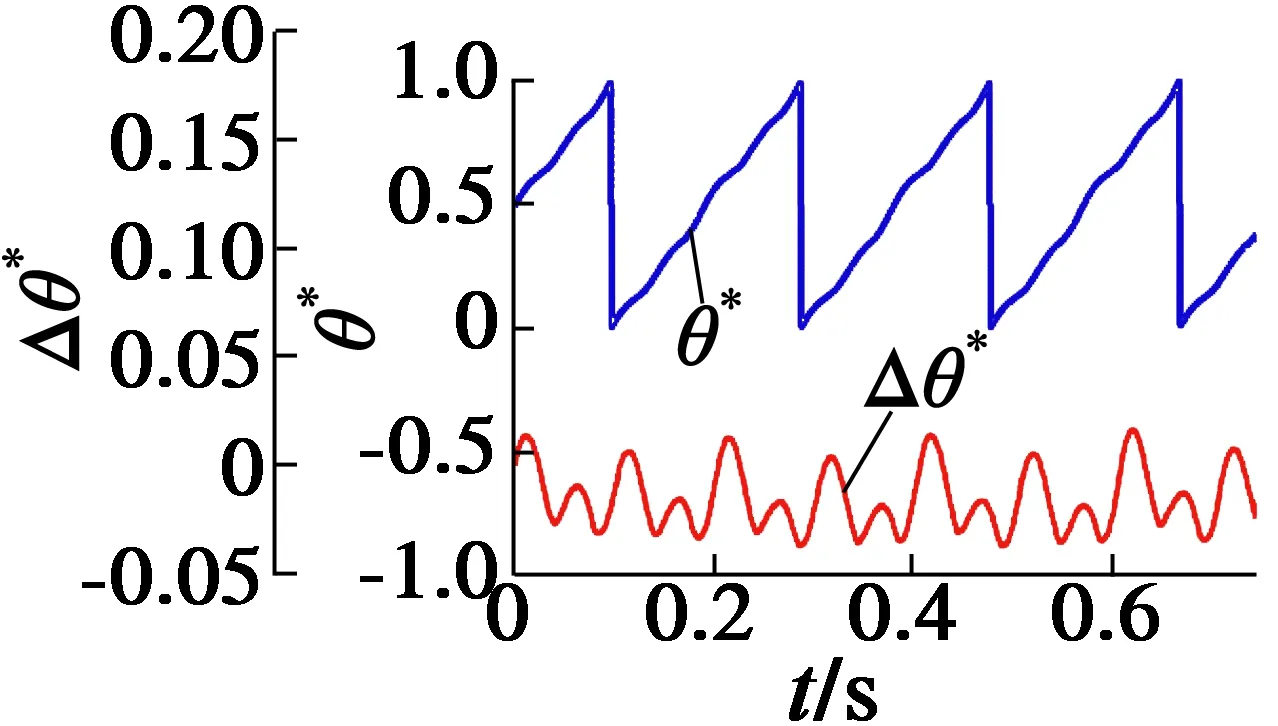
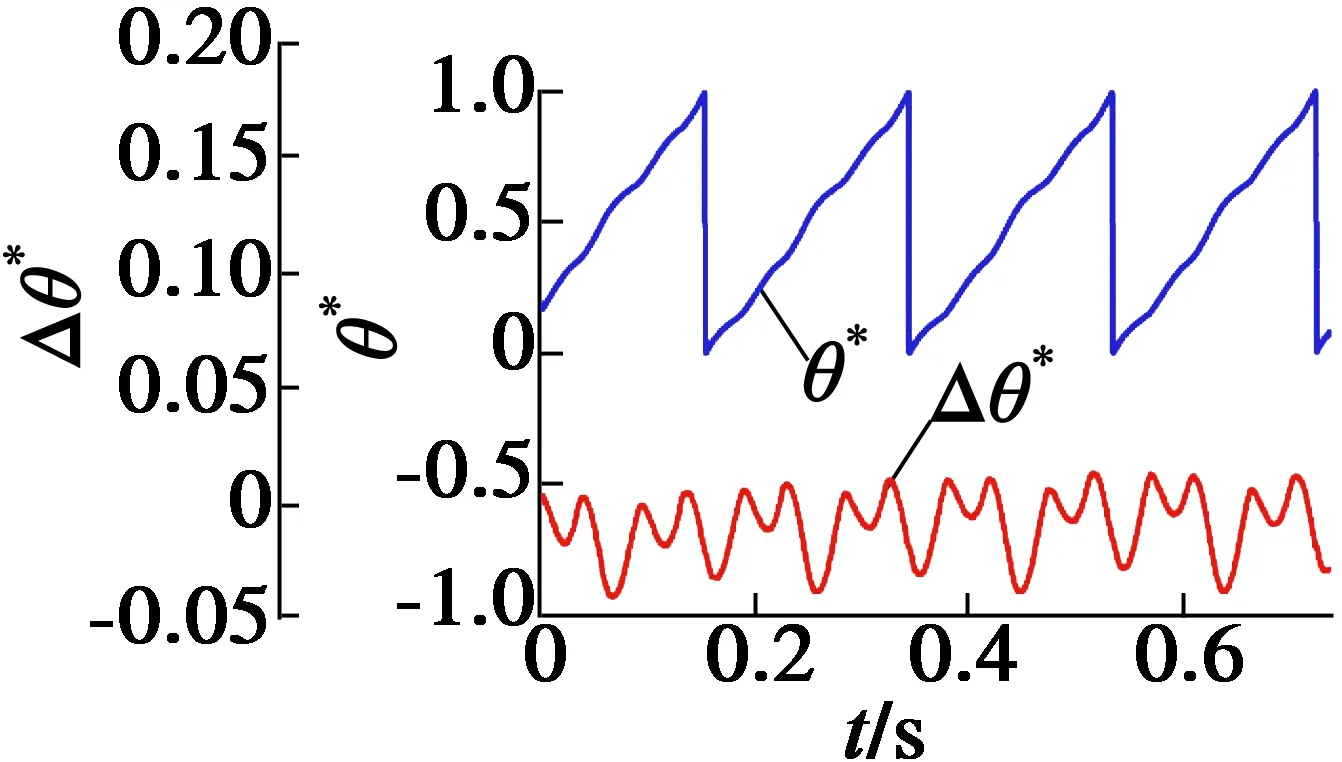
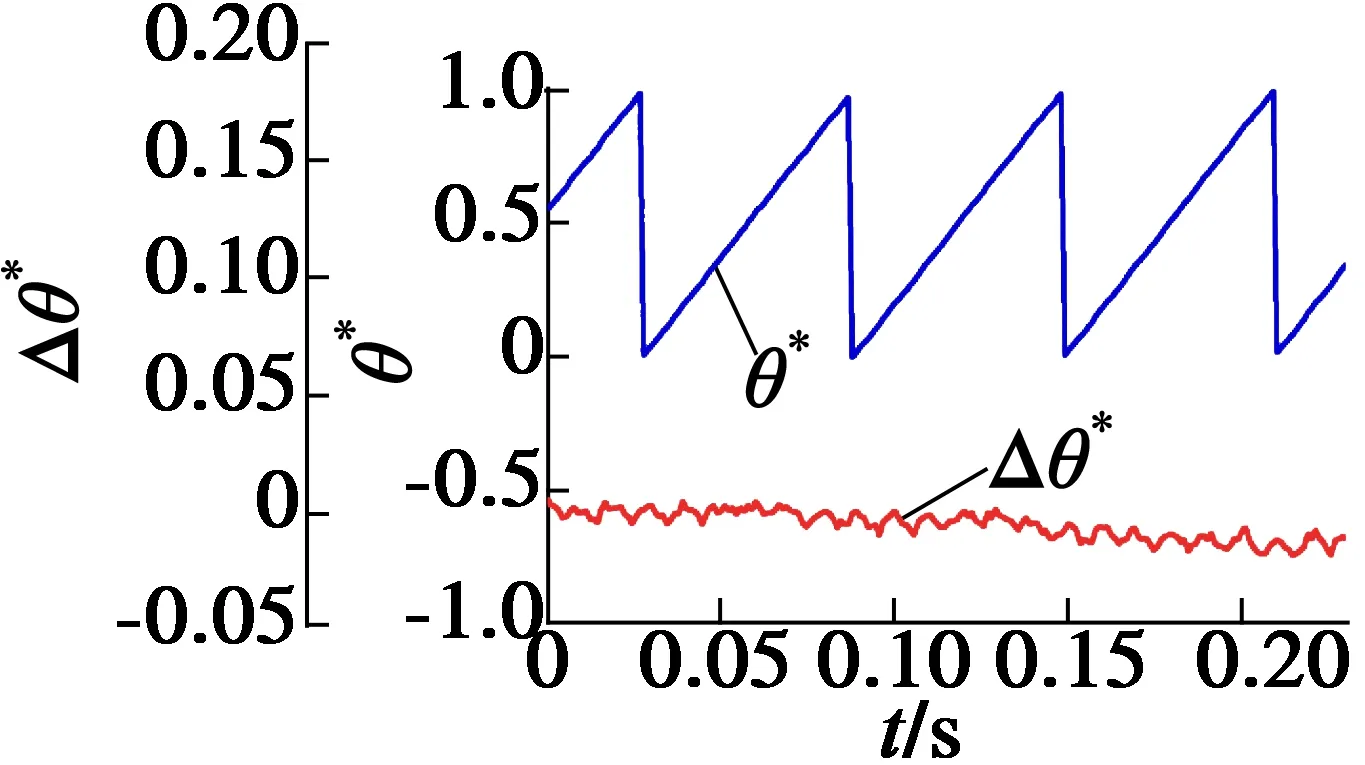
搭建如图6所示的MATLAB/Simulink仿真平台,参数如表1所示,给定300 r/min和1 000 r/min进行仿真实验,如图7、图8所示。