多旋翼式无人飞行器系统设计研究*
2017-04-22 07:45程荣涛王荣颖范松伟
舰船电子工程 2017年4期
程荣涛 马 恒 王荣颖 范松伟
多旋翼式无人飞行器系统设计研究*
程荣涛1马 恒2王荣颖2范松伟2
(1.海军驻武汉四三八厂军事代表室 武汉 430060)(2.海军工程大学导航工程系 武汉 430033)
多旋翼式无人飞行器相对其他飞行器具有能够垂直起降以及操控简单等优点,在军事任务中具有很大的应用前景。为此,论文设计了一种舰用多旋翼无人飞行器系统。首先提出了多旋翼式无人飞行器的设计指标,然后按照该设计指标对多旋翼式无人飞行器系统进行总体的设计,最后通过半实物仿真实验以及原型样机飞行试验,验证了所设计系统的可行性。
多旋翼式无人飞行器; 设计指标; 系统设计; 飞行试验
Class Number V249.1
1 引言
无人机的出现,为完成作战人员不易接近或易伤亡的作战任务提供了有力的手段[1]。由于多数舰艇上供飞行器起降作业区域小,固定翼飞行器的使用受到限制,难以适应实际需要,只有具有垂直起降功能的旋翼式飞行器才能适合小型舰艇搭载使用。直升机类无人机也具有垂直起降功能,但操控较为困难,需要操作手有丰富操作经验,培训时间较长,而多旋翼无人机的操控相对简单,经过较短时间培训人员即可胜任。因此采用微小型多旋翼无人机成为舰用小型飞行器的首选[2~3]。
在已搭载有人直升机的舰艇上,再搭载微小型多旋翼飞行器,既可以作为舰载有人直升机的有效战斗补充,也可在近距离、超低空、短途和其它直升机不适合完成的航空作业中使用。同时其低廉的购置成本、飞行成本相对于直升机具有巨大的优势[4]。
