
基于自抗扰控制技术的多电机同步控制
2017-04-21 05:56张羽关振宏王涛杜平孟一
电气自动化 2017年2期
张羽,关振宏,王涛,杜平,孟一
(西南交通大学 磁浮技术与磁浮列车教育部重点实验室,四川 成都 610031)
基于自抗扰控制技术的多电机同步控制
张羽,关振宏,王涛,杜平,孟一
(西南交通大学 磁浮技术与磁浮列车教育部重点实验室,四川 成都 610031)
对采用偏差耦合控制策略的永磁同步电机多电机同步控制进行仿真研究。引入自抗扰控制技术实现电机控制,各同步控制器的输出补偿负载转矩。考虑到电机实际运行中参数随温度发生变化,为进一步提高转速同步控制性能,采用模型参考自适应算法对电机参数进行在线辨识,结果用于在线修正自抗扰控制器结构参数。从理论上分析了扰动引起的误差收敛情况,仿真结果验证了整体方案的可行性,可以实现4台永磁同步电机的转速同步控制。
永磁同步电机;转矩补偿;参数辨识;误差收敛;在线修正
0 引 言
在工业生产和日常生活等领域,多电机同步控制策略一直是高精度、高转速传动系统中的核心问题。偏差耦合控制在三台及以上的多电机同步控制中有着广泛的应用,为达到更好的同步性能指标,研究人员对此控制策略进行一系列改进如:利用智能算法模糊控制[1]、神经元算法[2]等对同步控制器中的PI进行改进,利用自适应前馈控制[3]、反演控制[4]、内膜控制[5]、滑模变结构控制[6]等先进控制策略实现同步控制算法,以消除电机输出转速与给定转速间的误差。这一系列的改进措施可以实现良好的控制性能,但利用改进的同步控制器进行交轴电流补偿对最终同步性能的提高效果不明显,而采用先进控制策略实现同步控制算法未考虑电机运行过程中电机参数变化带来的影响。