基于触摸屏的玉米联合收获机智能监测系统的研究
2017-04-22 19:59刘立强项建廷吴泽全
农业科技与装备 2016年10期
关键词:触摸屏
刘立强+项建廷+吴泽全

摘要:基于4YZ-8型玉米籽粒联合收获机,设计收获机工作状态信息采集、传输、存储、显示实时检测方法,以实现对籽粒流量、含水率、割台高度、行走速度、升运器转速、脱粒搅龙转速、粮仓状态、发动机状态等主要工作状态参数进行实时监测,以及对工作部件异常进行声光报警。
关键词:联合收获机;玉米籽粒;智能监测;触摸屏
中图分类号:S225.51 文献标识码:A 文章编号:1674-1161(2016)10-0015-03
随着国家对种植业结构的调整,我国的玉米种植面积不断增加,导致玉米收获机械的需求逐年增大,但我国的农业机械化技术水平与发达国家相比存在较大差距,缺少智能监测系统和故障早期预警手段的问题日益突出。本课题研究设计一种玉米联合收获机智能监测系统,可以实现对籽粒流量、含水率、割台高度、行走速度、升运器转速、脱粒搅龙转速、粮仓状态、发动机状态等主要工作部件进行实时监测。
1 国内外相关研究现状
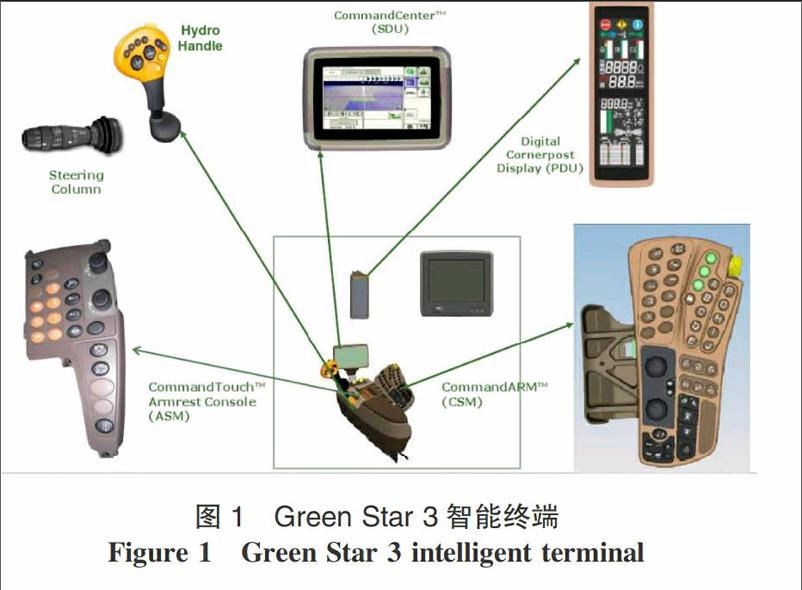
目前,国外发达国家相继研究出不同型式的联合收获机监测系统,大部分收获机已采用智能调节(脱粒滚筒恒速控制系统、机具作业速度自动控制系统)、操控系统(自动驾驶系统、操作辅助系统)与产量监测系统。这些系统均为电子式监测系统,主要由中央处理器、部件工况传感器、信号转换线路、报警控制和信号显示输出等装置构成,通过工况传感器对各项作业参数和工作部件运行情况进行检测,检测信号转换后输入中央处理器,经分析判别后由显示装置进行实时显示,当机具作业发生异常时,通过声光进行报警提示。国内常见的有:美国凯斯公司的AFS(Advanced Farming System)系统,其包含多种传感器、差分全球定位系统DGPS、田间信息实时数据采集系统,能统计生成产量分布图,准确可靠地获取作物瞬时流量、含水率、收获机行进速度、割台高度及脱粒后的作物传送速度等工作参数;约翰迪尔公司的Green Star 3(绿星第三代)Command Center系统配备触摸控制系统,控制中心操控台、触控扶手和数字显示器(如图1所示),使得操控更加智能,操作员可及时诊断发现问题,从而快速地解决问题。
目前,我国新型玉米联合收获机正向大型高效、多功能与智能化发展,故障诊断、产量监测、定位导航等作业智能控制技术在联合收获机上已有应用。通过对联合收获机关键部件技术及工况监测等技术的研究,可以实现自动驾驶、作业性能调控、故障自动检测与预警、在线测产等智能控制技术,有力地促进了我国联合收获机产品技术提升。
