多金属结核概念车浮游体的外形设计及阻力特性分析
2017-04-21 03:33:24冯冠华李智刚冯迎宾梁洪光程阳锐吴东华
海洋学研究 2017年1期
冯冠华,李智刚,冯迎宾,梁洪光,程阳锐,吴东华
(1. 沈阳理工大学 机械工程学院,辽宁 沈阳 110159;2. 中国科学院 沈阳自动化研究所 机器人学国家重点实验室,辽宁 沈阳 110016;3. 长沙矿治研究院有限责任公司 深海矿产资源开发利用技术国家重点实验室,湖南 长沙 410012)
多金属结核概念车浮游体的外形设计及阻力特性分析
冯冠华1,李智刚*2,冯迎宾2,梁洪光2,程阳锐3,吴东华3
(1. 沈阳理工大学 机械工程学院,辽宁 沈阳 110159;2. 中国科学院 沈阳自动化研究所 机器人学国家重点实验室,辽宁 沈阳 110016;3. 长沙矿治研究院有限责任公司 深海矿产资源开发利用技术国家重点实验室,湖南 长沙 410012)
针对深海采矿实际需求,提出将集矿车上的液压站与集矿车分离,设计成相对独立、悬浮于集矿车前部上方的浮游体。设计了多金属结核概念车浮游体(以下简称浮游体)外形,并利用三维设计软件SolidWorks建立了其三维几何模型。在此基础上,对几何模型进行简化处理,建立了浮游体流体动力学计算模型。利用流体动力学仿真分析软件ANSYS CFX,采用雷诺时均算法(RANS算法)和两方程的k-ε湍流模型,得到了不同工况的阻力数据。采用Matlab曲线拟合功能,研究了浮游体阻力特性,验证了外形设计方案的可行性。
深海采矿;浮游体外形;流体动力学仿真分析;阻力特性
0 引言
随着陆地矿产资源的逐渐枯竭和人类对金属资源需求的日益增加,海底矿产必将成为21世纪的重要资源[1]。但是这些海底矿产大都存在于深海,必须依靠深海采矿装备——集矿车对其进行开发,集矿车设计的好坏将直接影响深海采矿的成败。在深海采矿过程中,集矿车要具有适应深海恶劣环境和海底地貌变化、连续无故障作业、越障越沟、保证采集率和不给深海生态环境带来过度破坏等能力[1-3]。
液压站是集矿车的重要组成部分,其在整个车体中的具体位置如何布置,并不影响其功能的实现。但液压站的体积和重量较大,会影响集矿车整体布局,增加整车重量,使集矿车结构复杂化,拆卸维修困难,且增加整车能耗。另外,液压站工作时会产生强烈震动,严重影响集矿车导航控制系统的正常工作。
本文正是综合考虑以上因素,提出将液压站从集矿车中分离出来,将液压站设计成一个相对独立于集矿车、悬浮于集矿车前部上方的浮游体。采用悬浮液压站技术,一方面能缩小集矿车体积、减轻整车重量,便于集矿车整体优化布局,提高其在海底稀软底质上的行走能力;另一方面浮游体作业时悬浮于集矿车的前部上方,能有效扩展监控范围,保证集矿车作业过程的安全。本文借助计算流体动力学仿真分析软件ANSYS CFX对浮游体的阻力特性进行了数值仿真研究。
1 浮游体外形设计
多金属结核概念车浮游体(以下简称浮游体)主要组成部分包括:水下电机、液压泵、储油舱、补偿器、推进器、电子舱、框架、摄像机及其他传感器等。先根据集矿车对液压系统的具体需求,确定液压站尺寸、重量等参数。再根据对浮游体的作业深度、巡航速度、承载能力、总重量和最大尺寸范围等参数的具体要求,设计浮游体的各部分外形并整体布局,确保满足其所需要的运动能力和稳定性[4]。设计的多金属结核概念车浮游体参数为:长度2 419 mm、宽度1 340 mm、高度1 487 mm、重量(空气中)1 500 kg、排水量1 328 L和稳心高11 mm。建立的多金属结核概念车浮游体几何模型如图1所示。
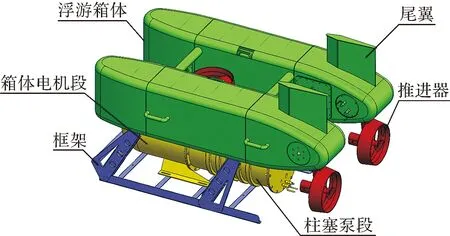
图1 多金属结核概念车浮游体几何模型Fig.1 Geometric model of floating body for polymetallic nodule concept vehicle
2 流体动力学理论分析
浮游体整体外形结构,决定其工作时表面的流场。采用CFD(计算流体动力学仿真分析)软件ANSYS CFX来研究浮游体阻力特性,其数值仿真计算效率和准确度较高,可以满足设计要求。计算流体动力学仿真软件ANSYS CFX是在流动基本方程控制下对流动的数值模拟,其采用有限体积法对控制方程和计算区域进行离散,添加边界条件后求解。本文计算数学模型采用工程湍流数值计算中最为广泛的雷诺时均算法(RANS算法)和两方程的k-ε模型,其中k是湍流动能,ε是湍流耗散率[5]。
雷诺时均RANS方程组为:
(1)

