
婴幼儿隐藏切口法机器人辅助腹腔镜肾盂输尿管成形术
2017-04-26 06:49:32曹华林周辉霞马立飞刘德鸿周晓光陶天王蕊郝雪梅王治芳李玮
微创泌尿外科杂志 2017年2期
曹华林 周辉霞 马立飞 刘德鸿 周晓光 陶天 王蕊 郝雪梅 王治芳 李玮
1中国人民解放军陆军总医院附属八一儿童医院泌尿外科 100700 北京
婴幼儿隐藏切口法机器人辅助腹腔镜肾盂输尿管成形术
曹华林1周辉霞1马立飞1刘德鸿1周晓光1陶天1王蕊1郝雪梅1王治芳1李玮1
1中国人民解放军陆军总医院附属八一儿童医院泌尿外科 100700 北京
目的:探讨隐藏切口法机器人辅助腹腔镜肾盂输尿管成形术治疗婴幼儿肾盂输尿管连接处梗阻的疗效。方法:回顾性分析我院6例行隐藏切口法机器人辅助腹腔镜肾盂输尿管成形术患儿的临床资料。采用传统腹腔镜方法建立手术操作通道,机器人镜头孔与1号臂操作孔建立在Pfannenstiel 皱褶(比基尼线)上,2号臂操作孔建立在肚脐正中,辅助操作孔建立在镜头与2号臂操作孔连线中下1/3处,体内操作基本同普通腹腔镜肾盂输尿管成形术。记录术前、术中、术后相关数据,术后并发症采用Clavien-Dindo分类标准进行分级。结果:6例患儿手术均获得成功,无中转传统腹腔镜和开放手术,无术中并发症。平均手术时间184.5(120~226)min、术中平均出血量9.4(5-15)ml、平均引流管拔除时间4.3(2~9) d、术后平均住院时间6.1(4~10)d。术后并发症Clavien Ⅰ~Ⅱ级发生率33.3%(经对症处理后均好转),无Ⅲ、Ⅳ级并发症。术后两天与出院当天行超声检查,术侧肾盂前后径明显减小或消失,无梗阻表现。瘢痕掩藏于Pfannenstiel皱褶上,穿上比基尼泳裤体表无可视瘢痕。结论:隐藏切口法机器人辅助腹腔镜肾盂输尿管成形术治疗婴幼儿肾盂输尿管连接处梗阻安全可行,具有视野清晰、操作精准、恢复快、美容效果好等优点。
机器人辅助;腹腔镜;肾盂输尿管成形术;儿童;肾积水
腹腔镜离断式肾盂输尿管成形术成功率与开放手术相当[1],但缝合打结困难且学习曲线长,特别是对于腹腔空间有限的儿童来说,其对术者技术要求更高[2, 3]。达芬奇机器人辅助腹腔镜手术系统大大降低了腔内解剖分离与缝合打结等精细操作的难度[4]。但小儿体型较小,操作孔间相对较近,在一定程度上增加了机器人机械臂间碰撞概率,限制了其灵活运动。为避免行机器人辅助腹腔镜肾盂成形术时机器臂间碰撞,我们在前期使用传统切口行机器人辅助腹腔镜肾盂成形术的基础上进行了改良,并成功完成6例婴幼儿手术,取得良好疗效,报告如下。
1 资料与方法
1.1 临床资料
2017年3月我们对6例肾盂输尿管连接处梗阻(UPJO)患儿行隐藏切口法机器人辅助腹腔镜肾盂输尿管成形术。6例患儿中男5例,女1例,左侧4例,右侧2例,平均年龄11.4个月(8 d~5岁),平均体重8.9(3.3~24.0)kg。1例患者因患侧腰痛就诊,其余5例均为产前检查发现肾积水。术前所有患者均行泌尿系B超、MRU及肾核素扫描等检查明确诊断为UPJO,术中证实均为先天性UPJO。
1.2 手术方法
气管内插管全身麻醉,留置尿管及胃管,患儿取健侧卧位,患侧垫高50~70°,下垫温毯,受压部位均用棉垫填塞保护,患儿尽可能靠近床沿,宽胶布固定(图1A)。经脐置入一普通腹腔镜5 mm Trocar,建立人工气腹,维持气腹压力1.064~1.596 kPa(8~12 mm Hg)(根据患儿的月龄),在内镜直视下分别于内环口上方Pfannenstiel皱褶(比基尼线)上建立机器人镜头孔(8.5 mm或12 mm)与1号臂操作孔(5 mm或8 mm),于脐与镜头孔连线中下1/3处置入一3 mm 辅助Trocar,将经脐5 mm Trocar更换为机器人2号臂操作通道(5 mm或8 mm),2-0慕丝线固定各操作通道。