中国农业大学开发了基于双板差分冲量式谷物流量传感器的联合收获机智能测产系统。八一农垦大学针对国内联合收获机转动轴低速报警监视装置存在的问题,设计了一种新型轴低速报警监视装置。浙江大学通过对联合收割机转轴轴承温度的实时监测,实现了对联合收割机主要工作部件进行监测,能够对收割机发动机、关键旋转部件及电气系统工作状态进行指示。此外,上海交通大学、山东农业大学、华南农业大学及中国农业机械化科学研究院等高校院所都有相关的研究。
2 系统总体构成
玉米联合收获机智能监测系统主要由车载智能监测终端、温度与转速传感器、产量传感器、水分传感器、夜视摄像头、GPS定位系统和CAN总线网络等构成,其总体结构如图2所示。
2.1 主要工作部件监测
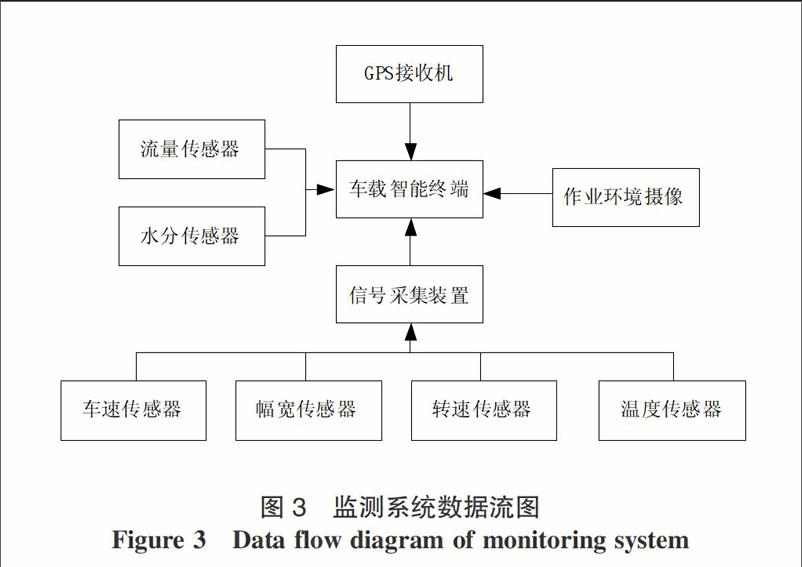
要获得联合收获机工作状态及玉米产量,必须测定工作部件工况、作业环境、玉米产量和测量点的坐标位置等信息。系统选用的玉米籽粒流量传感器、含水率传感器、割台高度传感器、行走速度传感器、升运器与脱粒搅龙转速传感器、作业环境信息(粮仓、发动机等视频)、GPS接收机与车载监测终端之间的数据传送流向见图3。
多路传感器信号通过CAN总线网络传输至车载智能终端,智能监测系统通过对多路传感器信息进行分析与处理后,实时显示各工作部件工况参数和故障信息。此外车载智能终端还能够根据实时获取的玉米质量流、含水率及GPS定位等信息,实现联合收获机运行轨迹图及产量分步图的绘制。
2.2 产量监测
作物流量传感器是产量监测中最主要的传感器,它可以自动计量累计产量,通过换算生成对应时间间隔内作业面积的单位面积产量。由于本监测系统应用在4YZ-8型玉米籽粒联合收获机上,通过选型最终采用AG Leader公司的冲量式流量传感器、含水率传感器(CAN总线传输),如图4所示。该传感器具有容易校准、准确性好、精度高、安装方便等特点,且使用传感器时不影响联合收获机正常工作。
实际测产时,利用AG Leader公司的PF(Precision Farming)产量监测系统,冲量式流量传感器获取玉米籽粒产量信息,GPS接收机测得对应产量值的空间位置坐标,利用产量图生成软件SMS 3.0绘制相应玉米产量分布图。
2.3 视频监测
新型玉米联合收获机配置了全密闭的驾驶室,操作员需要停车判断驾驶室外的工作环境(如收获机周边环境、人员状态、发动机区域状态、粮仓状态、秸秆粉碎抛洒状态等),通过增加视频监测画面,可有效地增加操作员对收获机周边状态的掌控,避免人为疏忽事故的发生。
2.4 监测软件设计
监测系统软件主要由CAN总线数据通信、工况数据实时处理、视频采集处理、触摸屏显示控制和GPS定位信息管理等模块组成,因C语言编写的软件可采用模块化设计,生成的机器代码质量高、可读性强、移植性好,所以本监测系统的软件采用C语言编写,主界面如图5所示。
3 系统调试与试验
