
参考模型寻优策略在半主动隔振试验中的应用
2017-04-25 06:51:08李方硕周俊辉
噪声与振动控制 2017年2期
李方硕,周俊辉
(南京航空航天大学机械结构力学及控制国家重点实验室,南京210016)
参考模型寻优策略在半主动隔振试验中的应用
李方硕,周俊辉
(南京航空航天大学机械结构力学及控制国家重点实验室,南京210016)
针对一种新式的变刚度阻尼隔振器,利用NI软硬件平台,搭建半主动控制试验系统。提出一种RMBC(Reference model based control)控制策略,研究半主动隔振系统在线性扫频激励和随机组合激励下的工作特性。试验结果表明,对于扫频激励,半主动隔振系统可以有效地规避共振;对于随机组合激励,半主动系统可以根据当前工况选择最佳输出阻尼。半主动控制试验验证了RMBC控制律的有效性,同时发现一些潜在问题,可为下一步工程应用提供参考。
振动与波;隔振;变阻尼;变刚度;半主动
传统的被动隔振器刚度阻尼参数一定,不仅无法兼顾共振段、高频段的工作特性,还无法处理宽频、冲击等复杂激励情况。半主动隔振系统可以根据外激励形式和工作需求实时地调整被控参数,因而具有更加出色的工作特性。为了改进半主动系统的隔振性能,国内外学者设计了各种各样的控制律,并进行了一系列的仿真和试验研究[1]。可以简单地将半主动控制律分为实时控制律和准实时控制律两类。
(1)实时控制律:根据系统状态参数,实时地改变控制对象,以期取得最佳的控制效果,例如天棚阻尼控制[2]、加速度控制[3–4]、线性最优控制[5]。实时控制虽然可以取得良好的仿真结果,但是部分控制律并不适用于工程实际。主要原因是实时控制要求实时地改变控制参数,这对系统的响应特性提出了很高的要求。以阻尼控制手段为例,节流控制和MR(磁流变)阻尼控制响应时间处于几十毫秒量级,因而当系统振动频率较高、频繁的要求改变控制对象状态时,实时控制有可能无法实现。
(2)准实时控制律:准实时控制并不关心每一个时刻系统的状态参数,而是关心当前时段内系统工况,例如模糊控制[6]、FEBC(Frequency estimation based control)控制[7]。准实时控制包括两个步骤,一是确定当前的工况,二是根据当前工况确定被控对象的最优取值。当系统工况一定时,被控对象取值保持一致。因而准实时控制对于控制系统的响应时间没有过于苛刻的要求,更易于工程实现。
FEBC控制律是一种典型的准实时控制律,当激励力主要含有低频成分时,要求控制阻尼取最大值;而受到高频激励时,要求控制阻尼取最小值。FEBC控制律对于简谐激励或线性扫频激励简单有效,对于复杂外激励工况可能会得到错误结论。例如当隔振器共振频率为4 Hz时,外激励为

激励力主频为20 Hz,根据FEBC控制律,控制阻尼应取最小值。然而,为了抑制共振响应,控制阻尼应取最大值。
文中提出了一种RMBC控制律,可以很好地弥补FEBC控制律的不足。文章中的第一部分介绍半主动控制系统的构成;第二部分介绍RMBC控制律原理;第三部分介绍随机组合激励信号的产生方式;第四部分对比施加控制前后试验结果,并分析控制系统的优点和不足。
1 半主动隔振系统
隔振器包括三个主要部分:液压缸、油缸以及连通二者的主动阀块。两个缸体内部充满弹性单元体和液压油。主动阀块是一个节流装置,通过改变节流开度可以动态地调节整个隔振系统的刚度和阻尼特性[8]。当阀块全闭时,油缸失去作用,系统具有最大刚度;当阀块全开时,两个缸体内部的弹性介质串联工作,系统具有最小刚度。而在某一特定开度,隔振器具有最佳的耗散特性。液压缸和油缸内部布置了液压传感器,激振器连杆中间布置了力传感器,荷载表面布置了一个加速度传感器。控制阀块内部包含两个节流阀和四个二位二通电磁阀,控制信号为四路数字信号,通过控制电磁阀组的开闭可以实现对于节流开度的近似连续调节。隔振系统的运动方程如下
其中M为荷载质量,k1为液压缸内部弹性单元体集合的等效刚度,x2、k2分别为油缸内部弹性单元体集合的等效位移和等效刚度,Ft为传递力,x1为荷载位移。ccon为控制阻尼,其取值由阀块的节流开度决定,图1中的主动阀块可以获得12个节流开度,每个开度下ccon取值均已通过试验获得。

图1 半主动隔振系统原理图
2 RMBC控制律
RMBC原理:假设激励力F(t)、控制阻尼ccon已知,可以利用式(2)求得传递力幅值。最小传递力幅值对应的节流开度即为最佳开度。记FT为传递力幅值,coptimal为最佳输出阻尼

