
基于STC单片机的角度控制*
2017-04-26 10:42宁红英李学平刘芳园
网络安全与数据管理 2017年7期
宁红英,李学平,卢 秀,刘芳园
(西安理工大学 信息技术与装备工程学院,陕西 西安 710048)
基于STC单片机的角度控制*
宁红英,李学平,卢 秀,刘芳园
(西安理工大学 信息技术与装备工程学院,陕西 西安 710048)
利用STC12系列单片机作为控制核心,减速电机作为执行机构,以单圈电位器作为检测元件,在有限范围内实现了角度的精确控制。经过实验测试,在0°~235°的控制范围内,最大误差控制在±1°,保证了控制精度和控制速率;经过实际使用验证了该方案安全、可靠。
控制器;PWM;减速直流电机;单圈电位器
0 引言
现代工业控制中控制对象的多样性及复杂性,控制系统中各环节的控制精度、控制速度的要求不断提高,对控制系统的性能提出了更高的要求。随着计算机技术的不断发展,信号处理精度已经普遍能够满足要求,所以衡量系统性能的优劣取决于系统中的检测环节及执行机构。执行机构从所用能源进行分类,可分为电动执行机构、气动执行机构以及液压执行机构[1]。控制系统中,角度对应执行机构的典型输出,本文对电动执行机构进行分析,以通用STC系列单片机为控制核心,以单圈电位器作为检测元件,采用PID算法,对执行机构减速电机进行控制,实现角度的精确控制[2-4]。
1 控制系统设计思想
控制系统结构如图1所示,系统结构为典型的单值闭环控制系统,主要由单片机主控系统、驱动系统、执行机构、角度检测及显示等环节构成。
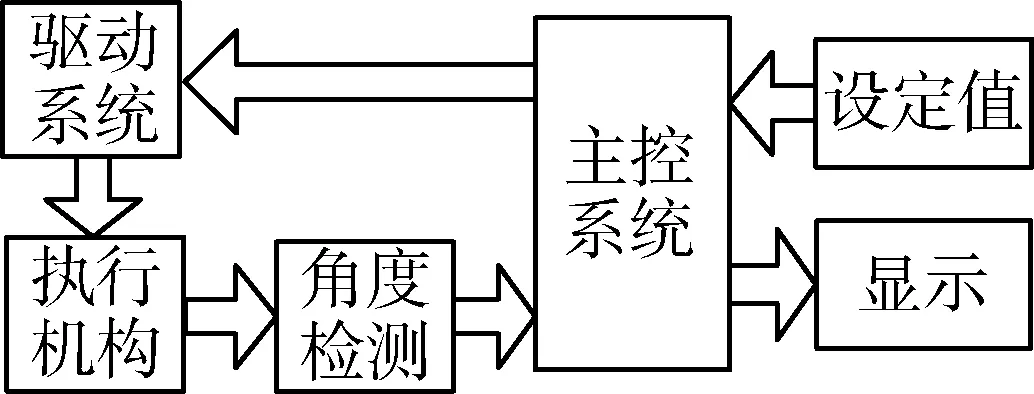
图1 控制系统结构框图
主控系统主要完成信息处理、电机驱动信号输出、驱动显示器件等功能,采用主控芯片STC12C5A60S2单片机,此芯片具有高速、低功耗、超强抗干扰等性能[5]。驱动系统主要根据主控系统的输出信号进行功率放大,驱动后级执行机构,此环节采用专用驱动模块L298N来完成。执行机构采用减速电机,完成被控对象角度的定位。角度检测采用变阻式角度传感器实现,主要完成减速电机转动角度的准确判断,并将角度转换成电压输出,角度调整范围为0~270°,输出电压在一定范围内与角度线性对应,其输出接入到主控系统的A/D转换接口。显示模块采用LCD1602液晶显示器件,主要完成设定值以及实时测量角度的显示。
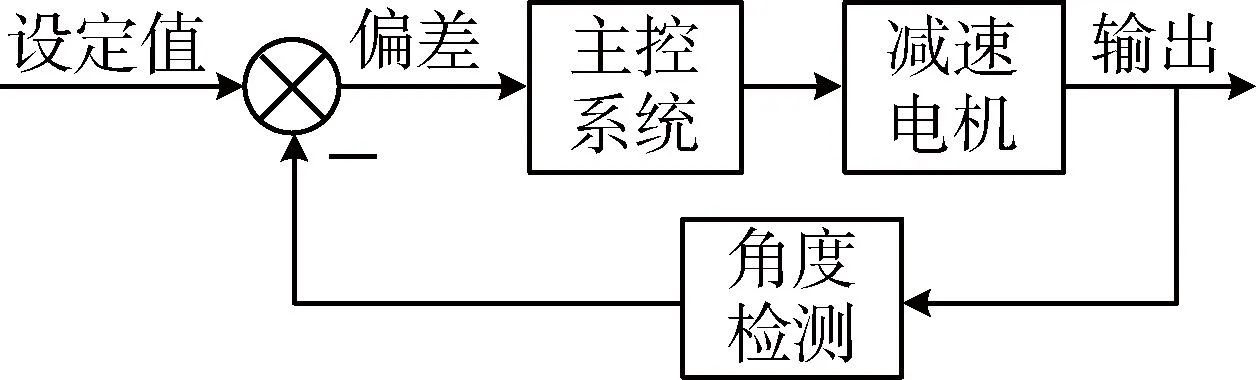
图2 负反馈控制结构