为实现更好的转速同步性能,本文采用自抗扰控制技术实现电机转速控制,同步控制器输出对电机转矩进行补偿,同时考虑电机运行过程中定子电阻、交直轴电感、磁链随温度发生变化,转动惯量随负载发生变化。文献[7]对采用自抗扰控制技术的永磁同步电机矢量控制方案进行转动惯量辨识,本文将考虑电机实际运行过程中电机参数随温度发生的变化,利用模型参考自适应控制方法对电阻、电感、转动惯量进行在线辨识,将辨识结果反馈给自抗扰控制器,通过仿真对整体方案进行验证。仿真中主要考虑三方面扰动影响:转矩扰动、电机参数扰动、掉电故障。
1 算法描述
1.1 自抗扰控制器
自抗扰控制技术通过跟踪微分器TD解决了快速性和超调量之间的矛盾,同时采用的预测+补偿模式,可以处理各种非线性、时变、不确定等一系列复杂问题。TD用于安排输入信号的过渡过程和提取其微分信号,其离散形式为[8]:
fh=fhan(v1-v0,v2,r0,h)
v1=v1+hv2
v2=v2+hfh
v0为需要安排过渡过程的信号,v1为其跟随信号,v2为其微分信号。
扩张状态观测器ESO用于观测系统的状态变量,离散型线性扩张状态观测器为:
e=z1-y
z1=z1+h(z2-β11e)
z2=z2+h(-β12e)
(1)
y为系统输出量,z1、z2分别为状态量和扰动量估计值。
非线性误差补偿NLSEF部分采用非线性组合,补偿系统扰动项:
e1=v1-z1
1.2 永磁同步电机模型
永磁同步电机控制结构如图1所示,采用id=0 控制方案,永磁同步电机控制方程为:
也可表示为:
(2)
x1=x2+b2u
(3)
Γ=s3+(β21+β11)s2+(β21β11+β12)s+β21β12
选取β21=P,β11=2P,β12=P2
(4)
可以将系统特征方程配置成Γ=(s+P)3,即外环带宽为P,同理适用于电流内环。按照此比例构造自抗扰控制器控制参数。