两方程的k-ε湍流模型为:
(2)
上式中湍流动能生成项为:
(3)
(4)
在两方程的k-ε湍流模型中,湍流黏性系数定义为:
(5)
两方程k-ε湍流模型系数为:
Cμ=0.09,Cε1=1.44,Cε2=1.92,σk=1.0,σε=1.3。
3 流体动力学计算分析
首先,在完成多金属结核概念车浮游体整体结构设计的基础上,确定其流域范围,同时利用三维设计软件SolidWorks进一步分析、简化已建立的浮游体几何模型,建立浮游体流体动力学计算模型。然后,将浮游体流体动力学计算模型导入到网格划分软件ANSYS ICEM CFD中生成网格,利用计算流体动力学软件ANSYS CFX分析得到浮游体流体动力学模型。最后,进一步计算得到浮游体阻力等数据,并采用Matlab曲线拟合功能,得到浮游体相应的阻力系数Cd曲线,并研究其阻力特性。
3.1 网格生成
根据浮游体整体外形尺寸,取流域的长、宽、高为浮游体本体长、宽、高的5倍并取整,最终确定计算流域为长12 000 mm、宽7 000 mm、高7 000 mm的长方体域。利用SolidWorks对浮游体整体外形进行适当简化,以浮游体几何模型的重心为原点建立坐标系,建立流体动力学计算模型,如图2所示。根据浮游体已有的各个局部尺寸,同时考虑后续网格划分计算时间和精度等,将流体动力学模型分为IN、OUT、WALL、BIGBODY、MIDBODY、SMALLBODY和RING七个Part,各个Part的意义如表1所示。

图2 流体动力学计算模型Fig.2 Computational model of fluid dynamics

表1 各个Part的意义Tab.1 Meaning of parts
采用ANSYS ICEM CFD软件的非结构自动体网格生成技术,定义全局网格参数,即设置全局网格比例尺(Scale factor)为1.0,最大网格尺寸(Max element)为400.0。定义全局壳网格参数,即网格类型和网格生成方法分别为Quad Dominant和Patch Dependent。定义全局体网格参数,即网格类型和网格生成方法分别为Tetra/Mixed和Robust(Octree)。定义全局棱柱网格参数,即设置生长方式(Growth law )为exponential,初始高度(Initial height)为0.1,高度比(Height ratio)为1.2,边界层数(Number of layers)为3层。为了保证计算精度,同时又减少网格规模,提高数值计算效率,不同Part上定义了不同的最大网格尺寸,如表2所示。