引导机器人床旁机械臂系统进入手术区,将各机械臂与Trocar对接(图1B)。腔内操作基本同普通腹腔镜肾盂成形术[5],右侧采用结肠旁途径,左侧根据术中扩张的肾盂与降结肠的关系采用肠系膜途径或结肠旁途径,游离扩张的肾盂与输尿管上段。距肾实质约2.0 cm处剪开肾盂,助手用吸引器将肾盂内积液吸净,2-0慕丝线牵引肾盂上角悬吊于腹壁,沿输尿管外侧纵行劈开至超过狭窄段2.0 cm以上,6-0可吸收线将肾盂最低点与输尿管劈开处最低点点对点缝合,离肾盂输尿管吻合口最低点1.0~1.5 cm处于肾盂瓣及输尿管后壁分别用一长约5.0 cm的4-0慕斯线(图2)牵引,用于缝合时钳夹与牵拉用,6-0可吸收线连续缝合肾盂与输尿管后壁,顺行置入F4.7双J管,同后壁缝合方法用6-0可吸收线连续缝合肾盂输尿管前壁,5-0可吸收线连续缝合剩余肾盂瓣口,5-0可吸收线间断缝合侧腹膜或肠系膜孔。术后留置腹腔引流管于陶氏腔(图3A),适当应用抗生素预防感染。术后并发症采用Clavien-Dindo分类标准进行分级[6]。
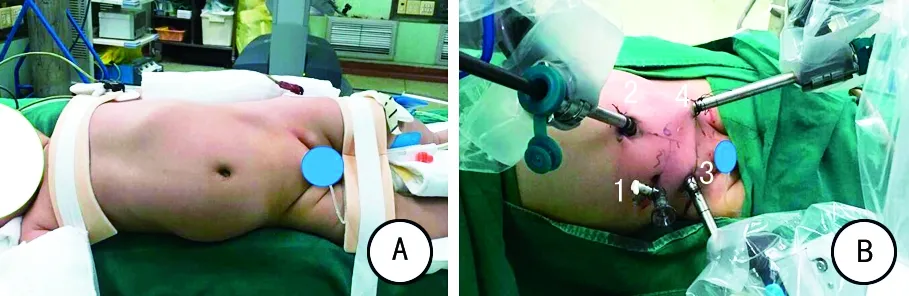
A:患者手术体位; B:Trocar位置, 1:3 mm助手操作通道; 2:机器人2号器械臂操作通道; 3:机器人镜头孔通道; 4:机器人1号器械臂操作通道。
图1 患者手术体位及Trocar位置
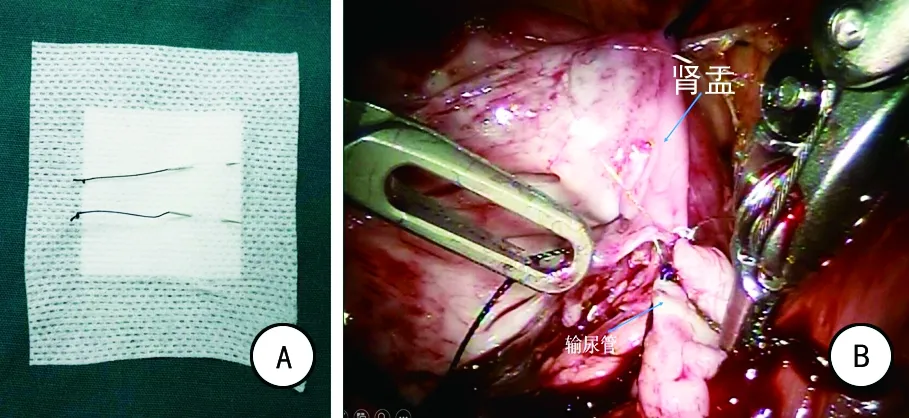
A:体内4-0慕斯牵引线; B:缝合肾盂输尿管时操作器械钳夹4-0慕斯牵引线。
图2 慕斯线牵引示意图
2 结果
6例患儿手术均获得成功,无中转传统腹腔镜手术和开放手术,无术中并发症。平均手术时间184.5(120~226)min、术中平均出血9.4(5~15)ml、平均引流管拔除时间4.3(2~9)d、术后平均住院6.1(4~10)d。术后并发症Clavien Ⅰ~Ⅱ级发生率33.3%(术后发热1例,静脉药物退烧后好转;吻合口漏尿1例,延迟拔腹腔引流管后好转),无Ⅲ、Ⅳ级并发症。术后2天与出院当天复查超声术侧肾盂前后径明显减小或消失,6例形态接近正常,无双J管堵管、无腹腔积液、无切口感染和切口疝等并发症发生。伤口瘢痕掩藏于Pfannenstiel皱褶上(图3B),所有家长对术后伤口外观均表示非常满意。
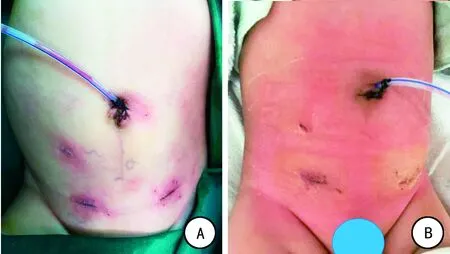
A:术后伤口外观; B:术后两天伤口外观。
图3 伤口外观
3 讨论
微创手术经过20余年的发展,在泌尿外科中得到了广泛的应用,目前大多数毁损性手术(如肾与肾上腺肿瘤切除等)基本可在腹腔镜下行微创手术治疗,但对重建性手术(肾盂成形与输尿管再植等)因其对技术要求高,术中需要反复行缝合打结操作,所以其学习曲线较长[3],特别是在腹腔空间狭小的儿童中其广泛应用受到限制。达芬奇机器人辅助腹腔镜手术系统具有3D手术视角,其机械臂活动范围可以达到7个自由度,比人手操作灵活;采用动作缩放比例技术,使动作更加精细;可过滤术者的颤抖,使术中操作稳定,有利于腔镜下的解剖分离与缝合等精细操作,大大降低了腔内操作技术难度[4, 7],其手术操作基本模拟开放手术,但其同腹腔镜手术一样具有创伤小、恢复快等优势,且其操作符合人类工程学,术者能更舒适的进行手术操作,缩短了学习曲线[8]。已有研究表明证实机器人辅助腹腔镜肾盂成形术手术的安全性及有效性,其手术成功率与传统腹腔镜手术和开放手术相当[9, 10]。然而,婴幼儿体型较小,相对较小腹腔操作空间与操作孔间较短的距离在一定程度上增加了机器人器械臂间碰撞的概率,限制了其灵活运动,增加了手术风险,所以其在年龄较小的婴幼儿中应用受到限制。