
基于人工鱼群神经网络的抽油机故障诊断
2017-04-21 05:56邵海龙布兰霞胡明哲付光杰
电气自动化 2017年2期
邵海龙, 布兰霞, 胡明哲, 付光杰
(1.海洋石油工程股份有限公司,天津 300451;2.中国石油大庆炼化分公司,黑龙江 大庆 163318;3.东北石油大学 电气信息工程学院,黑龙江 大庆 163318)
基于人工鱼群神经网络的抽油机故障诊断
邵海龙1, 布兰霞2, 胡明哲3, 付光杰3
(1.海洋石油工程股份有限公司,天津 300451;2.中国石油大庆炼化分公司,黑龙江 大庆 163318;3.东北石油大学 电气信息工程学院,黑龙江 大庆 163318)
BP神经网络应用于抽油机的故障诊断时易陷入局部极值,同时收敛速度也无法保证。在此前提下,提出人工鱼群神经网络算法的抽油机故障诊断新方法,充分利用人工鱼群在全局范围的快速寻优特性以克服BP神经网络收敛速度较慢和易陷入局部最优解的缺点,从而提高故障诊断的准确率和速度。以抽油机的管漏、供液不足、杆断脱、泵漏失、气影响五种故障类型为例,利用MATLAB分别搭建了传统BP神经网络和人工鱼群神经网络的模型,并对两种方法的诊断结果进行了比较。仿真结果充分说明了人工鱼群神经网络在抽油机故障诊断中的可行性、准确性和优越性。
抽油机故障诊断; 人工鱼群算法; BP神经网络;人工鱼群神经网络; 仿真验证
0 引 言
由于抽油机等采油设备多分布于较偏远的野外作业区,不仅分布分散而且所处周边环境恶劣,致使人工检测相对困难[1]。若不能及时有效地检测并诊断抽油机的故障类型,将对生产产生巨大影响,同时对于实现油田数字化和自动化具有重要意义[2]。抽油机故障诊断的建模过程较为复杂,其工程问题多涉及非线性问题的求解。因此需寻求一种适合于大规模复杂工程并具有智能特征的全局寻优算法[3]。人工鱼群算法(Artificial Fish Swarm Algorithm,AFSA)以其出色的全局寻优、快速跟踪,以及对初值、参数选择的变化不敏感等特性不断被应用于数值计算、信号处理等复杂工程领域[4]。
1 人工鱼群算法原理

1.1.1 觅食行为
觅食行为是人工鱼通过视觉、嗅觉和味觉进行水域食物浓度感知与判断的基本行为。设某人工鱼i的当前状态为Xi,在其感知范围内选择另一状态Xj,Xj表达式如(1)所示。