综上所述,在现代复杂作战环境中,为构建良好的无人机侦查与作战系统,发展多旋翼飞行器技术显得尤为必要。本文首先分析了舰载多旋翼式无人飞行器的军事需求,并根据实际作战任务提出了系统的设计指标,然后分别从动力飞行、远程无线数据和飞行控制等子系统对舰载多旋翼式无人飞行器系统进行了详细的设计研究,最后通过半实物仿真实验和原型样机飞行试验,验证了系统的可靠性。
2 设计指标
对于本文所研究的舰载需求的小型无人机,最为关心的是载荷和滞空时间两个技术指标。通常期望无人机的载荷尽可能的大,并且滞空时间尽可能的长。但是由于当前的技术限制和造价限制,在可以接受的造价基础上,确定了相应的技术指标。同时根据当前的技术手段和旋翼式飞行器的工作模式,估算出旋翼式飞行器的部分技术指标的理论极限值[5~6]。
制约这些技术指标的主要技术问题在于三个方面,电池储能技术、马达技术、机身材料技术。当前机身材料技术和马达技术基本处于瓶颈状态,无法有大幅提升的可能,未来有可能大幅提升的技术只有电池技术,如果电池的能量储存密度大幅提升,则飞行器的滞空时间则能大量延长。当前的锂电池的能量储存密度为150Wh/kg~170Wh/kg,现有小型马达50%动力有效输出的效率为8g/w~14g/w左右,拉力从600g~1200g左右,假设机体质量为xkg,电池质量为ykg,滞空时间为h小时,采用电池能量储存密度为160Wh/Kg,马达50%动力有效输出的效率为12g/w则各变量应符合如下公式:
(1)
整理得
(2)
式中x≥0,y≥0,易知当x=0,y趋近于无穷大时,h存在极限值1.92。
但通常x是无法为零的,根据实际情况,采用4轴的架构,为了保证机体的足够强度,采用碳纤维材料制作,机体的质量约为0.5kg,机载必要控制板、各种传感器、电子调速器、马达、桨叶、数据链、遥控接收机、电缆等设备的总质量约为1kg,即x值为1.5,同时为保证有足够的升力,假设单电机的50%动力输出的拉力为1000g,取y为2.5,则h=1.2,则能够实现的最大的续航时间约为1h。