表2 各个Part的网格尺寸Tab.2 Mesh size for parts
在定义网格参数基础上,生成网格,如图3所示。网格质量如图4所示,网格质量都大于0.2,满足后续计算要求。

图3 生成网格Fig.3 Generated mesh
图4 网格质量Fig.4 Mesh quality
3.2 流体动力学计算分析
流体动力学数值计算及后处理采用仿真软件ANSYS CFX,在前处理中定义边界条件时,保持浮游体本体在流域中的位置不变,而改变流域的朝向[6],如图5所示。

图5 计算流域示意图Fig.5 Sketch map of computational basin
流域入口按照速度边界条件[7-8],即按照攻角及漂角进行取值:
(6)
其中,Vin是入口处来流速度,α是攻角,β是漂角。
流域出口按照压力边界条件,即取相对静压值为零。流域侧壁按照自由滑移壁面边界条件,而浮游体本体表面按照无滑移壁面边界条件。
设定各个参数的收敛残差值Residual Target为1.0E-4。设置最大迭代次数Max. Iterations为80,迭代将近60步后计算结果开始收敛,图6所示为浮游体流体动力学计算残差变化情况,可以判断计算结果已经收敛。最终计算得到了浮游体在每个攻角(分别为0°、±2°、±4°、±6°、±8°和±10°)下不同速度(1~6 kn)时的阻力及阻力矩数据,共66组数据。

图6 计算残差变化情况Fig.6 Variation of residual
3.3 阻力特性分析
在研究浮游体阻力时,分为主体部分和附属体部分。浮游体主体部分阻力包括摩擦阻力、形状阻力和兴波阻力。通常把附属体部分阻力的摩擦阻力计入到主体的摩擦阻力中,剩余的阻力作为一项,为附体阻力[9-10]。浮游体水下航行的总阻力为:
R=RF+RX+RW+RAP
(7)
其中:RF是摩擦阻力,RX是形状阻力,RW是兴波阻力,RAP是附体阻力。
本文所设计的浮游体在水下航行时,其工作深度超过三分之一总长,浮游体的兴波阻力几乎为零,故不考虑其兴波阻力,则浮游体水下航行时的阻力主要由摩擦阻力、形状阻力和附体阻力三部分组成。即:
R=RF+RX+RAP
(8)
上式中摩擦阻力和形状阻力分别为:
(9)
(10)
其中:ρ是海水密度;V是浮游体速度;S是浮游体浸湿表面积;(CF+ΔCF)是摩擦阻力系数,CF是光滑平板的摩擦阻力系数,ΔCF是粗糙度附加增量;CE是形状阻力系数。
将附属体部分的阻力并入到形状阻力中去,主要从摩擦阻力和形状阻力计算分析浮游体阻力特性。此时浮游体水下航行的总阻力R为:
(11)
其中:Cd为阻力系数。
可得到阻力系数Cd定义如下:
(12)
利用通过仿真分析软件ANSYS CFX得到的阻力数据,采用Matlab最小二乘法拟合,并结合上述阻力系数Cd的定义,得到了不同攻角工况下阻力系数Cd计算结果,并拟合出阻力系数曲线,如图7所示。

图7 阻力系数曲线Fig.7 Drag coefficient curve
通过不同攻角工况下阻力系数曲线图可以看出,在正攻角工况下,阻力系数Cd随攻角的增加而减少。而在负攻角工况下,阻力系数Cd随攻角绝对值的增加而增加。尽管阻力系数Cd随攻角的变化而增加或减少,但阻力系数变化幅度都很小,这一点从图8和图9的两种攻角工况下浮游体表面压力云图得到了验证。浮游体表面压力分布对其攻角的改变不敏感,说明本文设计的浮游体整体外形满足设计需求,验证了外形设计方案的可行性。

图8 0°攻角工况下浮游体表面压力云图Fig.8 Pressure contour of the surface of floating body at the angle of attack 0°

