
基于图像显著性与最小二乘法支持向量机的柿子识别
2017-04-24 08:32侯绪杰王晓健程义民
陕西林业科技 2017年6期
侯绪杰,王晓健,程义民
(山东潍坊职业学院,山东 潍坊 261031)
随着以计算机科学与自动化科学为代表的装备智能化领域的发展,推动了以采摘机器人为代表的农业智能装备的进步。采摘作业属于繁重类作业,让机器人代替果农进行采摘作业,首先需要解决的问题为如何将果实从复杂的背景中提取问题。对此国内外进行了大量的研究。华南农业大学陈科尹等人利用视觉显著性对水果进行图像分割,达到了良好的效果。潍坊学院的宋健在G-B因子下利用双阈值法对茄子进行分割。江苏大学的赵德安利用k-mans算法与神经网络对苹果进行分割与识别。日本的山形健等人利用神经网络与自动阈值法对西红柿进行有效分割。
柿子为我国广泛种植的经济作物,但是国内外对于其果实的识别算法研究较少,严重制约了柿子采摘现代化的发展。
本文以柿子为研究对象比较了几种颜色模型以及其显著性特征,在对特定颜色因子下对其进行相应的显著性处理后利用K均值聚类算法对其进行分割提取处理,提取其颜色与纹理特征,最后利用LS-SVM进行识别学习与判断,得到较为满意的效果。
1 材料与方法
1.1 图像采集
图像采集地点为山东省临朐石门坊柿子林,采集状态为自然光下采集,时间为2015年10月份,下午14:00左右。柿子品种为五月红。相机采用松下FZ10数码相机。图像处理软件为VS2010,为了方便处理,将采集到的图像裁剪成为640×480,采集图像如图1所示:

图1 采集图像
1.2 颜色空间选择
选择合适的颜色空间的对图像进行处理之前必须要进行的一步,颜色空间的选择主要是按照果实与背景差异性来选择。一般的颜色空间主要有RGB,HSV,Lab,以及HSL等。经过多种空间颜色模型的实验与直方图统计,本文得出图像在Lab下a分量下果实与背景差异明显。Lab是一种感官均匀的颜色模式,表达色彩范围上属于RGB颜色空间。此颜色空间是用三个分量相互垂直的坐标线来表示色彩空间。RGB转换至Lab空间模型时需要转换成XYZ模式作为中间模型进而进行中间转换。转换格式如下所示:
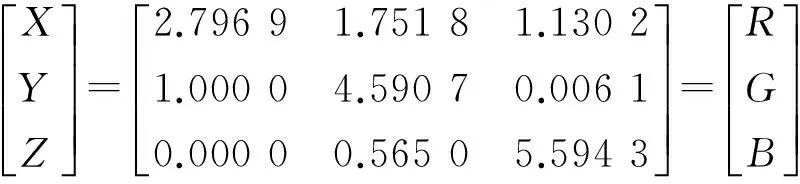
(1)
(2)
a=500[f(X/X0)-f(Z/Z0)]
(3)
b=200[f(Y/Y0)-f(Z/Z0)]
(4)
(5)
L,a,b分别为颜色中间中的亮度、红色至绿色的范围值以及蓝色至黄色的范围值。t为函数转换变量。
将图像进行单通道分割,提取a分量颜色因子并对其横切面进行直方图统计如图2所示:

图2 a分量下图像以及果实中线直方图
根据图像以及图像抛线统计直方图可以看出在次空间模型下果实与背景差异性明显,果实明显强于背景。适合分割。
1.3 图像显著性处理
图像显著性是一种基于人的注意力与认知感的物理模型。主要表现为图像中最受人关注的程度。被广泛应用于图像处理中。该模型由Itti.L提出,最早的模型为Itti模型,后有人不断的改进,出现各种相应的显著性数学模型。本文根据柿子果实与背景的的差异性特征。设设Ia为Lab下a分量的值,Ia,σ(x,y)为a分量下与不同尺度的σ高斯滤波后的值。所以显著性公式为:
S(x,y)=‖Ia-Ia,σ(x,y)‖
(6)
使用此公式对图像进行处理。图3为显著性效果图。