θ和Δθ没有单位,是以2π rad基准值计算出的标幺值。
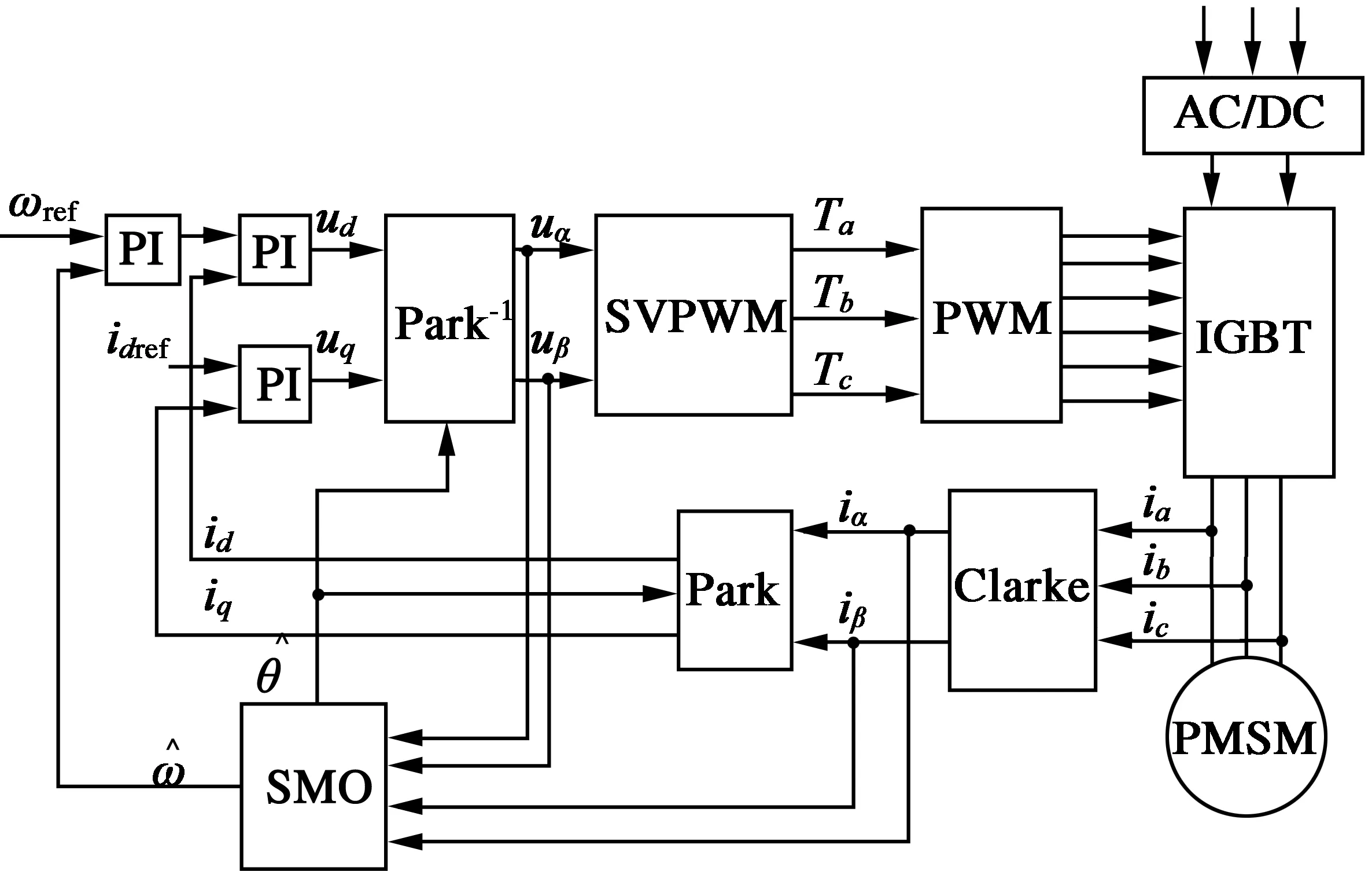
图6 基于模糊滑模观测器的PMSM矢量控制结构

表1 PMSM参数
(a) 传统滑模观测器控制
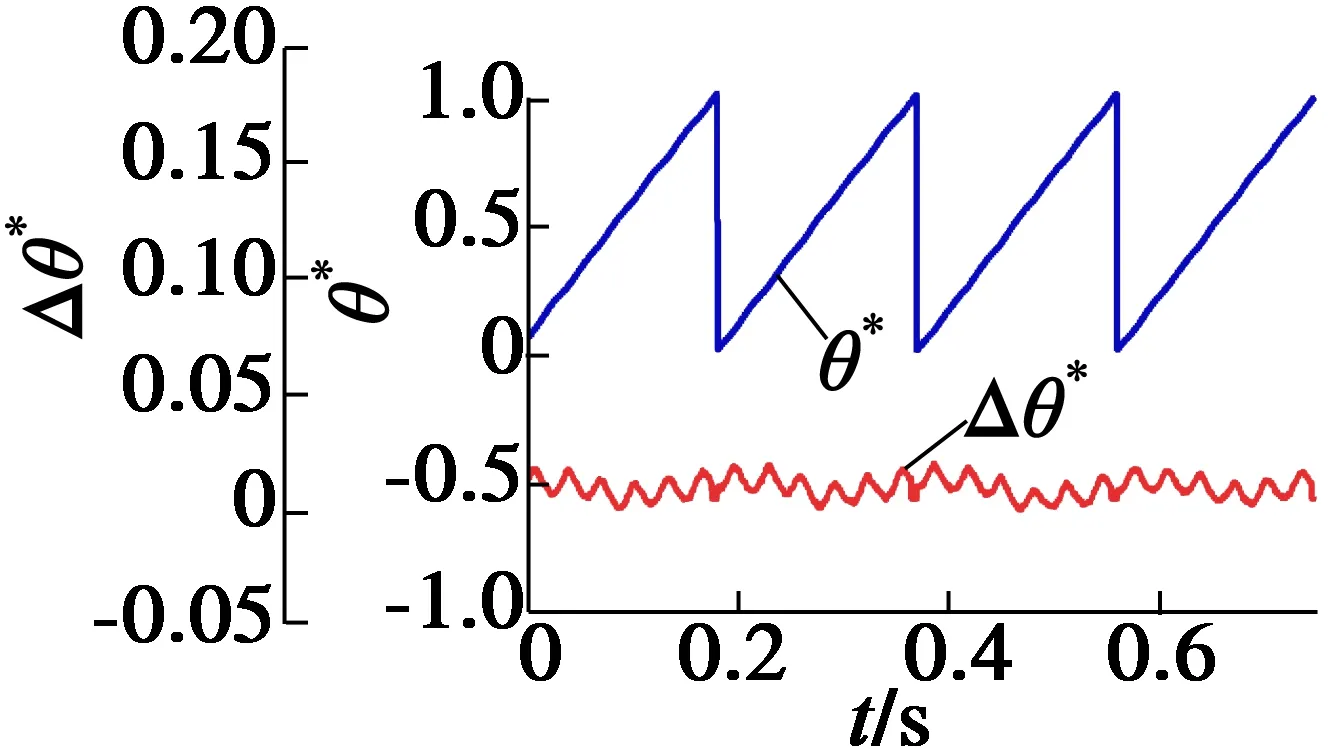
(b) 改进型滑模观测器控制