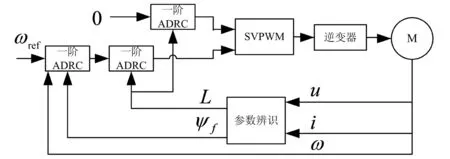
图1 电机控制结构
1.3 多电机偏差耦合控制
偏差耦合控制结构如图2所示,各同步控制器输入3个信号,即本电机的速度反馈和相邻两电机的转速。最终目的是消除本电机转速与相邻两电机转速之间的偏差:
通过对速度差的比例积分可得到电机的电磁转矩,而利用电机间的转速差值产生的转矩直接补偿各电机的转矩项在物理意义上更为直观。
Te=k1(ωref-ω)+k2∫(ωref-ω)
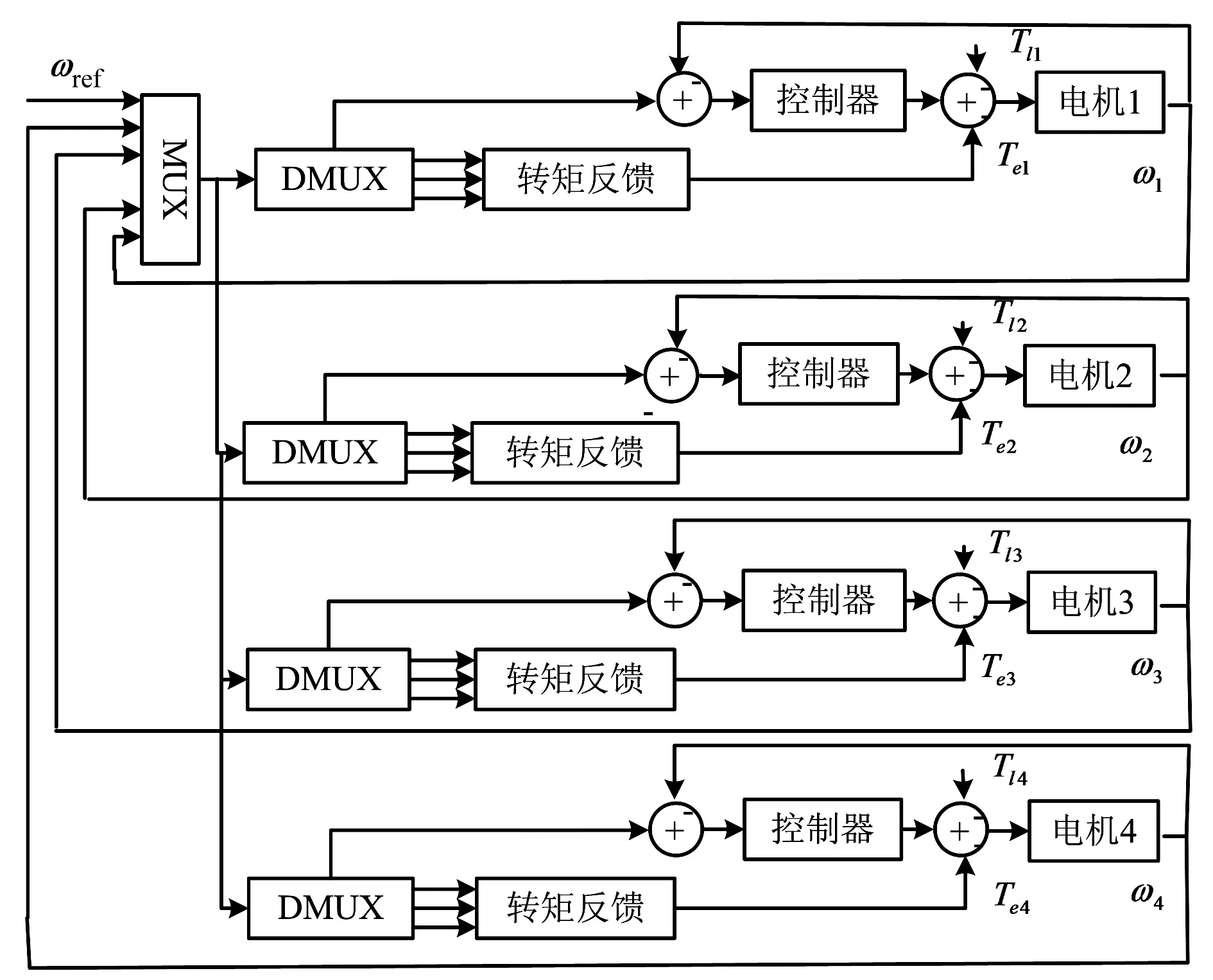
图2 偏差耦合控制结构
1.4 电机参数在线辨识
电机在实际运行过程中随着温度的升高,电阻、电感会增大,磁链会减小。电机参数在线辨识方面:最小二乘法、卡尔曼滤波、模型参考自适应[10]等一系列在线辨识策略各有优缺点。基于电机参数辨识后需要与自抗扰控制器结合的要求,选择辨识精度高、算法复杂度适中的模型参考自适应进行参数在线辨识,由永磁同步电机状态方程构造参考模型。
由波波夫超稳定理得到各电机参数辨识公式如下:
2 仿真分析
2.1 仿真参数
电机1额定转矩6 N·m,额定转速4 500 r/min,额定直流母线电压300 V,电机极数4。以1号电机为原型机,其余电机参数在电机1的基础上,考虑电阻增加20% 以内,电感增加10%以内,磁链降低8% 以内变化,各电机参数如表1所示。


表1 电机参数

表2 抗扰控制器参数
2.2 仿真波形
负载扰动和掉电故障情况下的电机输出波形:四台永磁同步电机各电机起始给定为300 rad/s,6 N,0.1s 时2号电机发生负载扰动,负载增加到14 N 。0.3 s时3号电机发生掉电故障,直流电压由300 V降为225 V,0.4 s 时刻直流母线电压恢复。