但由于实际的电池效能和马达的输出效率与拉力未必能够达到理论的标称值和存在不可避免的损耗,预计的理论最大续航时间约为40min。
飞行器的飞行主要动力是马达和桨叶,要飞行时间长,就需要所选用的马达能够有更高的效率。在能够使用的拉力输出点,耗费更小能量,才能够使得飞行器的滞空时间延长。综合考虑到费效比和实际需求,提出了多旋翼飞行器的技术指标,如表1所示。
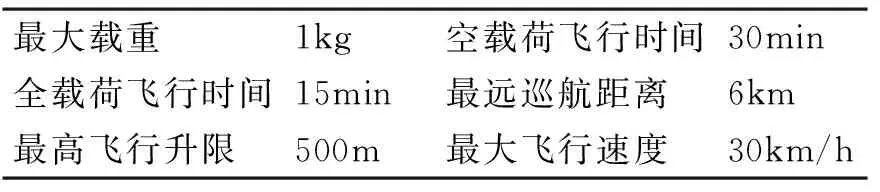
表1 多旋翼无人机技术指标
3 系统设计
飞行器主要包括六大子系统[7]:动力飞行子系统、远程无线数据子系统、自动控制与驾驶子系统、地面控制子系统、电源子系统、外挂子系统。其系统结构框图如图1。由于篇幅有限,本文只对前三个主要的子系统的设计进行具体的阐述。
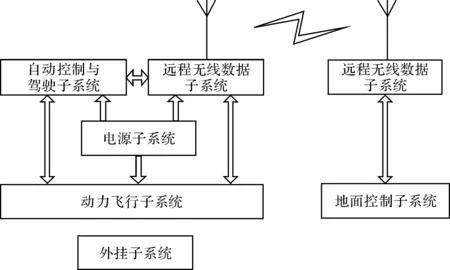
图1 多旋翼无人机系统结构图
3.1 动力飞行子系统
动力飞行子系统主要完成机体的动力提供功能,根据起飞重量选择合适的机体架构,本研究需要一定的载荷能力和续航能力。综合情况,机体采用四旋翼的机体结构。机体采用碳纤维材质制作,该材料具有比重小、强度大、抗氧化腐蚀性好、价格适中的特点,能够符合系统对总重量、机体高强度、抗海洋高温、高湿、高盐环境腐蚀等要求。根据预计的机体重量,进行推力需求预估,然后根据对各型盘式无刷电机输出功率曲线的对比最终选择工作电压为14.8V的恒力W42-25 kv610盘式电机,其搭配合适的1447碳纤维桨叶。
