
两轮自平衡遥控植保车的研发
2017-04-22 12:02史云天吴光华
农业工程技术·综合版 2016年12期
关键词:卡尔曼滤波
史云天+吴光华
摘要:该文主要是对农业植保平衡车的研究。本系统主要分为两部分,分别为无线收发部分和智能控制部分。智能控制部分主要是使得小车能够稳定的行走。首先对卡尔曼滤波进行研究,调节参数,使得电机转动稳定,在进行调节直立环pid,小车能够直立行走,再进行速度环的参数调节和硬件调试,小车能够稳定的站立和行走。转弯闭环调节,能够使得转弯时车身保持稳定。无线接收部分主要是通过小车使用ppm调制方式,对小车进行远距离控制盒调试,使得平衡车能够直立前进和后退行走,转弯行走和急停控制。在车身的前端加上喷洒装置,使得车子能够喷洒农药作业,车上会使用无线遥控,方便操作人员观察前方的路况和观察植保车的喷洒情况。
关键词:马农业植保平衡车;卡尔曼滤波;pid;喷洒装置
1 系统测量方案
系统主要有车体直立模块、无线数据传输模块、喷洒模块、无线视频模块。车体直立模块主要包括角度测量模块、加速度测量模块、电机驱动模块和主控制芯片模块。无线传输数据模块主要发送控制车身各种指令,对车身进行操控。喷洒模块进行喷洒作业,而无线遥控模块方便操作人员进行道路的观察。
1.1 车身直立原理
卡尔曼滤波是采用信号与噪声的状态空间模型[1],利用前一时刻的估计值和现时刻的观测值来更新对状态变量的估计,求出现时刻的估计值。实质是由量测值重构系统的状态向量。它以“预测—实测—修正”的顺序递推,根据系统的量测值来消除随机干扰,再现系统的状态,或根据系统的量测值从被噪声干扰的系统中恢复系统的本来面目。PID控制器的参数整定是控制系统设计的核心内容[2]。它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。PID控制器参数的工程整定方法,主要有临界比例法、反应曲线法和衰减法。
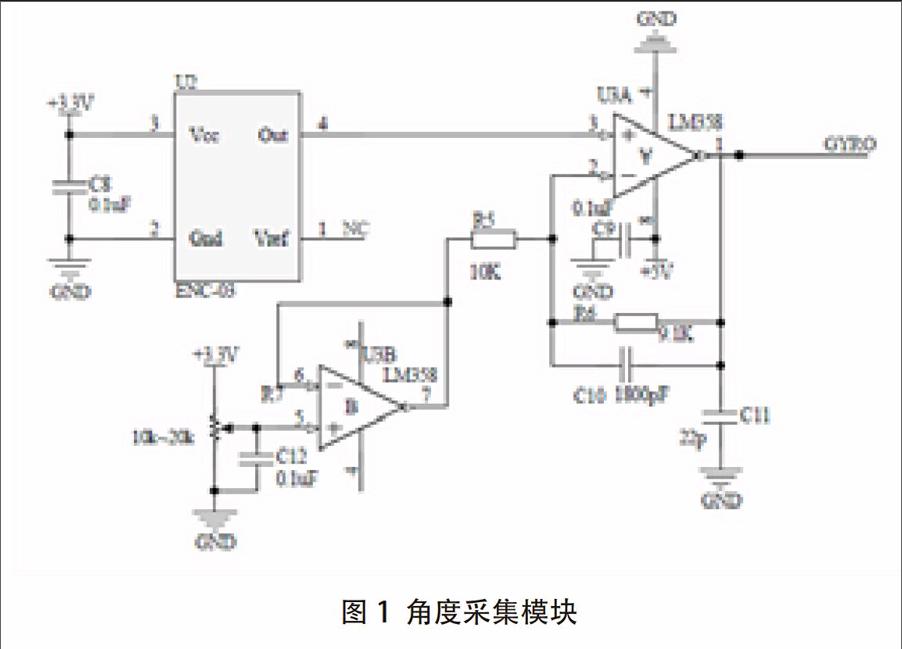
1.2 角度采集模块