此外机器人现有的手术通道(普遍采用8.5 mm Trocar)比传统腹腔镜手术通道大,理论上认为其美容效果不如传统腹腔镜,所以手术操作通道切口位置的合理设计对机器人手术尤显重要,此外,传统机器人辅助腹腔镜肾盂成形术习惯将机器人镜头置于肚脐中央,另外两个机械臂操作孔分别置于剑突下(或患侧锁骨中线上腹部)与患侧锁骨中线下腹部,辅助孔置于脐上(或脐下)[11~13]。但对年龄较小儿童其操作受限,常常需要增加1~2个辅助通道才能完成手术,且手术时间长。Chandrasoma[14]等报道采用双臂伸直体位方法用于儿童与成人肾脏重建性手术中,该方法采用分散式布局建立操作通道使机器臂间有充足的活动空间,双臂自然向下伸直可减少术后肩部疼痛及上肢神经麻痹等并发症的发生,有利于术后恢复,且其自然下垂固定不会干扰机器臂的运动,另外该方法比标准的侧卧位方法建立通道更容易,如果术中需要中转开放手术该方法亦较方便,所以他们认为这种方法非常适合儿童肾脏手术。我们前期亦采用该方法进行手术,发现该方法在小于6个月婴儿的手术中目镜离操作靶器官距离较近,机器人放大倍数较普通腹腔镜高(放大10倍)不利于对手术视野的整体观察,侧卧位内脏器官因重力因素会向健侧倾斜,目镜移动时经常会被腹腔内容物弄脏,需要多次擦洗镜头而延长手术时间,有时需要增加2~3个辅助通道才能完成手术。此外,该手术术后除了经脐部切口瘢痕可被肚脐掩盖外其余切口愈合后均在在腹部体表处留下可视瘢痕,该瘢痕可能会随着儿童的生长发育而生长,且已有研究表明,体表可视瘢痕会对儿童的生理心理发育造成不良影响[15]。为进一步改善术后美容效果,有人提出采用机器人单孔腹腔镜手术(LESS)[16],但LESS所有器械均通过单一Tri-port通道进行腔内操作,违背了器械三角分布原则,置入手术器械的部位相对集中,器械之间的相互妨碍,对于手术部位的暴露、解剖和照明均有不同程度的影响,器械拥挤使手术难度及手术风险增加,手术时间及学习曲线长。Gargollo[17]于2011年首先报道采用隐蔽切口法建立操作通道,成功应用于机器人辅助腹腔镜手术中,2号器械臂置于肚脐,镜头和1号操作通道均置于Pfannenstiel皱褶上,分散的手术操作通道避免了单孔腹腔镜手术器械拥堵碰撞等现象,且术后所有手术瘢痕均隐藏于肚脐和Pfannenstiel皱褶上,当患者恢复后体表无可视瘢痕,该研究结果表明,相比传统腹腔镜与开放手术而言此术式更受患者和家属青睐。但因儿童体型较小,如将其余通道均建立Pfannenstiel皱褶上,会导致机器臂间或辅助孔与机器臂碰撞。我们在前期的研究基础上将该方法进行了改良,将辅助孔(3 mm Trocar)建在肚脐与镜头孔连线中下1/3处,1号臂与镜头臂建立于Pfannenstiel皱褶上,2号臂于脐正中处,这样有效地增加了各通道间的距离,避免辅助孔与机器臂间及机器臂与机器臂间相互碰撞,增加了各操作通道的灵活性,充分发挥辅助孔与机器人器械臂的优势。镜头孔置于健侧内环口上方Pfannenstiel皱褶上增加了目镜与目标靶器官的距离,有效增加了手术操作空间,减少肠管及肠系膜对镜头的干扰,所以其在一定程度上缩短了手术时间,本研究中所有手术均在机器人辅助腹腔镜下完成,无术中及术后严重并发症,同时该方法保留了隐蔽切口法的美容效果,术后所有家长对切口外观表示很满意。
本研究的不足在于样本量不多、随访时间较短、缺少与传统腹腔镜及传统通道位置的机器人辅助辅助腹腔镜肾盂成形手术的对比研究,因此该术式手术效果尚需长期随访和进一步的对照研究加以证明。再者,本研究术后伤口美容效果未采用客观标准评分系统进行量化打分,家长及患者对该术后美容效果具有一定主观性。本研究所有手术均是由同一儿童腔镜手术经验丰富的主刀术者完成,对于腔镜手术经验较少的术者来说可能需要一定的学习曲线。
综上所述,隐藏切口法机器人辅助腹腔镜肾盂输尿管成形术治疗婴幼儿肾盂输尿管连接处梗阻安全可行,具有视野清晰、操作精细、创伤小、美容效果好等优点。