电机马达是通过三项电信号进行控制的,飞行控制板解算出的控制信号是小信号,无法推动马达工作,就需要电子调速器这一设备接收飞行控制板的控制信号再控制生成大功率动力电供马达使用。由系统需求,系统采用40A电流400Hz控制频率的电子调速器来保证使用。动力部分采用大容量LiPo电池供电,LiPo电池是目前能量密度较高、安全可靠、技术成熟的电池类型,在各种电动力驱动领域广为使用。
3.2 远程无线数据子系统
远程无线数据子系统主要包括:远程遥控系统、远程数据传递系统、远程图像传递系统。
普通的遥控器的工作距离大多在1km以内,无法满足飞行器的远程飞行控制,因此,选用FUTABA T8FG 2.4G super6208SB型号的遥控器,该遥控器最远工作距离约为5km。
远程数据传递系统(简称“数传”),主要负责将飞行器的各种飞行数据与地面站系统进行数据传递。两者之间的数据传递包括飞行器的飞行姿态、位置、速度、各传感器数据、地面站指令等内容。远程数据传输选用XBEE数传,XBEE模块是采用ZigBee技术的无线模块,通过串口与单片机等设备间进行通信,能够非常快速地实现将设备接入到ZigBee网络的目的,输出功率为250mW。其传输距离可最大可达到45km(28英里)(室外空旷距离)以及高达200kbps的传输速率。
远程图像传递系统,采用专用的动态摄像机,外置三防护具,使得摄像机能够具备防水、抗抖动、抗冲击的能力,通过远程图像传输电台(简称“图传”)与地面站进行图像数据传输。系统采用5.8G的图像传输设备,发射功率为2W,能够满足飞行器的飞行半径内有效图像数据传输。
3.3 飞行控制子系统
飞行控制系统是整个飞行器的关键和灵魂部件,其性能决定了飞行器的最终表现[8]。它实现整个飞行器的无线控制信号接收与发送、各种机载传感器的数据测量与接收、多传感器数据融合姿态控制、位置解算与控制、动力输出控制、各种数据监控与发送等各种功能。