Xj=Xi+Visual·Rand()
(1)
(2)
反之,重新选择状态Xj并判断是否满足前进条件。若进行Try_number次后仍不满足则随机地进行移动,此时表达式如式(3)所示。
(3)
1.1.2 群聚行为
作为躲避危害,确保群体生存的重要生活习性,群聚行为广泛存在于鱼类、鸟类等种群。在人工鱼群算法的任意人工鱼都需满足避免过度拥挤的前提下尽可能地游向邻近人工鱼中心的条件。体现在数学模型上,即选取的当前状态为Xi的人工鱼在(dij
(4)
1.1.3 追尾行为
鱼群在寻找食物时,若其中一条鱼发现食物,其邻近的个体也会接受到相应信息而尾随至食物所在中心。从智能算法角度出发,可将其理解为追尾行为是一种向邻近的有着最高适应度的人工鱼追逐的行为。仍设人工鱼i的当前状态为Xi,邻域dij
(5)
1.1.4 随机行为
随机行为,顾名思义,就是人工鱼在视野范围内随机选择一个状态并向该方向游动,可将其视为觅食行为的一个缺省行为[8]。虽然鱼是自由地在水中游动,但其每一次游动方向的选择都是为了寻找邻近的伙伴或寻找高浓度食物的水域。因此在应用人工鱼群算法解决优化问题时,存在两种行为评价标准:最优行为和较优方向。最优行为是指在当前状态下选择向最优方向前进最大的行为;而较优方向是在满足可向优的目标方向前进的所有行为中任意选择一种行为。
总之,以颐和园和凡尔赛宫为例,中西方皇家园林在轴线的造园手法上确实存在着很大的差异性,不管是在宫廷区还是在园林区。从政治美学的视角看,这与二者不同背景下的政治文化意蕴有关,中国的皇家园林要立足于儒家的礼制文化,兼之统治者对江南园林的喜爱,在宫廷区要符合礼制的要求,在园林区则是要满足统治者对自然山水的追求。西方的皇家园林则是与唯理主义的意识形态有关,并且要满足统治者集权的要求,不论是在宫廷区还是在园林区都要用轴线布局来强调理性,以及统治者统摄一切的权威。
2 人工鱼群BP神经网络算法的实现
2.1 基本思想
为弥补BP神经网络的网络结构需通过不断尝试才能确定以及因采用梯度下降法而易陷入局部最优解的不足,采用人工鱼群神经网络(Artificial Fish Swarm Algorithm-Neural Network,AFSA-NN)优化BP神经网络的权值和阈值的选取。以三层BP神经网络为例,设定神经网络的输入层节点数、输出层节点数、隐含层节点数分别为I、J、K,输入层神经元i与隐含层神经元j之间的连接权值为vij,隐含层神经元阈值为μj,输出层神经元k与隐含层神经元j之间的连接权值设为wjk,并令θk为输出层神经元k的阈值。将上述变量vij,μj,wjk,θk设定为人工鱼算法进行寻优的参数,则任意一条人工鱼状态可如式(6)所示。