[1] Huang Y, Wu Y, Shan W, et al. An updated meta-analysis of laparoscopic versus open pyeloplasty for ureteropelvic junction obstruction in children. Int J Clin Exp Med, 2015,8(4):4922-4931.
[2] Palese MA, Munver R, Phillips CK, et al. Robot-assisted laparoscopic dismembered pyeloplasty. JSLS, 2005,9(3):252-257.
[3] Casale P. Robotic pyeloplasty in the pediatric population. Curr Urol Rep, 2009,10(1):55-59.
[4] Atug F, Burgess SV, Castle EP, et al. Role of robotics in the management of secondary ureteropelvic junction obstruction. Int J Clin Pract, 2006,60(1):9-11.
[5] 曹华林,周辉霞,罗小龙,等.非钳夹吻合口风合法在腹腔镜离断式肾盂成形术中的应用.中华小儿外科杂志,2016,37(2):139-145.
[6] Dindo D, Demartines N, Clavien PA. Classification of surgical complications: A new proposal with evaluation in a cohort of 6336 patients and results of a survey. Ann Sury, 2004,240(2):205-213.
[7] Chaussy Y, Becmeur F, Lardy H, et al. Robot-assisted surgery: current status evaluation in abdominal and urological pediatric surgery. J Lapendo Adv Surg Tech, 2013,23(6):530-538.
[8] Marcus HJ, Hughes-Hallett A, Cundy TP, et al. Not everything that counts can be easily counted. BMJ,2013,346:f2461.
[9] Braga LH, Pace K, DeMaria J, et al. Systematic review and meta-analysis of robotic-assisted versus conventional laparoscopic pyeloplasty for patients with ureteropelvic junction obstruction: effect on operative time, length of hospital stay, postoperative complications, and success rate. Eur Urol, 2009,56(5):848-857.
[10] Lee RS, Retik AB, Borer JG, et al. Pediatric robot assisted laparoscopic dismembered pyeloplasty: comparison with a cohort of open surgery. J Urol, 2006,175(2):683-687 (discussion 7).