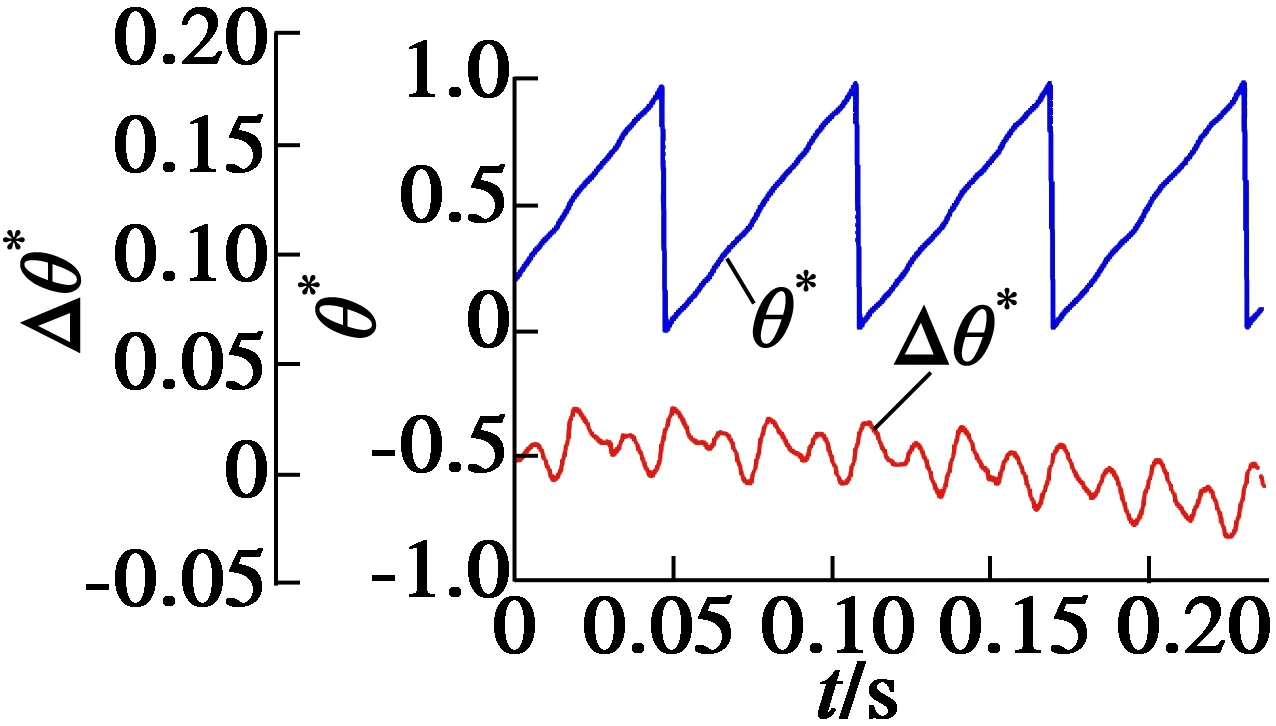
(a) 传统滑模观测器控制
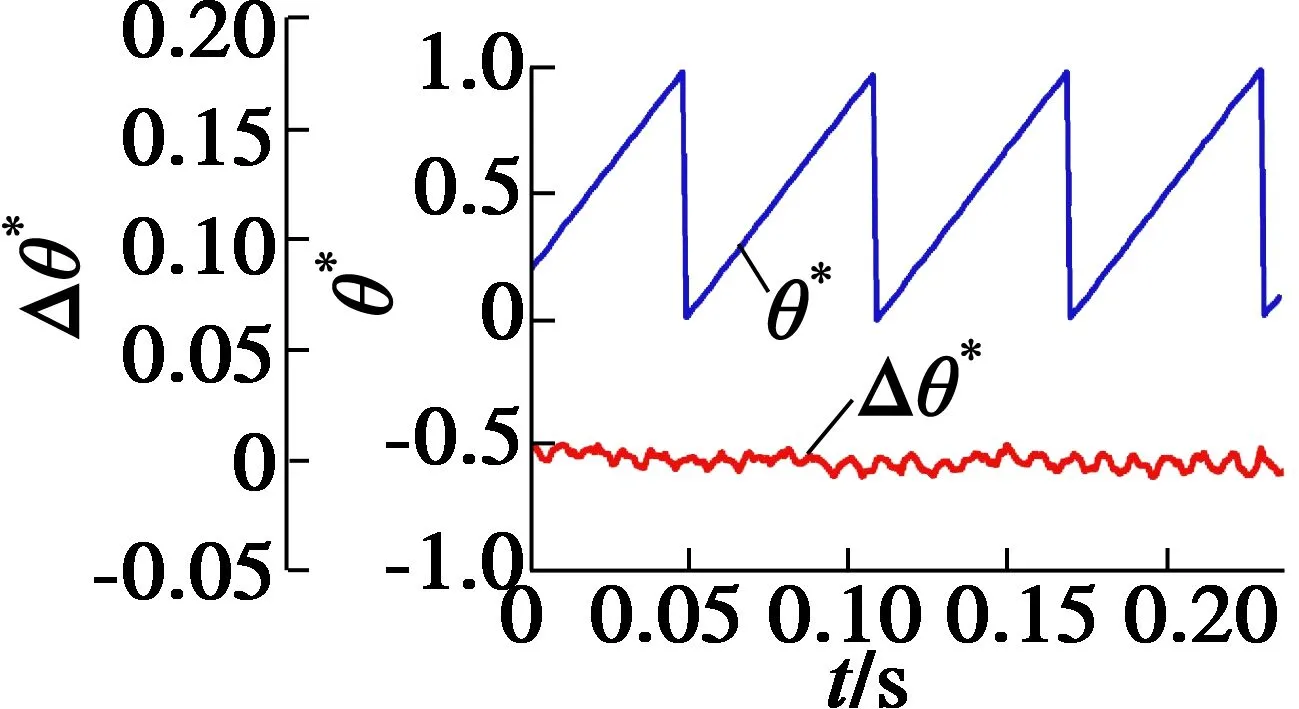
(b) 改进型滑模观测器控制
仿真实验误差结果如表2所示。
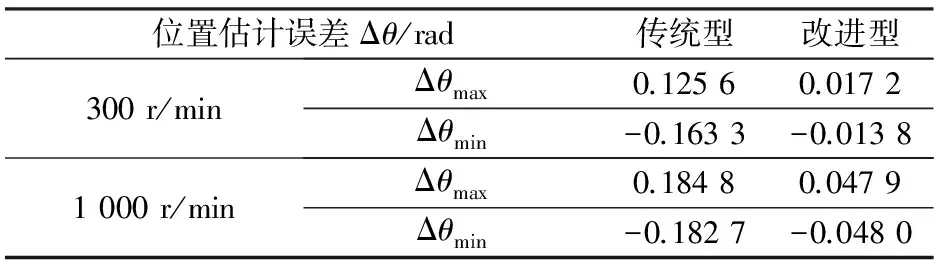
表2 仿真转子位置估计误差
从图7、图8和表2中可以看出,传统滑模观测器估计的转子位置具有明显的抖振