X=X(v11,…,vI1,μ1,…,v1J,…vIJ,μJ,…,w11,…,wI1,θK)
(6)
其中v11,…,vI1,μ1是输入结点到第一个隐含层结点的权值和第一个隐含层结点的阈值,v1J,…vIJ,μJ是输入结点到第J个隐结点的权值和第J个隐结点的阈值,w11,…,wI1,θK是隐结点到第K个输出结点的权值和第K个输出结点的阈值。
2.2 算法实现
人工鱼群神经网络流程图如图1所示。由流程图可知,人工鱼群神经网络的建立分为以下三个步骤:
(1)建立BP神经网络
在抽油机故障诊断过程中共选取6组不同工况下的示功图,并利用矩特征傅里叶描述后得到相应的描述子。定义神经网络的输入层神经元、输出层神经元以及隐含层个数。
(2)在BP神经网络进行训练时,通过人工鱼群算法对神经网络算法的权值和阈值进行优化。具体步骤如下:
Step1,人工鱼群的规模设定,并对各项参数赋值。
Step2,在Visual内随机生成所设定规模的人工鱼群,该过程将产生N个具有相投结构的BP神经网络,并计算每个神经网络的适应度,通过比较得出适应度最小的人工鱼个体并将其记录在公告牌内。
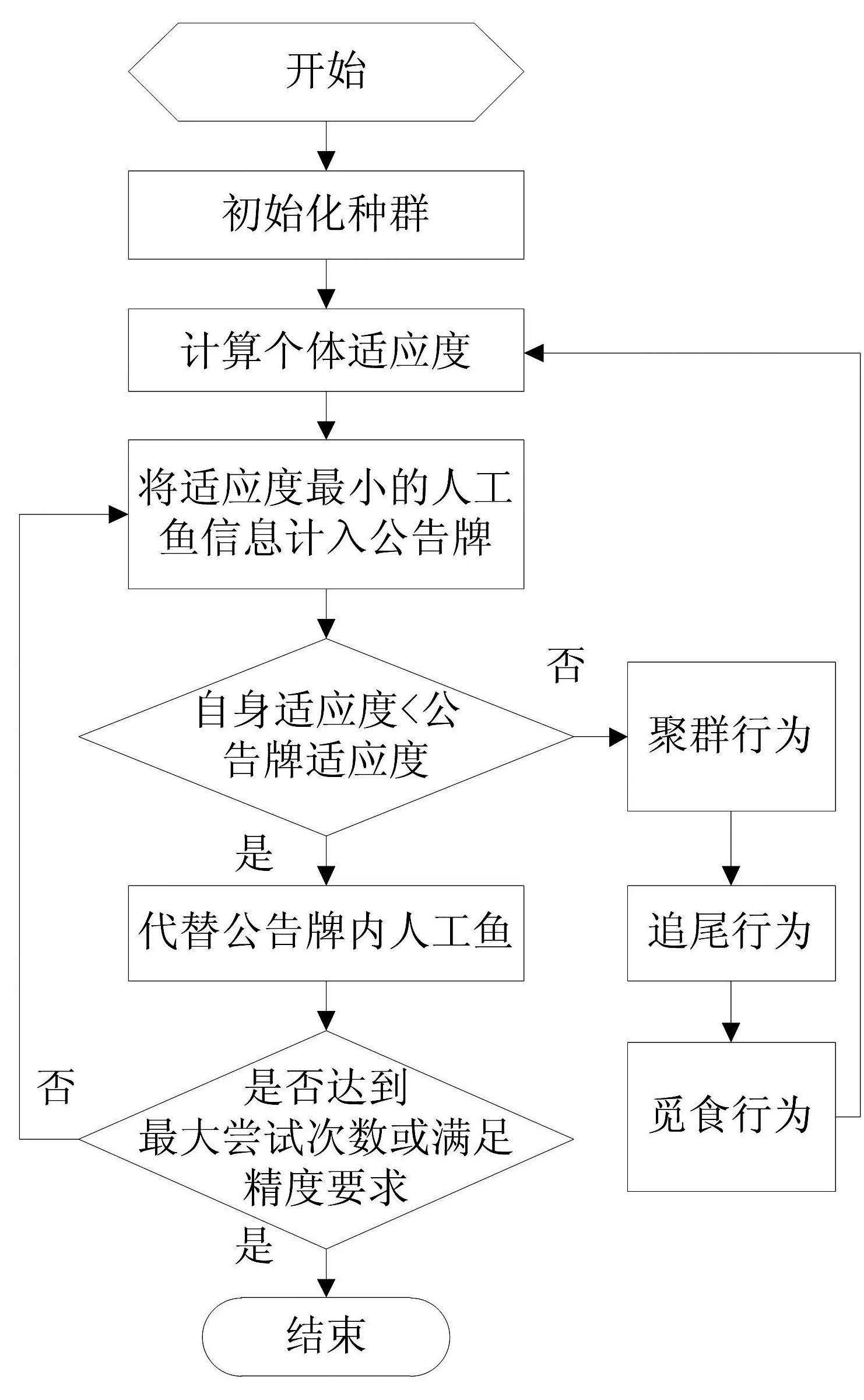
图1 人工鱼群神经网络流程图
Step3,判断自身适应度是否小于公告牌中记录的适应度,若小于则将公告牌中的信息更新为该人工鱼状态。若不满足判断条件,则以较优方向的原则选择适应度较小的人工鱼进行追尾、聚群和觅食行为。
Step4,判断算法是否已达到最大尝试次数或所得最优解是否满足精度要求。若是则进入Step5,否则返回Step3。
Step5,算法运行结束,把公告板所记载的人工鱼个体信息中权值和阈值输出,该结果即为BP神经网络的最优权值与阈值。
(3)利用步骤(2)中所得的权值和阈值训练神经网络,检验并提高AFSA-NN算法在抽油机故障诊断中的准确率和速度。
3 仿真验证与分析