[11] Kutikov A, Nguyen M, Guzzo T, et al. Robot assisted pyeloplasty in the infant-lessons learned. J Urol, 2006,176(5):2237-2240.
[12] Singh P, Dogra P N, Kumar R, et al. Outcomes of Robot-Assisted Laparoscopic Pyeloplasty in Children: A Single Center Experience. J Endourol, 2012,26(3):249-253.
[13] Atug F, Woods M, Burgess SV, et al. Robotic assisted laparoscopic pyeloplasty in children. J Urol, 2005,174(4):1440-1442.
[14] Chandrasoma S, Kokorowski P, Peters CA, et al. Straight-arm positioning and port placement for pediatric robotic-assisted laparoscopic renal surgery. J Robot Surg,2010,4(1):29-32.
[15] Tugcu V, Ilbey YO, Polat H, et al. Early experience with laparoendoscopic single-site pyeloplasty in children. J Pediatr Urol, 2011,7(2):187-191.
[16] Buffi NM, Lughezzani G, Fossati N, et al. Robot-assisted, Single-site, dismembered pyeloplasty for ureteropelvic junction obstruction with the new da vinci platform: A stage 2a study. Eur Urol, 2015,67(1):151-156.
[17] Gargollo PC. Hidden incision endoscopic surgery: description of technique, parental satisfaction and applications. J Urol, 2011,185(4):1425-1431.
Hidden incision robot-assisted pyeloplasty for children and infants
CaoHualin1ZhouHuixia1MaLifei1LiuDehong1ZhouXiaoguang1TaoTian1WangRui1HaoXuemei1WangZhifang1LiWei1
(1Department of Urology, Bayi Children's Hospital Affiliated to Chinese PLA Army General Hospital, Beijing 100700, China) Corresponding author: Zhou Huixia, huixia99999@163.com
Objective: To evaluate the clinical efficacy of hidden incision robot assisted pyeloplasty (HIRAP) for children and infants with ureteropelvic junction obstruction (UPJO). Methods: Six patients who underwent HIRAP for UPJO were enrolled in our study,the medical records were analyzed retrospectively. In our technique, the operation ports are placed like the traditional laparoscopic surgery. The first robotic working port and camera port are placed below the line of a Pfannenstiel incision. The second working 8 or 5 mm port is placed infraumbilically, and 3 mm assistant port is placed on the 1/3 mid-lower between the second working port and the camera port. The procedure is then carried out as the traditional laparoscopic pyeloplasty. The preoperative,perioperative,and postoperative date were recorded. Postoperative complications were analyzed using the Clavien-Dindo classification. Results: All surgeries were successfully completed without conversion and no intra-operative complication occurred. The mean operative time was 184.5 (120-226) min,the mean estimated blood loss was 9.4(5-15),the abdominal drainage tubes were removed after a mean of 4.3(2-9)days, and the mean postoperative hospital stay was 6.1(4-10) days. Postoperative complications (Clavien Ⅰ-Ⅱ) occurred in 33.3% children, no grade Ⅲ-Ⅳ complication was observed. Ultrasound showed hydronephrosis relieved on the discharge day. All port sites were hidden at the level of a Pfannenstiel incision,there were no visual scar on abdominal if the patient wears a bathing suit (Bikini). Conclusions: HIRAP is a safe and feasible option for the treatment of UPJO in children and infants with less trauma, rapid recovery and good cosmetic results.
robot-assisted;laparoscopy;pyeloplasty;children;hydronephrosis
首都卫生发展科研专项(2016-2-5091) 北京市科技计划(Z111107067311062) 国家公益性卫生行业科研专项目(201402007)
周辉霞,huixia99999@163.com
2017-3-30
R692
A
10.19558/j.cnki.10-1020/r.2017.02.003
论 著
猜你喜欢
中华骨与关节外科杂志(2021年12期)2021-08-31 09:10:28
云南医药(2021年3期)2021-07-21 05:40:36
中国临床医学影像杂志(2019年1期)2019-04-25 06:49:38
中国医药指南(2017年3期)2017-11-13 02:57:19
中成药(2017年3期)2017-05-17 06:09:10
山东医药(2015年15期)2016-01-12 00:40:03
中国继续医学教育(2015年4期)2016-01-07 07:38:09
中国医疗美容(2015年1期)2015-07-12 10:06:56
西南军医(2015年2期)2015-01-22 09:09:33
中国民族民间医药·下半月(2014年2期)2014-09-26 06:04:28