为便于实施,这里只考虑三种节流开度,分别为阀块全开(open)、半开、全关(close)工况。其中open工况下系统具有最小刚度,半开工况下系统具有最大阻尼,close工况下系统具有最大刚度。RMBC控制具体实施步骤如下:(1)截取当前1s时段内的激励力信号。(2)利用Labview软件中的“Extract Multiple Tone Information”模块辨识激励力信号前3阶谐波分量,记第i阶分量的频率为ωi,实虚部为ai和b。(3)计算不同开度下系统的传递力幅值

其中j为虚数单位,绝对值符号代表对复数取模。(4)比较不同开度下传递力幅值即可得到最优开度。
3 外激励力
3.1 线性扫频激励
在测试隔振器的工作特性时,扫频激励是最常用的工况,它可以用来仿真带偏心载荷的旋转机械变速工作的情形。线性扫频信号的具体形式在此不再赘述,在接下来的试验过程中,扫频范围为0~30 Hz,试验时间为150 s。
3.2 随机组合激励
在工程应用过程中,载荷所受的外加激励往往含有多个谐波分量,因而运用线性扫频信号进行隔振测试具有一定的局限性。以四冲程柴油机为例,机械转动造成的外激励力不仅包含基频谐波成分,还会引入二倍基频的谐波成分。为测试复杂激励情况下半主动控制律的有效性,下面将引入一种随机组合激励的产生方法,激励力F(t)可以表示为

其中相位θi、频率fi、幅值Ai均为随机量,f1∈(0,10)Hz,f2∈(10,20)Hz。在试验过程中,每组参数持续10 s,即10 s内激励力信号所含谐波成分一定,而每过10 s,激励力信号的谐波成分都将发生突变。
4 半主动试验
4.1 扫频激励工况
图2为扫频激励下被动系统和半主动系统的试验结果,其中open对应阀块全开工况,close对应阀块全关工况,control对应于RMBC控制工况。从图2(a)可以看出,半主动隔振系统可以有效规避共振峰值,改善隔振特性。从图2(b)可以看出,control曲线在低频段出现了较多毛刺,主要原因是低频段系统响应水平较低,信号中掺杂大量的噪声,控制器无法准确识别激励信号所含前三阶谐波成分,电磁阀频繁改变开闭状态。图2(c)的时域曲线更清楚地反映了这一问题,图中标号为1、2、3、4的四段异常曲线均由电磁阀不正常开闭引起。RMBC有效实施的前提是通过准确辨识外激励所含谐波成分确定当前系统工况,改进频率在线辨识方法是下一步努力方向之一。另外由于干摩擦阻尼的存在,高频段的隔振特性不够理想。
从图2可以看出,由于摩擦阻尼和流体阻尼的存在,open工况下隔振系统具有大阻尼特性,响应水平较低。为便于研究,以close工况作为参考验证RMBC控制律的有效性。试验时间400 s,试验结果见图3。
4.2 随机组合激励工况
图3(a)为整个时段上的试验结果,可以看出,通过实时改变节流开度,半主动隔振系统的工作特性要明显优于被动隔振系统。图3(b)和图3(c)为局部时段上传递力响应曲线,且具有以下特点:在起始时段,control工况和close工况传递力幅值基本一致,当外激励谐波成分变化后,control工况在1 s~2 s内切换了阀块状态,且切换后系统的隔振特性要优于close工况。图3充分说明基于RMBC控制律系统可以自适应地选择最佳节流开度,获得最优的隔振性能。
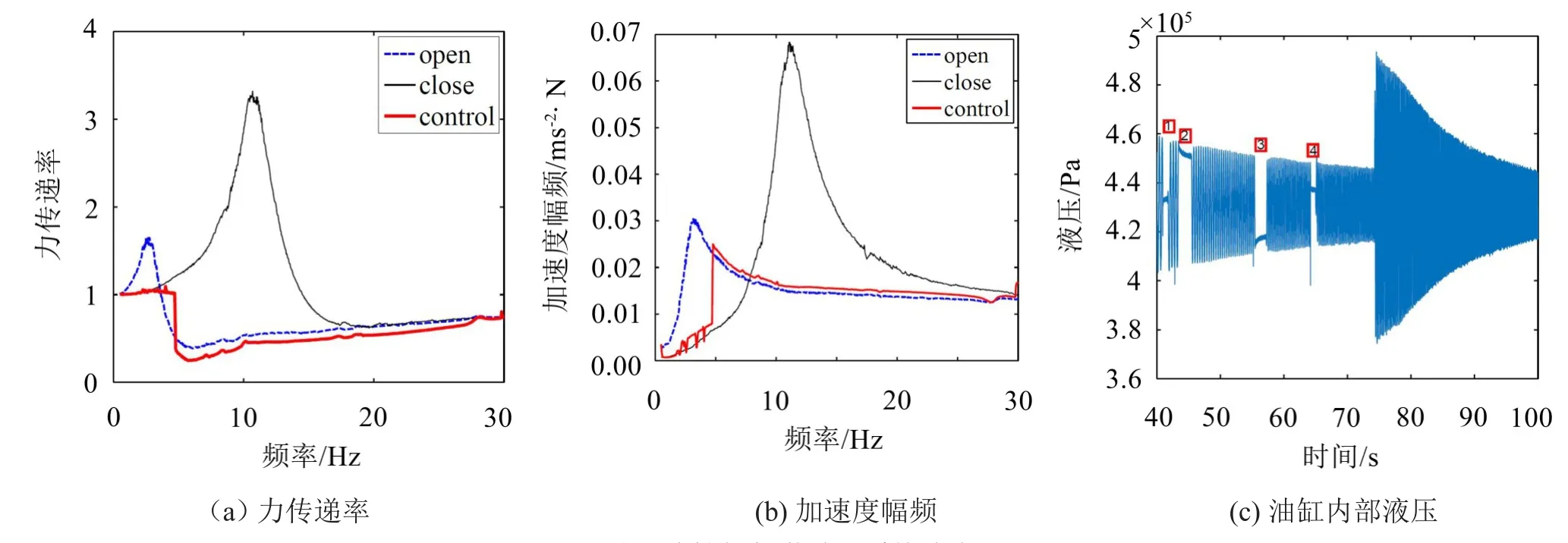
图2 线性扫频激励下系统响应