0.5 s 时刻电机给定转速由300 rad/s 变为-300 rad/s 。电机间同步转速误差最大发生在2号、4号电机间(Δω24)和3、2号电机间(Δω32)。同步转速误差误差比≤0.016 7%。图5中2号电机在增加8 N 负载扰动瞬间每台电机将平均增加2 N左右的转矩。图6在转矩扰动发生瞬间,四台电机参考电流几乎一致。仿真波形如图3所示。
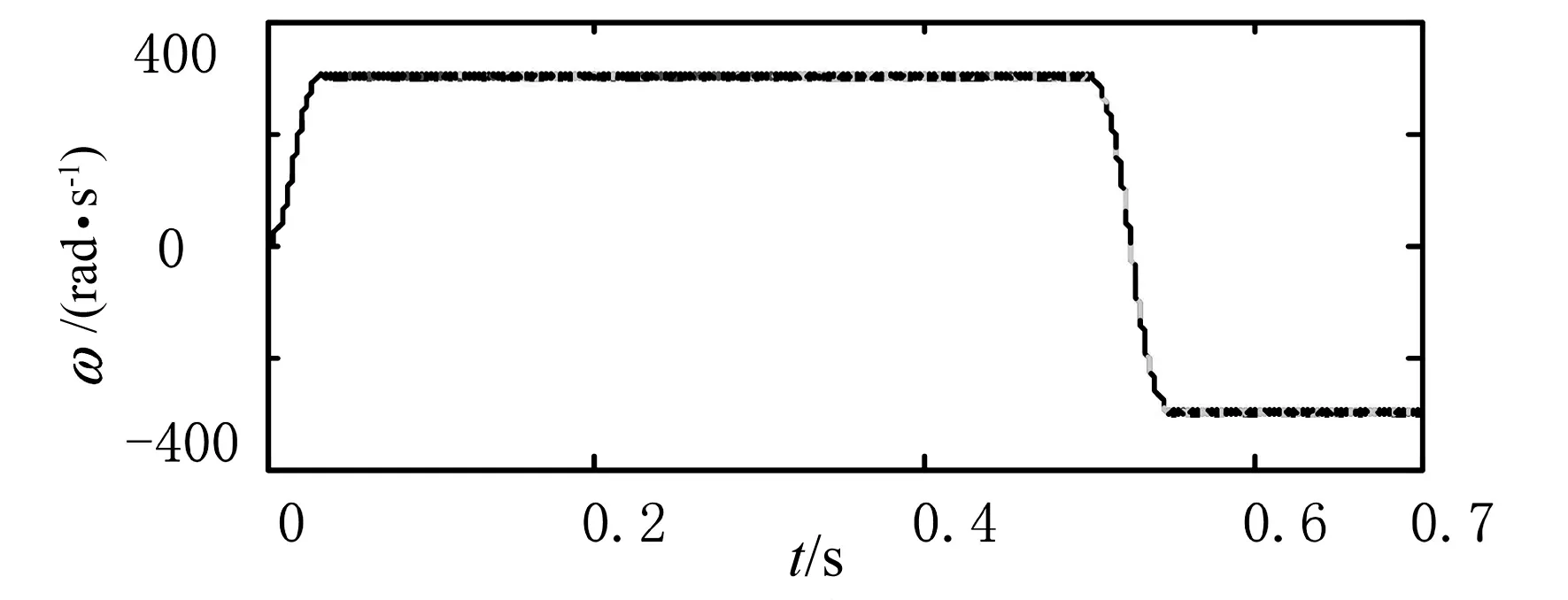
图3 电机输出转速
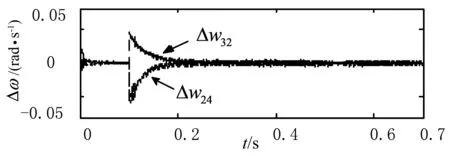
图4 电机间转速差
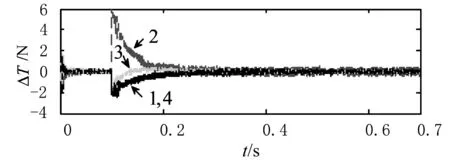
图5 各电机补偿转矩
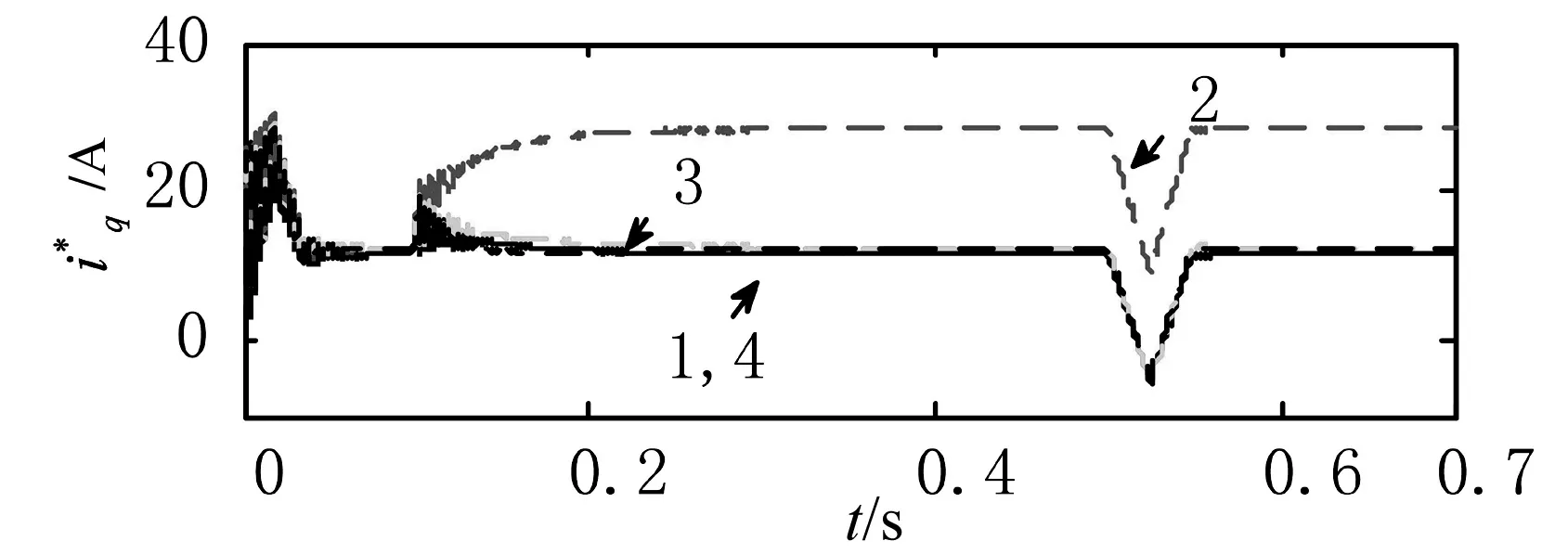
图6 电机参考交轴电流
参数扰动情况下的参数辨识波形:以电机1为例,参数发生改变情况下的辨识结果如图7~9所示。虚线为给定值,实线为辨识值,其中电阻辨识误差≤2.5%,电感辨识误差≤0.2%,磁链辨识误差≤0.3%。

图7 电阻辨识
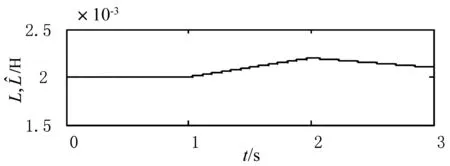
图8 电感辨识

图9 磁链辨识
3 结束语
整体控制方案可以实现负载扰动、掉电故障、参数扰动三种主要扰动情况下的永磁同步电机输出转速同步的目的。方案中考虑到了电机实际运行中因温升引起参数变化情况,采用自适应控制算法在线辨识电机主要参数可以达到电机参数精确辨识的要求,将辨识结果用于在线调整自抗扰控制器结构参数,提高了自抗扰控制器的控制性能和系统的鲁棒性。
[1] 李平. 基于模糊PID的多电机同步控制[D].沈阳:东北大学, 2010.