,改进型滑模观测器利用模糊控制调节滑模增益,并采用自适应低通滤波器有效地减小了转子位置估计误差。
4.2 实验结果与分析
为了验证改进型滑模观测器的有效性,搭建如图9所示的实验系统。主控制器采用TI公司TMS320F28335系列DSP,输出PWM频率为10kHz,与上位机通过CAN总线通信,数据传输速率为1kHz。电机参数见表1,采用id=0的矢量控制策略。分别给定转速300r/min和1 000r/min,实验结果如图10和图11所示。

图9 PMSM控制系统
(a) 传统滑模观测器控制

(b) 改进型滑模观测器控制

(a) 传统滑模观测器控制
(b) 改进型滑模观测器控制
实验误差结果如表3所示。

表3 实验转子位置误差
从图10、图11和表3中可以看出,在给定转速300 r/min和1 000 r/min下,改进型滑模观测器估算的PMSM转子位置误差,与传统型滑模观测器估计结果相比,得到了明显的抑制。
5 结 语
改进型滑模观测器通过模糊控制在线调节滑模增益,使滑模增益较小且系统处于稳定状态,并通过自适应低通滤波器滤除估计反电势中的高频噪声,通过实验验证,该方法能够较好地跟踪PMSM的实际位置,且具有较高的精度。
[1] 张磊,高春侠.一种变增益宽速度范围的永磁同步电机无位置传感器控制[J].电机与控制学报,2015,19(8):36-40.