系统工作过程形成典型的负反馈控制系统,结构如图2所示。角度传感器与执行机构中的减速电机同轴相连,当减速电机旋转时,角度传感器随之一起旋转,将减速电机的旋转角度转换成电压输出,作为反馈信号,送入到主控系统的A/D转换入口。主控系统接收到此信号之后,与设定值进行比较,得到偏差信号,控制系统一方面根据两者偏差调整PWM输出占空比,控制减速电机的转速,当偏差较大时,减速电机快速转动,随着偏差的不断减小,电机旋转速度趋于平缓,既保证了系统调整速度,又可以减小执行机构定位时旋转角度的超调;另一方面,主控系统根据偏差信号的状态,调整减速电机的旋转方向,最后使系统稳定在设定值上。
2 实现方案
2.1 硬件电路设计
(1)电机驱动电路
控制信号由STC12C5A16S2单片机输出。由于单片机的直流输出电流非常微弱,不能直接用来驱动电机,必须将输出的控制信号输入到电机驱动电路,进行功率放大,再驱动电机工作。本文中采用驱动芯片L298N构造驱动电路,如图3所示。驱动芯片中ENA、ENB为使能控制端,控制电机的停转,高电平有效;根据设计结构,将单片机的PWM输出端接驱动芯片的使能端ENA,单片机输出端P1.4、P1.5接驱动芯片的输入端,控制电机的正转、反转、停止等状态。
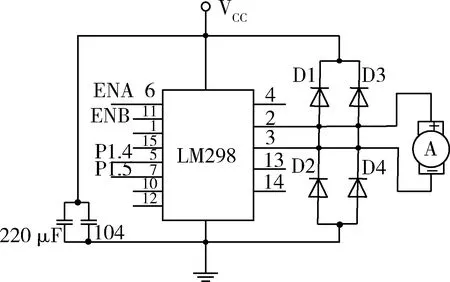
图3 电机驱动电路
(2)电机旋转角度检测
对于电机角度检测,采用高精度的单圈电位器。减速直流电机转轴与电位器同轴相连,电机旋转带动传感器旋转轴的旋转,传感器产生一个与角度依次对应的输出电压,此电压接入单片机A/D采样端口,作为电机的位置反馈信号,软件处理过程中对所采集的信号进行非线性修正,以提高控制精度。
(3)人机接口
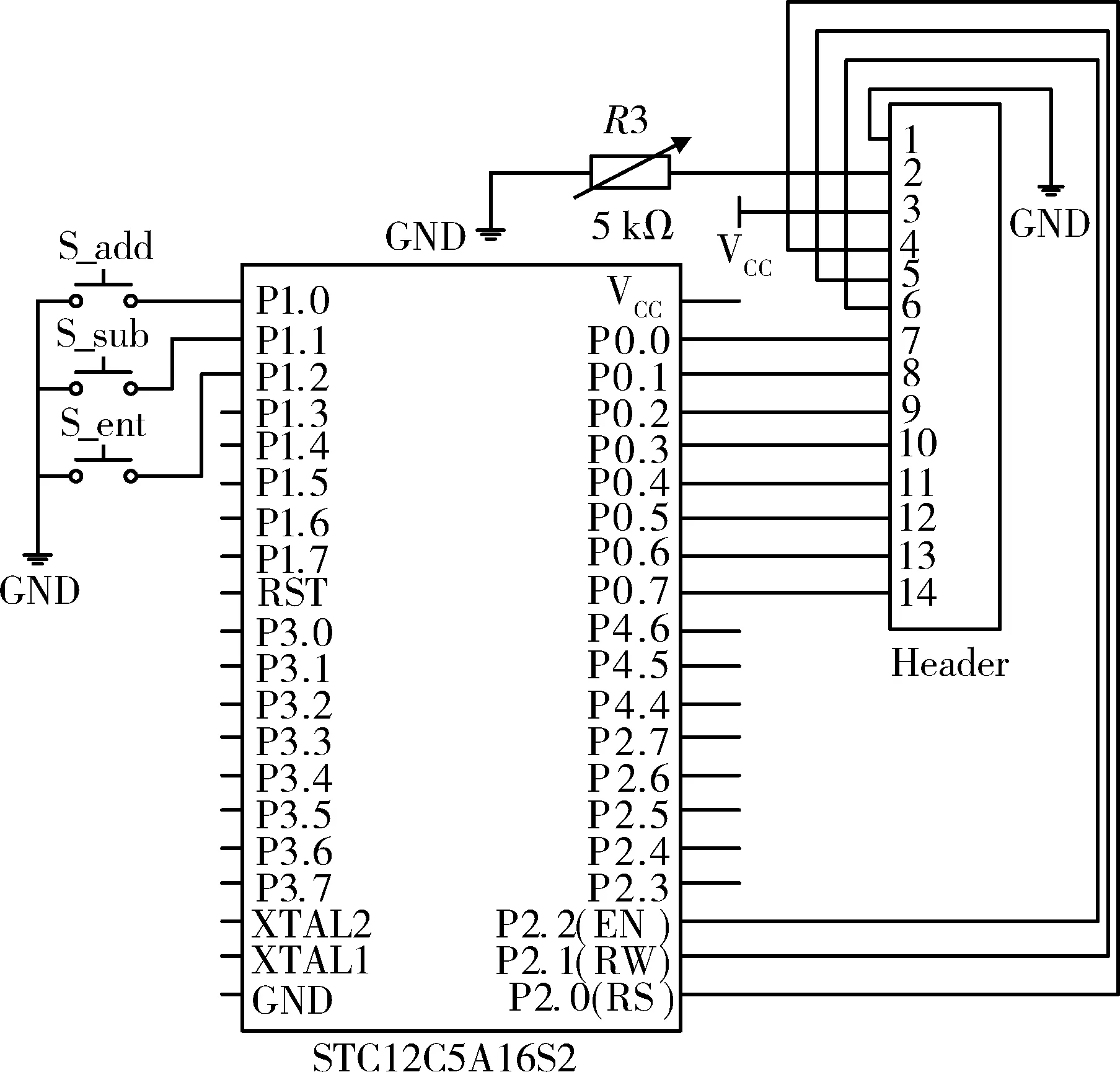
图4 人机接口资源分配
人机接口资源分配如图4所示。本系统中,人机接口主要涉及两个问题,一是参考值的设定,另一个是参考值以及反馈值的实时显示。参数设定采用键盘输入,设置3个按键,对角度进行“加”、“减”、“确定”功能设定;数据显示采用LCD1602液晶显示器件,完成对参考值以及反馈值的实时显示。
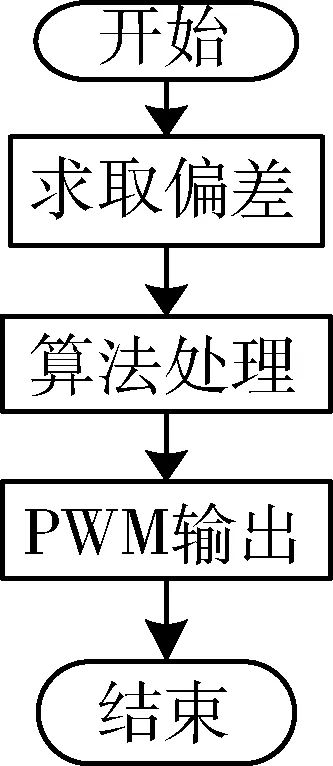
图5 电机驱动软件设计流程
2.2 主要模块软件设计
(1)减速电机驱动
电机驱动软件设计流程如图5所示。通过将角度传感器输出信号与设定值进行比较,获得一个偏差信号,首先根据偏差信号的状态确定电机的运行状态,当偏差信号小于0时,控制电机正转;偏差信号大于0时,电机反转;偏差信号等于0时,电机固定在设定位置。其次在控制算法中对此偏差信号进行PID运算,控制PWM输出占空比,调整电机转速[6],实现速度的两级控制,以提高整机的调整效率,减小控制过程中角度的超调量。
(2)A/D转换