通过对多种商业飞行控制板和开源飞行控制板调研、分析、总结,自行开发一套基于ARM处理器的飞行控制板。由于姿态解算和实时控制需要进行大量的数值运算,并且要求较高的实时性,因此对CPU的性能有较高的要求。根据这一需求采用STM32FI03C8T6芯片作为CPU,该芯片是STM32系列32位ARM处理器,采用了最新型的Cortex-M3内核,在保证高性能运算的同时,还保持了较低的功耗,而且提供了丰富的片内资源,最高提供90MIPS的运算性能,能够满足姿态实时解算的需要。
4 实验
本文设计的系统以多种导航传感器为信息来源,采用改进型的矢量乘性误差PID跟踪算法[9],解算出的导航数据为控制算法提供所需的导航信息,控制算法主要是采用多级PID与ADRC解耦控制算法[10],分别进行半实物仿真实验和原型样机飞行试验。
4.1 半实物仿真实验
为验证算法的可行性同时保障实验样机的安全,需先进行半实物仿真,采用autopilot的硬件系统,进行相应算法的编写,构建硬件在环仿真系统(hardware in loop system,HILS),仿真环境搭建如图2。
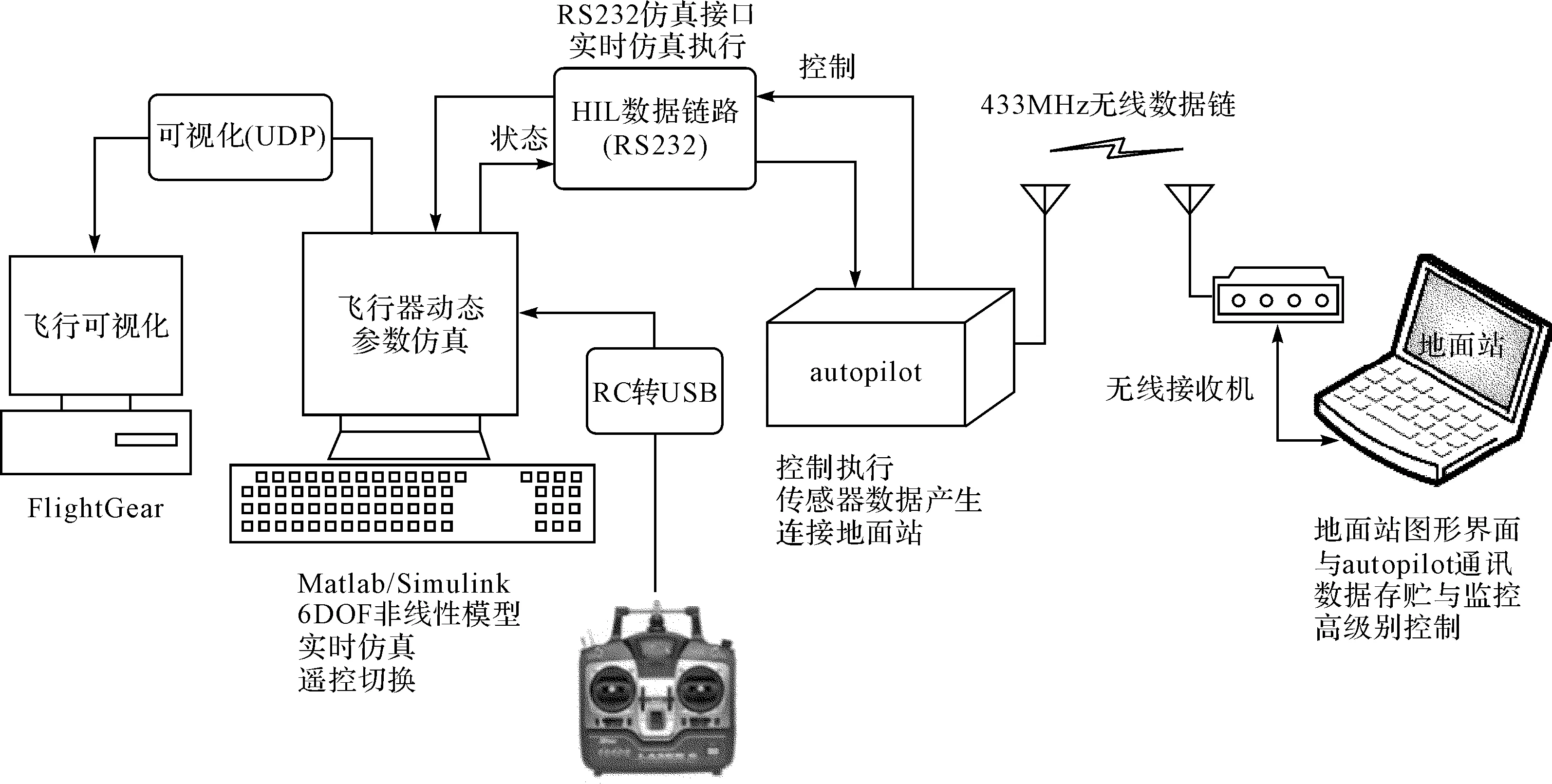
图2 半实物仿真环境
图2中,采用FlightGear、Mission Planner和Matlab构成软件仿真环境,采用两台计算机、autopilot飞控、遥控器、数据传输数据链构成硬件仿真环境。Matlab提供飞行器的6自由度的非线性模型,FlightGear软件提供飞行可视化环境,地面站系统进行飞行器的数据存储和数据交换,autopilot硬件实时提供算法硬件解算环境。