为充分验证AFSA-NN在抽油机故障诊断中的准确性和可靠性,特选取抽油机示功图对管漏、供液不足、杆断脱、泵漏失、气影响五种故障进行诊断。仿真过程中以AFSA-NN为诊断模型,分别选取故障特征和故障原因作为输入层、输出层节点。以原有的故障信息为样本空间,抽油机示功图描述子作为神经网络待训练的样本。通过训练学习确定网络结构并对抽油机的不同故障类型进行诊断。本文采用6-7-6的三层神经网络,人工鱼群算法的参数设定上选取人工鱼群规模为N=30,人工鱼移动的最大步长Step=0.9,人工鱼视野Visual=10,拥挤度因子δ=0.8,尝试次数Try_number=50。在MATLAB平台上分别对传统BP神经网络和人工鱼群BP神经网络算法进行模型搭建,两种方法的训练结果分别如表1和表2所示。
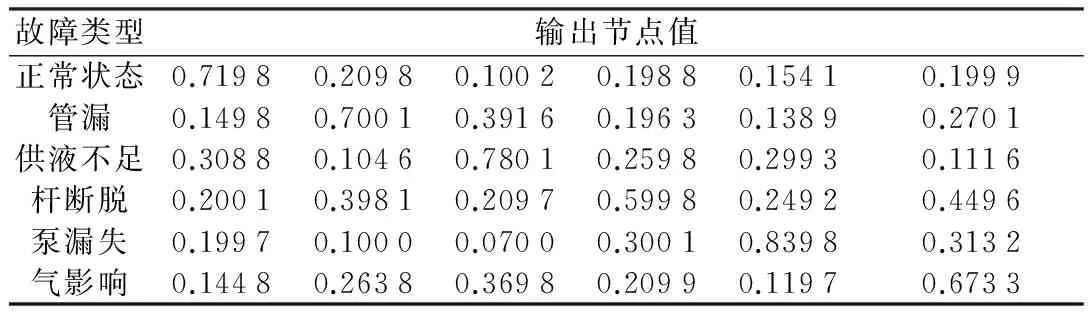
表1 原始BP网络输出节点值
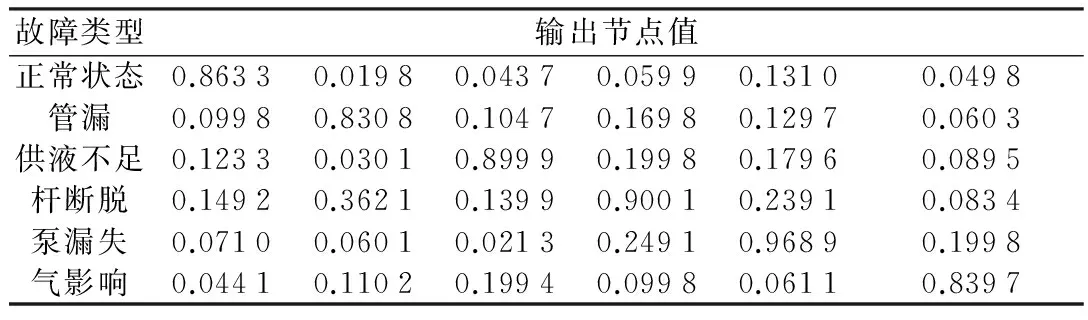
表2 人工鱼群BP神经网络输出节点值
若将仿真在结果中的数据进行近似处理,即输出节点值大于等于0.5时取为1,小于0.5则按0处理,那么从表1和表2可知,当抽油机处于正常工况时,输出节点值为(1,0,0,0,0,0),管漏、供液不足、杆断脱、泵漏失、气影响五种常见故障的输出节点值分别为(0,1,0,0,0,0)、(0,0,1,0,0,0)、(0,0,0,1,0,0)、(0,0,0,0,1,0)、(0,0,0,0,0,1)。对比两种算法的故障诊断结
果可知,基于人工鱼群BP神经网络算法对抽油机示功图分析后所得的故障诊断结果具有更高的精度和可靠性。将两种算法进行多次的仿真验证表明人工鱼群BP神经网络算法的故障诊断准确率可达93.8%,远高于传统BP神经网络算法87.4%的准确率,且人工鱼群BP神经网络算法的训练时间也较短。
4 结束语
本文将人工鱼群算法与传统BP神经网络算法相结合,提出人工鱼群BP神经网络算法,并将其应用于抽油机示功图故障诊断。该方法充分利用人工鱼群对神经网络权值和阈值的进行优化,克服传统BP神经网络易陷入局部极值、收敛速度慢的缺点。仿真结果充分说明人工鱼群BP神经网络算法在抽油机故障诊断过程中体现出的优越性。
[1] 谢汝兵,杜娟,葛卫京.基于改进BP神经网络的机械故障研究[J].机械工程与自动化, 2013,42(5): 119-121.