由图1知道,enc-03供电电压为3.3 v,为4脚芯片,分别为Vcc,GND,Vref,Out。此传感器通过lm358将信号进行放大,最后得到角度值。测量范围在0-180°之间,我们规定基准职位90°。
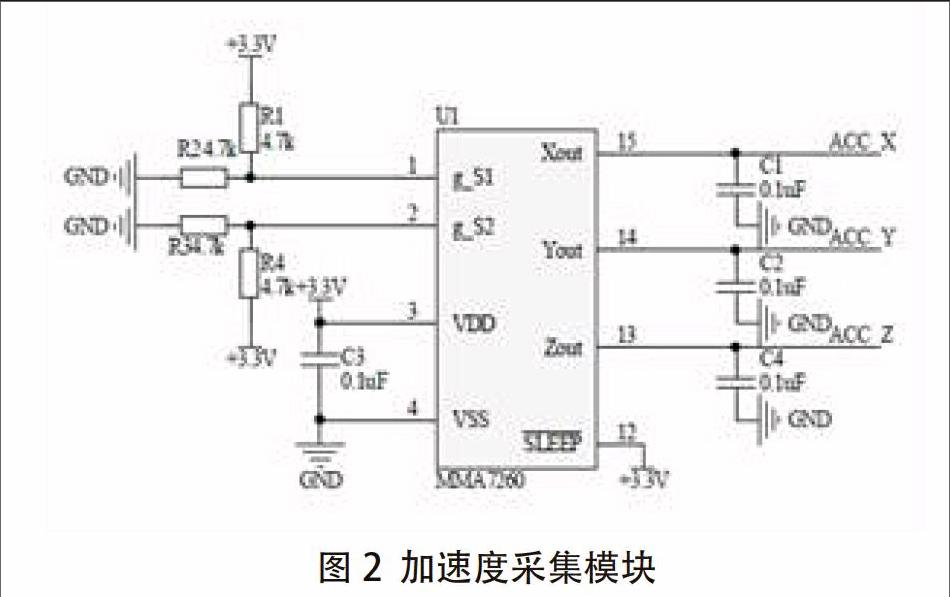
1.3 加速度传感器
加速度传感器我们采用的MMA7260,需要3.3 v的供电电压,采用3轴加速度传感器主要是为角度传感器进行校正,我们使用Z轴为方向轴,采集数据范围为正负90°。输出量为模拟量,通过单片机的ad功能进行采集。如图2所示为加速度传感器电路[3]。
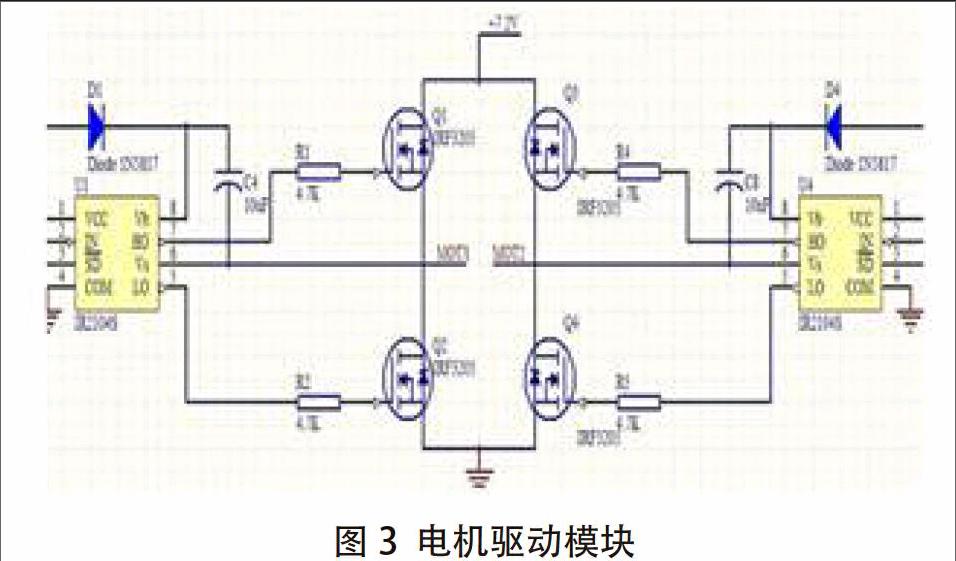
1.4 电机驱动电路
电机驱动电路的电源可以直接使用电池两端的电压。模型车在启动过程中往往会产生很大的冲击电流,一方面会对其它电路造成电磁干扰;另一方面由于电池内阻造成电池两端的电压下降,甚至会低于稳压电路所需要的最低电压值,产生单片机复位现象[4]。为了克服启动冲击电流的影响,可以在电源中增加容值较大的电解滤波电容,也可以采用缓启动的方式控制电机[5]。在启动时,驱动电路输出电压有一个渐变工程,使得电机启动速度略为降低从而减小启动冲击电流的幅度。
1.5 农药喷洒杆
此车主要用于农药喷洒和农田灌溉,用多个喷洒头能够增加喷洒面积,减少喷洒次数。喷洒使用的是高压力喷头,在喷洒效果和效果方面增加了许多。
2 直立车算法
两轮自平衡遥控植保车不仅需要外部的各项驱动,同时也需要相应的算法来支持平衡车进行平衡调节[6],采用的卡尔曼滤波pid调节,使得车模能够很好的直立行走和完成各种指令动作。
2.1 卡尔曼滤波
卡尔曼滤波是以最小均方误差为估计的最佳准则,来寻求一套递推估计的算法,其基本思想是:采用信号与噪声的状态空间模型,利用前一时刻地估计值和现时刻的观测值来更新对状态变量的估计,求出现时刻的估计值。實质是由量测值重构系统的状态向量。它以“预测—实测—修正”的顺序递推,根据系统的量测值来消除随机干扰,再现系统的状态,或根据系统的量测值从被噪声干扰的系统中恢复系统的本来面目[7]。