图9 -6°攻角工况下浮游体表面压力云图Fig.9 Pressure contour of the surface of floating body at the angle of attack -6°
4 小结
本文针对深海采矿实际需求,提出了一种新的设计思路,将液压站分离出来设计成独立的浮游体,浮游体与集矿车协同工作,使深海集矿车获得了更好的稳定性及操纵性,提高采集率。运用SolidWorks完成了多金属结核概念车浮游体外形设计,建立了其流体动力学计算模型。借助ANSYS CFX软件,对浮游体进行了流体动力学仿真分析,模拟了其在攻角为0°、±2°、±4°、±6°、±8°、±10°和速度为1~6 kn工况下的水动力性能,并进一步研究了浮游体的阻力特性,得知本文设计的浮游体表面压力分布对其攻角的改变不敏感。验证了外形设计方案的可行性,为浮游体下一步控制策略研究提供了重要依据,并为未来深海集矿工程实际应用打下了基础。
致谢 感谢中国科学院沈阳自动化研究所及长沙矿治研究院责任公司给予项目经费资助,并在整个研究过程中提供实验室及实验设备等;感谢陈质二博士及王亚兴博士在整个仿真实验过程中给予指导及建议;感谢张洪彬硕士在论文选题、构思及撰写过程中给予指导及建议。
[1] DAI Yu, LIU Shao-jun. Researches on deep ocean mining robots: status and development[J]. Robot,2013,35(3):363-375.
戴瑜,刘少军.深海采矿机器人研究:现状与发展[J].机器人,2013,35(3):363-375.
[2] LIU Shao-jun, LIU Chang, DAI Yu. Status and progress on researches and developments of deep ocean mining equipments[J]. Journal of Mechanical Engineering,2014,50(2):8-18.
刘少军,刘畅,戴瑜.深海采矿装备研发的现状与进展[J].机械工程学报,2014,50(2):8-18.
[3] DAI Yu, LIU Shao-jun. Establishment of the dynamic model of the total deep ocean mining system and fast simulation of its integrated operation process[J]. Journal of Mechanical Engineering,2012,48(9):79-88.
戴瑜,刘少军.深海采矿整体系统动力学建模及联动开采作业过程仿真分析[J].机械工程学报,2012,48(9):79-88.
[4] MENG Ling-shuai, LIN Yang, ZHENG Rong, et al. Mechanical design and implementation of a modular autonomous underwater vehicle[J]. Robot,2016,38(4):395-401.
孟令帅,林扬,郑荣,等.模块化自主水下机器人的机械设计与实现[J].机器人,2016,38(4):395-401.
[5] ZHANG De-liang. A course in computational fluid dynamics[M]. Beijing: Higher Education Press,2010:19-36.
张德良.计算流体力学教程[M].北京:高等教育出版社,2010:19-36.
[6] HU Zhi-qiang, YI Rui-wen, LIN Yang, et al. Numerical calculation methods for hydrodynamics of unmanned underwater vehicles based on body-fixed coordinate frames[J]. Chinese Science Bulletin,2013,58(Suppl.Ⅱ):55-66.
胡志强,衣瑞文,林扬,等.基于随体坐标系的水下机器人水动力数值计算方法[J].科学通报,2013,58(增刊Ⅱ):55-66.
[7] SOHANKAR A, NORBERG C, DAVIDSON L. Low-reynolds-number flow around a square cylinder at incidence: study of blockage, onset of vortex shedding and outlet boundary condition[J]. International Journal for Number Methods in Fluids,1998,26(1):39-56.
[8] WANG Mei-ting, QI Yong-feng, DAI Zhi-guang, et al. Research on shape and linear sailing resistance character of mini underwater robot[J]. Machinery Design & Manufacture,2013,12(1):35-38.
王妹婷,齐永锋,戴志光,等.小型水下机器人外形及其直航阻力特性研究[J].机械设计与制造,2013,12(1):35-38.
[9] HAO Ying-ze,LIN Fan-cai,LIU Bai-shun. Sailed resistance analysis and drag reduction measures of submarine[C]//Proceedings of oversize ship maneuvering and ship security and management,2003:141-144.
郝英泽,林凡彩,刘百顺.浅析潜艇水下航行阻力及减阻措施[C]//特大型船舶操纵和船舶安全与管理论文集,2003:141-144.