图3 随机组合激励下传递力响应曲线
5 结语
提出一种新颖的准实时控制策略,并通过半主动控制试验验证其可行性。半主动隔振系统的工作特性较被动隔振装置有了较大提高,但是文中的隔振系统仍存在不足之处。一是隔振器本身的问题,液压缸不可避免地会引入干摩擦阻尼,恶化高频段的隔振特性;二是激励力谐波成分辨识的问题,当信号掺杂大量噪声时,辨识谐波成分不够稳定,造成电磁阀频繁开闭,影响系统的工作特性。
[1]JALILI N.A comparative study and analysis of semiactive vibration-control systems[J].Journal of Vibration andAcoustics,2002,124(4):593-605.
[2]DONG X,YU M,LIAO C,et al.Comparative research on semi-active control strategies for magneto-rheological suspension[J].Nonlinear Dynamics.2010,59(3):433-453.
[3]SAVARESISM,BITTANTIS,MONTIGLIOM. Identification of semi-physical and black-box non-linear models:the case of MR-dampers for vehicles control[J]. Automatica,2005,41(1):113-127.
[4]SAVARESI S M,SPELTA C.Mixed sky-hook and add: approaching the filtering limits of a semi-active suspension [J].Journal of Dynamic Systems,Measurement,and Control,2006,129(4):382-392.
[5]RAJAMANI R.Vehicle dynamics and control[M].2 ed. Minneapolis,USA:Springer US,2011:329-354.
[6]刘会兵,廖昌荣,李锐,等.磁流变液悬置用于发动机隔振模糊控制[J].振动、测试与诊断,2011,31(2):180-184.
[7]NIETO A J,MORALES A L,TRAPERO J R,et al.An adaptive pneumatic suspension based on the estimation of theexcitationfrequency[J].JournalofSoundand Vibration,2011,330(9):1891-1903.
[8]LI F S,CHEN Q,ZHOU J H.Modeling and dynamic properties of dual-chamber solid and liquid mixture vibration isolator[J].Journal of Sound and Vibration, 2016,374:61-76.
Application of Reference Model Based Control Strategy in Semi-active Isolation Tests
LI Fang-shuo,ZHOU Jun-hui
(State Key Laboratory of Mechanics and Control of Mechanical Structures, Nanjing University ofAeronautics andAstronautics,Nanjing 210016,China)
Based on the NI-CRIO controller and Labview platform,a real-time semi-active control system is established for the experimental study of a new variable-stiffness vibration isolator.A new control strategy named RMBC (Reference model based control)is proposed,with which the isolation performance under linear swept excitation and random combined excitation is tested.It turns out that the isolator can avoid the resonance response when subjected to swept excitations.And under random combined excitation,the semi-active system can select the best output damping adaptively according to the present working condition.The semi-active isolation test has verified the efficiency of the RMBC strategy and revealed some drawbacks of the system.It has provided a reference for engineering application of the isolators.
vibration and wave;vibration isolation;variable damping;variable stiffness;semi-active
TH113.1
A
10.3969/j.issn.1006-1355.2017.02.038
1006-1355(2017)02-0188-04
2016-12-16
李方硕(1989-),男,江苏省连云港市人,博士生,主要研究方向为振动控制。E-mail:fsli_detec@nuaa.edu.cn
周俊辉,男,硕士生。E-mail:jhzhou_detec@nuaa.edu.cn
猜你喜欢
装备制造技术(2020年11期)2021-01-26 00:38:58
航天器环境工程(2020年3期)2020-11-04 06:46:24
电子测试(2017年12期)2017-12-18 06:35:24
电子制作(2017年8期)2017-06-05 09:36:15
中国新技术新产品(2017年1期)2017-01-20 17:25:16
通信技术(2016年12期)2016-12-28 10:34:54
科学与财富(2016年28期)2016-10-14 20:28:09
中国科技博览(2016年16期)2016-09-19 09:56:44
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:17
上海电机学院学报(2015年3期)2015-02-28 14:29:51