2.2 PID控制
PID调节器是一种线性调节器,它将给定值r(t)与实际输出值c(t)的偏差的比例(P)、积分(I)、微分(D)通过线性组合构成控制量,对控制对象进行控制。PID调节器各校正环节的作用比例环节:即时成比例地反应控制系统的偏差信号e(t),偏差一旦产生,调节器立即产生控制作用以减小偏差[8]。
积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数TI,TI越大,积分作用越弱,反之则越强。
微分环节:能反应偏差信号的变化趋势(变化速率),并能在偏差信号的值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减小调节时间。
2.3 采样时间对系统的影响
采样周期越小,数字模拟越精确,控制效果越接近连续控制。对大多数算法,缩短采样周期可使控制回路性能改善,但采样周期缩短时,频繁的采样必然会占用较多的计算工作时间,同时也会增加计算机的计算负担。而对有些变化缓慢的受控对象无需很高的采样频率即可满意地进行跟踪,过多的采样反而没有多少实际意义。最大采样周期根据耐奎斯特采样定理可知[9]。
3 直立车程序
直力车的程序包括电机转动的控制,角度传感器采集程序[10],加速度采集的程序,卡尔曼滤波的程序,PID调节的程序等,将这些程序综合起来使得小车能够直立行走。
3.1 采集程序
此部分程序主要是进行加速度传感器和角度传感器的数据采集,选通两路AD端口,采集回来的值通过相应的公式计算出对应的数量。
void Ad_data_proc(void)
{
int i;
Acc_z_data=0;
猜你喜欢
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
电脑知识与技术(2016年27期)2016-12-15
软件导刊(2016年9期)2016-11-07
科技视界(2016年14期)2016-06-08
电脑知识与技术(2016年2期)2016-03-22
光学仪器(2015年1期)2015-07-30