[10] NGUYEN B,HOPKIN D. Modeling autonomous underwater vehicle(AUV)operations in mine hunting[C]//Oceans Europe #Brest France,2005:533-538.
The contour design and analysis for drag characteristic of floating body for polymetallic nodule concept vehicle
FENG Guan-hua1, LI Zhi-gang*2, FENG Ying-bin2, LIANG Hong-guang2, CHENG Yang-rui3, WU Dong-hua3
(1.SchoolofMechanicalEngineering,ShenyangLigongUniversity,Shenyang110159,China; 2.StateKeyLaboratoryofRobotics,ShenyangInstituteofAutomation,ChineseAcademyofSciences,Shenyang110016,China; 3.StateKeyLaboratoryofExploitationandUtilizationofDeep-SeaMineralResource,ChangshaResearchInstituteofMiningandMetallurgyCo.Ltd.,Changsha410012,China)
Aiming at the practical demand of deep ocean mining, the hydraulic station on the nodule collector was proposed to separate from the nodule collector and hydraulic station was designed as a floating body, relatively independent and suspended above the front of the nodule collector. Contour of floating body for polymetallic nodule concept vehicle (referred to as floating body) was designed, and its 3D model was established adopting SolidWorks. The hydrodynamic and computational model of the floating body was established, after simplifying the 3D model. Reynolds average navier-stokes algorithm (RANS algorithm) and turbulence model were applied, and drag data under the condition of different working conditions was obtained adopting fluid dynamics simulation and analysis software ANSYS CFX. Drag characteristic of floating body was studied adopting curve fitting function of Matlab, and the feasibility of contour design was verified.
deep ocean mining; contour of floating body; fluid dynamics simulation and analysis; drag characteristic
10.3969/j.issn.1001-909X.2017.01.010.
2015-12-03
2017-01-09
国家高技术研究发展计划(“863”计划)项目资助(2012AA091201)
冯冠华(1991-),男,河南淇县人,主要从事水下机器人水动力分析以及载体技术研究。E-mail:fengguahua@sia.cn
*通讯作者:李智刚(1970-),男,研究员,主要从事水下机器人控制系统研究、动力传输及保护技术研究、产品开发及工程化。E-mail:lzg@sia.cn
TP242.3
A
1001-909X(2017)01-0080-06
10.3969/j.issn.1001-909X.2017.01.010
冯冠华,李智刚,冯迎宾,等.多金属结核概念车浮游体的外形设计及阻力特性分析[J].海洋学研究,2017,35(1):80-85,
FENG Guan-hua, LI Zhi-gang, FENG Ying-bin, et al. The contour design and analysis for drag characteristic of floating body for polymetallic nodule concept vehicle[J].Journal of Marine Sciences,2017,35(1):80-85, doi:10.3969/j.issn.1001-909X.2017.01.010.
猜你喜欢
潍坊学院学报(2020年2期)2021-01-18 07:02:00
作文大王·低年级(2020年2期)2020-03-13 08:10:04
机械管理开发(2020年1期)2020-02-17 04:44:28
流行色(2019年10期)2019-12-06 08:13:26
宇航总体技术(2019年5期)2019-10-11 07:32:56
幽默大师(2019年5期)2019-05-14 05:39:44
北京航空航天大学学报(2017年7期)2017-11-24 05:27:22
环境科技(2016年2期)2016-11-08 12:18:22
江西煤炭科技(2015年1期)2015-11-07 03:06:32
振动与冲击(2015年2期)2015-05-16 05:37:34