STC12C5A60S2系列单片机自带A/D转换接口,分布在P1口,图6为单片器A/D转换流程图。图6(a)为A/D转换主流程图,图6(b)为ADC数据处理过程。数据处理采用求取平均值的方法[7],数据处理过程中多次采样,剔除采样结果中最大及最小值,再求取平均值,以保证采样结果的精确度。

图6 A/D转换流程图
3 测量数据及分析
系统搭建并调试完成之后,在0°~235°范围内,每隔5°改变一次设定值,对控制结果进行测试,测试误差在±1°范围内;在数据测试过程中,每改变一次设定值,系统能够非常迅速地达到新的平衡状态且超调量较小,误差曲线如图7所示。

图7 误差分析曲线
4 结论
本文主要论述了控制系统中对过程变量角度的控制,依次映射执行机构的控制过程。系统采用单片机作为主控芯片,结构紧凑、体积小、集成度高、速度快、抗干扰能力强、故障率低、操作方便;软件部分采用结构化设计,只要对程序参数稍加改动就可以很快适应新的环境,系统易维护,集成了数据采集、数据处理、控制电机运行状态等功能,同时也体现了经典控制理论在控制过程中良好的控制效果。经过实际测试,角度在0°~235°时,最大误差可控制在±1°范围。
[1] 李开元,刘洪运,王卫东,等.基于STC单片机的温控热计费采暖阀门的设计[J].电子技术应用,2011,37(5):56-59,63.
[2] 郭天祥.51 单片机C语言教程 [M]. 北京 : 电子工业出版社 ,2009.
[3] 赵新.基于PID算法的PWM单片机的帆板控制[J].信息与电脑,2016(7):33-34.
[4] 赫建立,朱龙英,成磊,等.串联机器人轨迹跟踪控制模糊自适应PID算法的误差修正[J].电子技术应用,2015,41(1):60-63,67.
[5] 余松科,方方,李婷,等.PWM调速对直流电机运行特性的影响研究[J].微型机与应用,2015,34(13):28-30,34.
[6] 史敬灼,刘玉.超声电机简单专家PID速度控制[J].中国电机工程学报,2013,33(36):120-125.
[7] 刘春辉,张颖超,许超,等.自动气象站数据采集器的设计[J].电子技术应用,2014,40(6):36-38.
The angular control based on STC signal-chip microcomputer
Ning Hongying,Li Xueping,Lu Xiu,Liu Fangyuan
(School of Information Technology and Equipment Engineering,Xi’an University of Technology, Xi’an 710048, China)