[2] 张强,许少华,李盼池.基于量子蛙跳算法和过程神经网络的抽油机故障诊断[J]. 中国机械工程, 2014,25(12): 1609-1615.
[3] NESHAT M, SEPIDNAM G, SARGOLZAEI M, et al. Artificial fish swarm algorithm: a survey of the state-of-the-art, hybridization, combinatorial and indicative applications[J]. Artificial Intelligence Review, 2014,42(4): 965-997.
[4] 陈安华,周博,张会福,等.基于改进人工鱼群算法的机械故障聚类诊断方法[J].振动与冲击, 2012,31(17): 145-148.
[5] 赵丽虹,范敬柱.量子鱼群算法优化RBF网络的浮选预测模型[J].辽宁科技大学学报, 2015,38(1): 46-50.
[6] 李媛.基于人工鱼群算法的多元线性回归分析问题处理[J].渤海大学学报(自然科学版), 2011,32(2): 168-171.
[7] 利用人工鱼群算法对光纤陀螺随机漂移建模[J].中国惯性技术学报, 2012,20(3): 358-362.
[8] 张颖.基于改进鱼群算法的BP神经网络优化研究[D].广州:华南理工大学, 2012.
Fault Diagnosis of Oil Pumping Machines Based on Artificial Fish Swarm Neural Network
Shao Hailong1, Bu Lanxia2, Hu Mingzhe3, Fu Guangjie3
(1.Offshore Oil Engineering Co., Ltd., Tianjin 300451, China;2. PetroChina Daqing Refining and Chemical Branch, Daqing Heilongjiang 163318, China;3. College of Electrics and Information Engineering, Northeast Petroleum University, Daqing Heilongjiang 163318, China)
BP neural network, when applied to fault diagnosis of oil pumping machines, will easily fall into local extremum, and convergence speed cannot be guaranteed. Under this premise, a new fault diagnosis method for oil pumping machines is presented on the basis of artificial fish swarm neural network algorithm to make full use of the algorithm’s fast optimizing character on the global scope to overcome the shortcomings of BP neural network: slow convergence rate and likeliness to fall into locally optimal solution, thus improving the accuracy and speed of fault diagnosis. Taking five fault types (tube leakage of pumping machine, insufficient feed liquid, stem break-off, pump leakage and gas impact) as example, this paper uses Matlab to establish a model for traditional BP neural network and a model for artificial fish swarm neural network, and compares diagnosis results of these two methods. Simulation results sufficiently prove the feasibility, accuracy and superiority of artificial fish swarm neural network used for fault diagnosis of oil pumping machines.
oil pumping machine fault diagnosis;artificial fish swarm algorithm;BP neural network;artificial fish swarm neural network;simulation verification
10.3969/j.issn.1000-3886.2017.02.008
TP277
A
1000-3886(2017)02-0026-03
邵海龙(1983-),男,黑龙江肇东人,主要从事仪表控制与选型设计研究工作。 布兰霞(1966-),女,黑龙江大庆人,主要从事抽油机故障诊断研究工作。 胡明哲(1994-),男,黑龙江大庆人,硕士,研究方向为电力电子与电力传动。 付光杰(1962-),女,博士,黑龙江龙江人,研究方向为电力电子技术及应用。
定稿日期: 2016-09-15
猜你喜欢
石油石化节能(2022年12期)2022-12-30
设备管理与维修(2022年21期)2022-12-28
电子制作(2022年1期)2022-01-28
电子制作(2021年14期)2021-08-21
中外文摘(2017年19期)2017-10-10
计算机测量与控制(2017年6期)2017-07-01
中国篆刻·书画教育(2017年5期)2017-06-08
电测与仪表(2016年20期)2016-04-11
湖南大学学报·自然科学版(2014年3期)2014-12-30
中国煤层气(2014年6期)2014-08-07