采用HIL仿真能够在真实的硬件环境中对所采用的算法进行半实物仿真,仿真中能够实时模拟传感器的采样误差、采样延时、采样噪声,通过一个12bit的AD转换后供autopilot硬件使用。仿真的实验结果如图3所示。从图中可以看出,两曲线之间的误差较小,验证了算法的可行性。
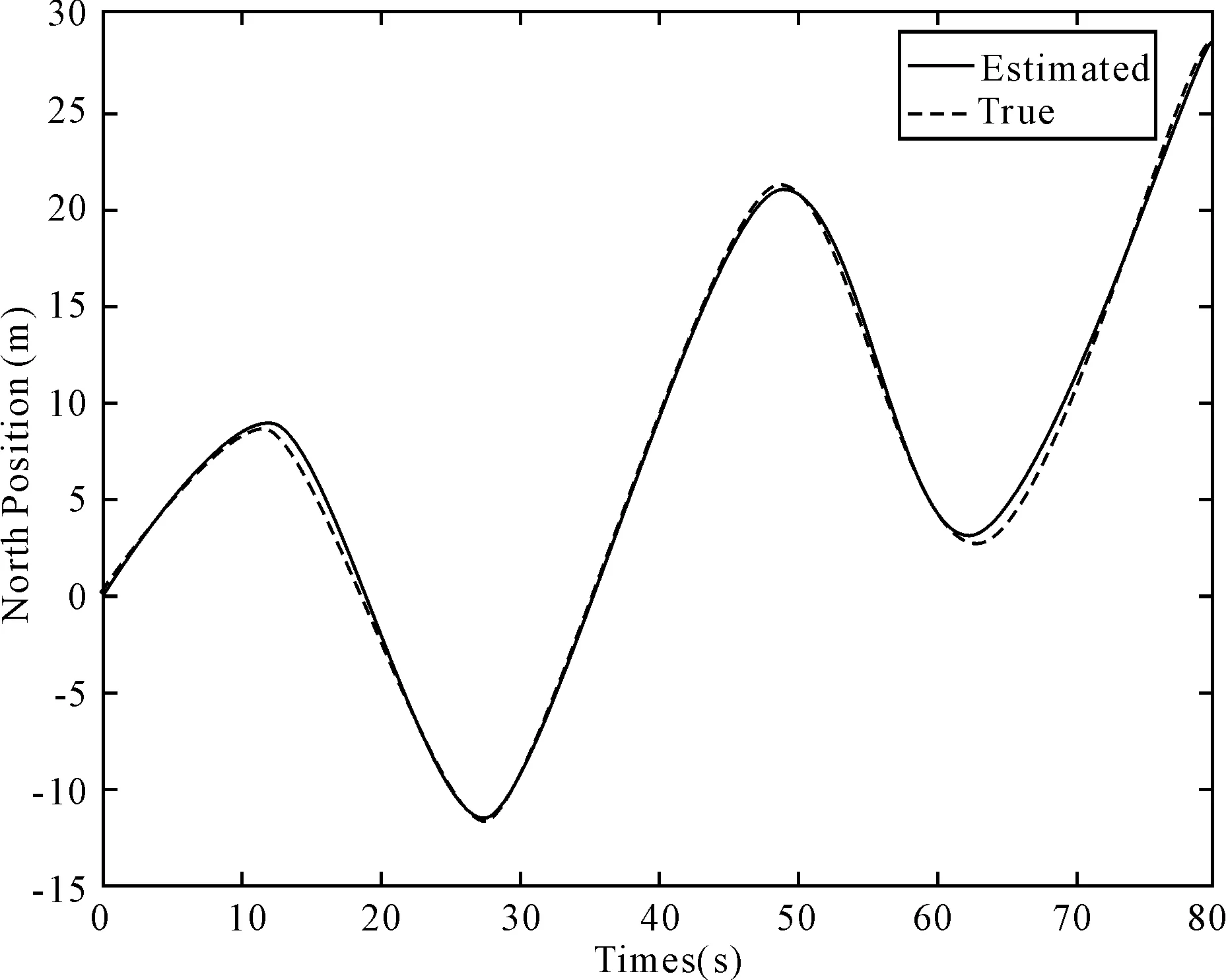
(a)北向位置
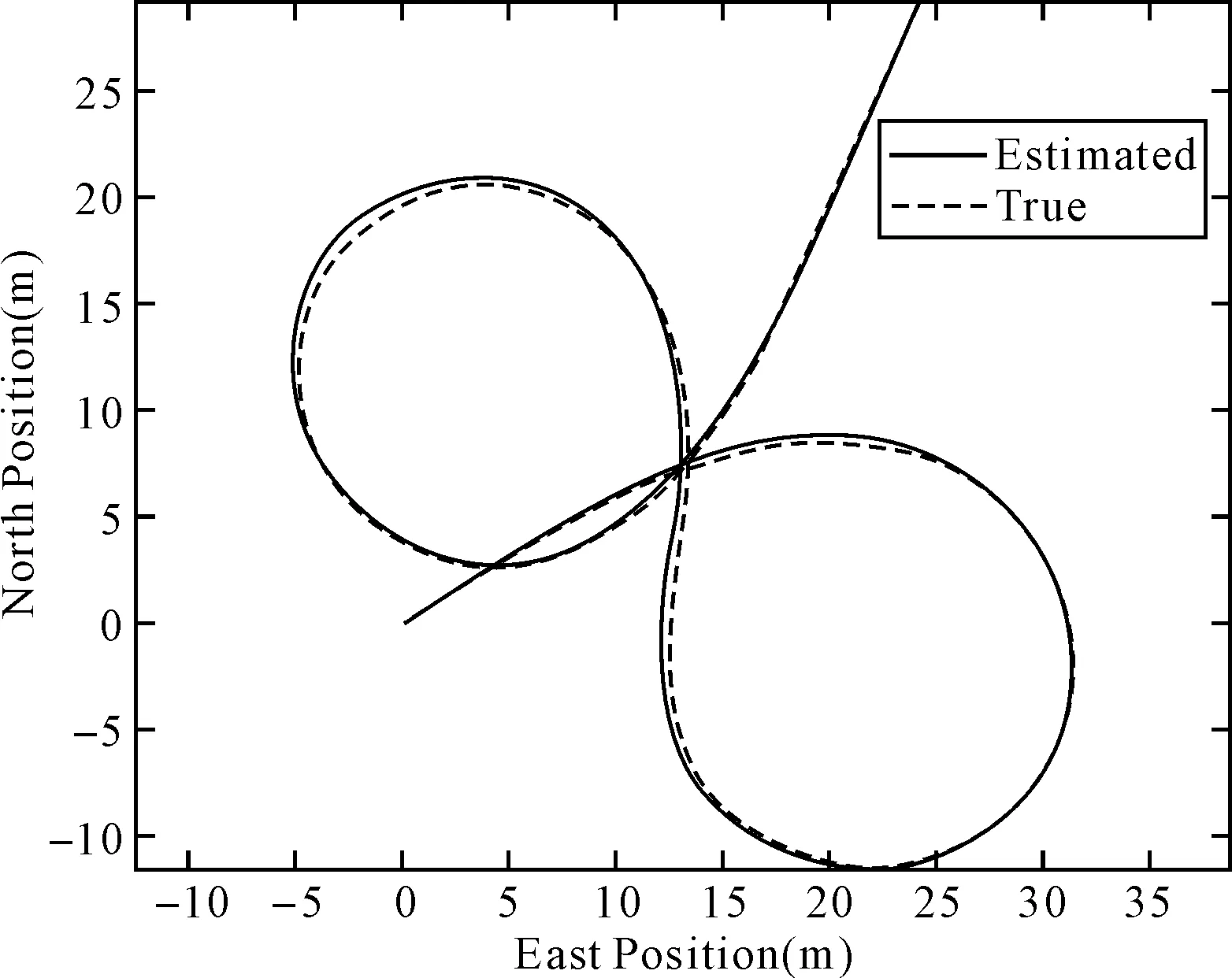
(b)东-北向位置
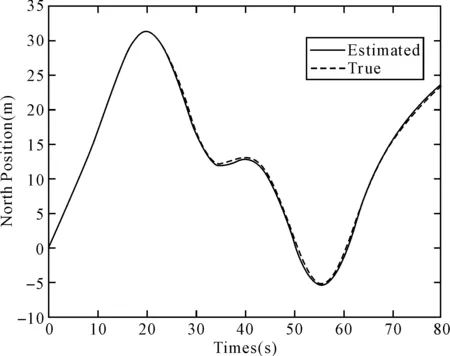
(c)东向位置图3 半实物仿真飞行效果图
4.2 原型样机飞行试验
系统所构建的四旋翼无人机如图4所示。四旋翼样机进行的外场飞行试验:定点悬停测试结果如图5所示,航点规划功能测试结果,如图6所示。

图4 四旋翼原型机

图5 四旋翼原型机飞行效果图
预设了三个航路点,整个航路计划如图中红色曲线所示,飞行器在处于初始位置平稳后,进入航点预设飞行模式,到达最后规划位置后,飞行器处于悬停状态等待下一步操作指示。实际的飞行曲线如图中蓝色曲线。由于存在环境干扰,如风和GPS信号漂移等客观原因,存在一定误差。总体来说所设计的算法能够实现多旋翼无人机的航点飞行功能。
5 结语
本文对多旋翼无人机的应用需求进行了分析,在应用需求与实际产品性能分析的基础上,提出了实验用原型机的技术指标,然后根据技术指标对各个子系统进行了具体的设计,并通过半实物仿真实验和原型样机飞行试验验证了整机各项功能。本文设计的舰用多旋翼飞行器系统可用于未来的战场侦察等作战任务。
[1] 张晓敏.舰载无人机作战使用研究[J].科技信息,2010,3(17):492-494.