[2] 刘艳. 多电机同步控制系统控制策略研究[D]. 沈阳:沈阳工业大学, 2013.
[3] MOCHIZUKI K, MOTAI T. Synchronization of two motion control axes under adaptive feedforward control[J]. Journal of Dynamic Systems Measurement & Control, 1992, 114(2):196-203.
[4] 范志龙. 基于永磁同步电机的多电机同步控制系统的研究[D]. 湖南:湖南大学, 2012.
[5] LI S, GU H. Fuzzy adaptive internal model control schemes for PMSM speed-regulation system[J]. IEEE Transactions on Industrial Informatics, 2012, 8(4):767-779.
[6] 姜晓平, 朱奕, 伞冶. 大功率随动试验台多永磁同步电机同步控制[J]. 电机与控制学报, 2014,53(4):88-95.
[7] CHEN H, XU H, LIU B, et al. The compensated active disturbance rejection controller based on sliding mode control for PMSM[C]//IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems. IEEE, 2015.
[8] 韩京清. 自抗扰控制技术: 估计补偿不确定因素的控制技术[M]. 北京:国防工业出版社, 2008.
[9] 左月飞, 李明辉, 张捷,等. 控制增益对永磁同步电动机自抗扰控制性能的影响[J]. 电工技术学报, 2016, 31(3):58-65.
[10] 严洪峰.永磁同步电机参数在线辨识算法研究[D].哈尔滨:哈尔滨工业大学,2015.
Multi-motor Synchronous Control Based on Active Disturbance Rejection Control Technique
Zhang Yu, Guan Zhenhong, Wang Tao, Du Ping, Meng Yi
(Key Laboratory of the Ministry of Education for Maglev Technology and Maglev Train, Southwest Jiaotong University, Chengdu Sichuan 610031, China)
Based on a simulation of multi-motor synchronous control over permanent magnet synchronous motors adopting deviation coupling control, this paper uses active disturbance rejection technique to achive motor control, whereby the outputs of synchronous controllers compensate for load torque. Considering the fact that motor parameters change with temperature during its operation, in order to improve the speed synchronization control performance, we use the model reference adaptive algorithm to achieve online identification of motor parameters, and apply the result for online correction of the structure parameters of the adaptive disturbance rejection controller. This paper analyzes theoretically error convergence caused by disturbance. Simulation results verify the feasibility of the total scheme. Using this control strategy, one can achieve speed synchronization control over four permanent magnet synchronous motors.
permanent magnet synchronous motor;torque compensation; parameter identification; error convergence; online correction
10.3969/j.issn.1000-3886.2017.02.003
TM921
A
1000-3886(2017)02-0009-03
张羽(1992-),男,辽宁盘锦人,硕士生,研究方向为电力电子与交流传动。 关振宏 (1967-),男,湖南常德人,硕士生导师,副教授,研究方向为电力牵引与传动控制。 王涛(1972-),男,四川乐山人,硕士生导师,副教授,研究方向为交流传动技术,计算机控制技术。 杜平(1992-),男,四川广安人,硕士生,研究方向为电力电子与交流传动。孟一 (1993-),男,河南商丘人,硕士生,研究方向为电力电子与交流传动。
猜你喜欢
防爆电机(2022年3期)2022-06-17
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年2期)2021-06-09
防爆电机(2020年6期)2020-12-14
制造技术与机床(2017年2期)2017-05-04
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
郑州大学学报(理学版)(2013年2期)2013-03-11