图3 显著性效果图
1.4 K-means聚类分割
K-mena聚类算法是一种无监督实时聚类算法,此算法基于样本空间像素相似性进行聚类操作,聚类之前首先要确定所要聚类族簇个数,即将样本空间x个对象分为K类,使每个族簇内样本有高度的相似性,且族簇间样本差距较大,类间相似度是依照各聚类中像素的均值所获得一个引力中心来进行计算的。
K均值算法实现步骤如下:
1)对给定的样本x(图像),设定迭代次数n,指定k做为初始聚类中心。
2)对样本空间中每个数据对象与初始聚类中心的相似度距离系数D(Xi,Cj(r));其中i=1,2,3,……,k;
构成簇,Wj若满足公式(7)
(7)
其中,Xi∈Wj,Xi记为w;其中ε为任意给定的正数。
3)逐步计算k个聚类中心,公式如下:
(8)
聚类准则定义为:
(9)
4) 判断计算是否合理,判断算法如下:
|E(r+1)-E(r)|<ε
(10)
如满足以公式(9)则可以停止计算,若不满足返回(6),(7)继续运算。
基于对显著性特征,设图像聚类中心为2,迭代次数为100次,进行聚类分割然后将分割后的轮廓进行形态学处理,并且最终提取果实。如图4所示:

图4 识别效果
2 特征提取
物体的特征一般分为颜色特征,形状特征以及纹理特征。由于果实存在被叶子遮挡或者生长不规则等特征如果选用形状特征进行提取判断容易造成误判等现象。本文以果实的颜色与纹理特征作为特征量进行提取。
2.1 纹理特征的提取
纹理特征是物体表面的一种品质。是识别果实的重要特征。灰度共生矩阵一般作为映射图像纹理特征的主要指标。
提取果实的ASM,CON,COR基于灰度共生矩阵的指标来作为纹理特征。能够很好的反应出果实的纹理信息。设N为灰度级,分别为图像行与列方向上纹理参数的均值与方差。P(i,j)为像素点数。提取公式分别如下;
(11)
(12)
(13)
2.2 颜色特征提取
根据上文研究得,柿子除了lab下a通道内颜色与背景颜色差异明显外,其他差异不显著,所以本文提取其中颜色空间内的a分量的平均值作为颜色特征分量。
Lab内a分量的平均值am提取公式为:
(14)
3 识别模式
SVM 是一种具有监督学习的模式,其在解决小样本学习,非线性,以及高维度问题中,具有很大的优势。最小二乘法向量机算法LS-SVM相较于标准的SVM来说,其可以通过对一组线性方程组求解从而代替标准支持向量机的复杂二次空间规划求解。其引入拉格朗日函数来进行优化约束。将高维空间内最优决策转换为等式约束方式。其求解速度更快,准确率更高。
经对拉格朗日乘子最优化求解以后得出最小二乘法向量机LS-SVM分类模式为:
(15)
其中K(xi,yi)=exp(-(xi-xj)2/σ2)
(16)
ai为线性方程组所求的系数变量。
K(xi,yi)为输入空间到多维特征空间的线性映射。将提取的样本特征量作为输入值,经过训练得到LS-SVM分类器。
分类器输入向量分别为:ASM,CON,COR以及Lab下a分量的平均值。本文选取RBF作为向量机的核函数。程序运行流程如图5所示。
核参数与惩戒系数的选择对支持向量机的性能有着重要影响。根据文献所得文本σ2=150.385,γ=0.368 2为最佳参数,此时模型精度最高。