This paper presents the system to control the angular accurately in a limited range, which utilizes the STC12 serial signal-chip microcomputer as the core of the controller, the DC geared motor as the actuator, and the single-turn potentiometer as the measuring element. Through the experiment texting, the system makes the maximum error within the scope of ±1°between 0°and 235°to ensure control precision and control rate,and practical application confirms the projectis safe and reliable.
controller;PWM;DC geared motor;single-turn potentiometer
西安理工大学教学研究重点项目(xjy1670)
TP215
A
10.19358/j.issn.1674- 7720.2017.07.010
宁红英,李学平,卢秀,等.基于STC单片机的角度控制[J].微型机与应用,2017,36(7):32-34,38.
2016-12-01)
宁红英(1982-),通信作者,女,硕士,讲师,主要研究方向:检测技术与自动装置、大功率器件功率损耗。E-mail:ninghongying@126.com。
李学平(1980-),男,硕士,副教授,主要研究方向:无线通信。
卢秀(1971-),女,硕士,副教授,主要研究方向:电气自动化。
猜你喜欢
天然气与石油(2022年4期)2022-09-21
湖北农机化(2021年7期)2021-12-07
学生天地(2020年6期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
系统医学(2016年8期)2016-02-20
自动化仪表(2015年5期)2015-06-15
汽车维修与保养(2015年6期)2015-04-17
质量技术监督研究(2015年1期)2015-04-09
油气田地面工程(2015年1期)2015-02-09
导航定位与授时(2014年2期)2014-04-27