[2] 张洪帅,王平,韩邦成,等.基于模糊滑模观测器的磁悬浮高速永磁同步电机转子位置检测方法[J].电工技术学报,2014,29(7):147-153.
[3] CHEN Siyi,LUO Ying,PI Youguo.PMSM sensorless control with separate control strategies and smooth switch from low speed to high speed[J].ISA Transactions,2015,58(8):650-658.
[4] 苗文彬,赵烨,戴鹏等.永磁同步电机改进型滑模观测器无传感器控制[J].电气传动,2013,43(7):19-22.
[5] REN Jun-jie,LIU Yan-cheng,WANG Ning,et al.Sensorless control of ship propulsion interior permanent magnet synchronous motor based on a new sliding mode observer[J].ISA Transactions,2015,54(2):15-26.
[6] 邱忠才,郭冀岭,肖建.基于Sigmoid函数的PMSM滑模变结构位置速度观测器[J].电气传动,2014,44(3):3-7.
[7] 刘艳莉,张烨,吕继考,等.PMSM改进型滑模观测器无传感器参数辨识[J].电力系统及自动化学报,2014,26(4):30-34.
[8] AYDOGMUS O,SUNTER S.Implementation of EKF based sensorless drive system using vector controlled PMSM fed by a matrix converter[J].International Journal of Electrical Power & Energy Systems,2012,43(1):736-743.
[9] 李冉,赵光宙,徐绍娟.基于扩展滑模观测器的永磁同步电动机无传感器控制[J].电工技术学报,2012,27(3):79-85.
[10] 苏健勇,杨贵杰,李铁才.PMSM扩展状态滑模观测器及转子位置和速度估算[J].电机与控制学报,2008,12(5):524-533.
[11] KRISHNAN R.Permanent magnet synchronous and brushless DC motor drives[M].Florida:CRC Press,2010:227-230.
[12] SONG Xinda,FANG Jiancheng,HAN Bangcheng,et al.Adaptive compensation method for high-speed surface PMSM sensorless drives of EMF-based position estimation error[J].IEEE Transactions on power electronics,2016,2,31(2):1438-1449.
[13] QIAO Z W,SHI T N,WANG Y D.New sliding-mode observer for position sensorless control of permanent-magnet synchronous motor[J].IEEE Trans Ind Electron ,2013,60(2):710-719.
[14] 刘文军,周龙,唐西胜,等.基于改进型滑模观测器的飞轮储能系统控制方法[J].中国电机工程学报,2014,34(1):71-78.
猜你喜欢
一重技术(2021年5期)2022-01-18 05:42:08
防爆电机(2020年4期)2020-12-14 03:11:02
测控技术(2018年4期)2018-11-25 09:47:14
电气电子教学学报(2018年3期)2018-10-11 03:19:20
机电信息(2018年6期)2018-03-05 03:44:16
电测与仪表(2015年8期)2015-04-09 11:49:50
电机与控制应用(2015年2期)2015-03-01 03:49:22
电测与仪表(2014年13期)2014-04-04 12:04:16
电子测试(2013年19期)2013-09-13 12:30:02
新高考·高一物理(2012年5期)2012-04-29 20:27:57