图5 果实识别流程图
4 结果分析检验
本课题实验用PC机为研华科技610L工控机,2.6HZ,RAM为4G,操作系统为WIN7。图像处理部分采用Opencv库,分类识别部分采用比利时鲁文大学开发的LS-SVM Matlab工具箱。选用Matlab2013b进行分类实验。在自然光下采集图像60张,30张作为训练集,其余图像作为测试分类。
将采集到的图像按照图4的识别流程进行处理,判别成功输出1,判别失败输出0。剩余实验照片分为顺光,逆光以及阴天下采集。
为对比与标准SVM的区别实验分别进行SVM下与LS-SVM下的实验对比。结果如表1所示:
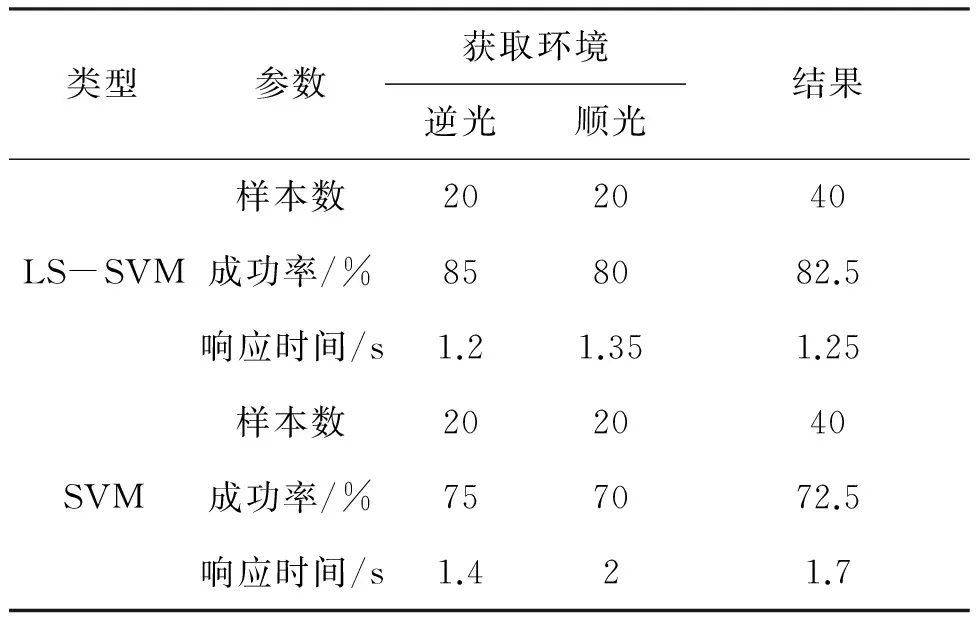
表1 实验数据
经过分析检验对比可看出:
(1) LS-SVM相交与普通SVM无论是在响应时间以及识别成功率上都要好,识别成功率提高了10%。所以使用最小二乘法对支持向量机进行优化的策略非常有效。
(2) 在逆光下识别率与响应时间都要优于顺光下,这是由于在处理图像时候光照不均匀导致提取特征受到干扰以至识别受到干扰。
(3) 识别失败还主要受枝叶的遮挡影响。造成提取与识别失败。
5 结论与讨论
(1) 在a分量下针对柿子果实进行基于图像显著性特征处理能够很好的强化果实特征,易于后续处理。
(2) 在对预处理后的图像进行合适参数的K-means聚类分割与形态学处理能够很好的提取果实轮廓。
(3) 提取颜色与纹理特征值作为输入使用LM-SVM对于柿子的识别非常有效,取得了较短的相应时间与较高的识别效率。
(4) 针对果实被枝叶遮挡的影响识别失败这一情况,要进一步优化识别算法来抵消遮挡影响。
参考文献:
[1] E J Van Henten, J Hemming, B A J Van, et al.Collision-free Motion Planning for a Cucumber Picking Robot[J].BiosystemsEngineering, 2003, 86(2):135-144.
[2] 宋健,孙学研,张铁中.开放式茄子采摘机器人设计与实验[J].农业机械学报,2009,40(1):143-147.
[3] 王辉,毛文化. 基于视觉组合的苹果作业机器人识别与定位[J].农业机械学报,2012,43(12):165-170.
[4] 宋健,王凯,张晓琛.茄子采摘机器人目标识别与测距方法[J].实验室探索与研究,2015,34(9):54-57.
[5] 张国权,李战明,李向伟,等.HSV空间中彩色图像分割研究[J].计算机工程与应用,2010,46(26):179-181.
猜你喜欢
新作文·小学低年级版(2022年6期)2022-08-30
快乐语文(2021年34期)2022-01-18
基层中医药(2021年12期)2021-06-05
心声歌刊(2020年5期)2020-11-27
软件(2020年3期)2020-04-20
智族GQ(2019年9期)2019-10-28
摄影之友(影像视觉)(2018年12期)2019-01-28
英美文学研究论丛(2018年1期)2018-08-16
科学大众(中学)(2018年12期)2018-02-21
Coco薇(2017年8期)2017-08-03