[2] 谢奉军,张丹平,黄蕾,等.旋翼无人机专利申请现状与技术发展趋势分析[C]//中国航空学会,2014,6:1233-1236.
[3] 刘浩蓬,龙长江,万鹏,等.植保四轴飞行器的模糊PID控制[J].农业工程学报,2015,1(4):71-77.
[4] 王史春.四旋翼飞行器力学模型与控制系统设计[J].中北大学学报(自然科学版),2014,02(5):218-224.
[5] 赵永亮.新型多旋翼飞行器控制系统设计与实现[D].哈尔滨:哈尔滨工业大学,2015.
[6] 李旭阳.小型多旋翼无人机飞行控制器研究[D].西安:西安电子科技大学,2014.
[7] 李亚文,翟金玲,彭晓邦.一种位置式PID控制的四旋翼飞行器的设计与实现[J].自动化与仪器仪表,2016,7(10):96-100.
[8] 胡锦添,舒怀林.基于PID神经网络的四旋翼飞行器控制算法研究[J].自动化与信息工程,2015,1(3):18-22.
[9] 范崧伟.小型多旋翼AHRS系统矢量误差PI跟踪算法研究[J].海军工程大学学报,2015,10(6):55-59.
[10] 杨立本,章卫国,黄得刚.基于ADRC姿态解耦的四旋翼飞行器鲁棒轨迹跟踪[J].北京航空航天大学学报,2015,41(6):1026-1033.
Design of Multiple Rotor Unmanned Aerial Vehicle System
CHENG Rongtao1MA Heng2WANG Rongying2FAN Songwei2
1. Navy Representative Office in 438 Factory in Wuhan, Wuhan 430060)(2. Department of Navigation Engineering, Naval University of Engineering, Wuhan 430033)
Comparing with other unmanned aerial vehicles, multiple rotor unmanned aerial vehicles have the advantages that it has the ability of vertical take-off and landing and can be controlled easily, thus having great application prospect in military tasks. As a result, this paper designs a system of multiple rotor unmanned aerial vehicle. At first, the design indicators of rotor unmanned spacecraft are presented in this paper. Then according to the design index, the overall design of multiple rotor unmanned aircraft system is carried out. Finally through the simulation experiment and the prototype flight test, the feasibility of the designed system is verified.
multiple rotor unmanned aerial vehicles, design indicators, system design, flight test
2016年10月7日,
2016年11月24日
程荣涛,男,硕士,工程师,研究方向:舰船武备电子。
V249.1
10.3969/j.issn.1672-9730.2017.04.001
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
北京航空航天大学学报(2021年9期)2021-11-02
小哥白尼(军事科学)(2021年4期)2021-07-28
军民两用技术与产品(2021年9期)2021-03-09
作文周刊·小学三年级版(2020年24期)2020-07-17
电子制作(2019年9期)2019-05-30
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
棋艺(2016年4期)2016-09-20
现代计算机(2011年11期)2012-01-09