系统模拟调试在实验室内完成:通过模拟转速信号、温度信号等工况信号,监测系统能迅速响应并显示新的数值;通过抛洒实验装置模拟玉米籽粒抛洒冲击流量传感器,监测系统能迅速響应并显示质量数值。系统模拟调试完成后,将该监测系统应用于4YZ-8型玉米籽粒联合收获机,于2016年11月10—14日,在兰西县实验农场进行玉米籽粒收获机田间收割试验,对玉米联合收获机智能监测系统的综合性能进行测试。
试验结果表明:联合收获机工况在线监测系统运行正常,所设计的行走速度、升运器转速、脱粒搅龙转速等检测装置工作性能良好,满足了田间作业工况监测的功能需求和精度要求。操作人员通过监测终端可以实时地掌握整机作业工况、各关键部件的工作负荷和故障状态,并及时做出调整处理,减少了田间收获故障的发生率,提高了作业效率。同时也发现低温冷车状态下对运行影响较大,出现无法启动的情况,热车后情况有所好转。
4 结论
1) 设计一种玉米收获机作业在线监测装置,实现对籽粒流量(含水率)、割台高度、行走速度、升运器转速、脱粒搅龙转速、粮仓状态、发动机状态等主要工作状态参数的自动检测。
2) 设计工况及故障预警系统实时采集、显示及保存玉米联合收获机械的定位状态和作业参数,并在故障工况下进行报警提示。
3) 基于触摸屏的玉米联合收获机智能监控系统进行田间试验,验证本系统的可靠性和实用性。
参考文献
[1] 卢文涛,张莉杰,张东兴,等. 联合收获机监控系统研究现状[J].农机化研究,2014(9):256-259.
[2] 刘文亮,刘枫,胡浩,等.玉米联合收获机主要部件故障监测系统研究[J].农机使用与维修,2015(9):17-19.
[3] 胡浩,范志华,刘枫,等.玉米联合收获机自动监测系统的研究现状浅析[J].农业与技术,2015(7):51-52.
[4] 梁学修,陈志,张小超,等.基于CAN总线的联合收割机在线监测系统的设计与实现[J].农机化研究,2013(7):81-84.
[5] 陈树人,张漫,汪懋华.谷物联合收获机智能测产系统设计和应用[J].农业机械学报,2005(1):97-99.
[6] 高飞.联合收割机主要工作部件监测装置研究[D].杭州:浙江大学,2012.
猜你喜欢
少儿科技(2020年2期)2020-05-13
汽车实用技术(2020年1期)2020-02-25
知识就是力量(2018年7期)2018-07-11
大众健康(2017年5期)2017-05-20
科技创新与品牌(2015年10期)2015-10-27
中国信息化·学术版(2013年5期)2013-10-09
中国信息化·学术版(2013年5期)2013-10-09
职业·下旬(2009年11期)2009-12-29
计算机世界(2009年49期)2009-05-13
中学科技(2008年1期)2008-02-27