
车道偏离预警算法的研究
2017-04-20 10:24杨萍杨磊
绿色科技 2017年6期
杨萍+杨磊

摘要:从车道偏离预警方面着手为了协助司机使车辆行驶在正确的车道线内,并且能够及时的发现和提醒司机车道已经偏离,以保证不会因为司机的疏忽、疲劳等原因引起的车道偏离,降低由于车道偏离所引发的交通事故,从而提高车辆的主动性安全,建立了车道偏离预警模型和预警决策的算法,并通过实验验证了该算法具有一定的可靠性和实际应用性。
关键词:偏离预警;车道识别;预警模型
中图分类号:U491
文献标识码:A 文章编号:1674-9944(2017)6-0173-04
1 引言
随着我国经济的快速发展,人均汽车拥有量和机动车产量不断上升,人们在享受车辆带来的巨大便利时,也苦吞其带来的恶果[1]。当汽车处于长途驾驶或在高速路上行驶时,司机通常会因为过度的劳累或者因单调驾驶而出现注意力不集中和打磕睡的一些现象,以致于驾驶者在驾驶过程中遇到危险行驶情况时未能及时准确的做出反应,导致汽车偏离路线,甚至发生交通事故[2]。所以,本文研究的车道偏离预警系统,主要是协助司机在单调的行驶环境中保持在相应车道内驾驶,这已经成为国内外的研究重点。
2 常用车道偏离预警模型的分类
在现有的车道偏离预警模型当中可粗略划分为4类:FOD(基于汽车未来偏离的量的不同[3])、CCP(基于汽车在车道中的目前位置)[4]、KBIRS(基于知识下的道路场景感知)以及TLC(基于汽车即将横越车道边界的时间)这4种类型[5~8]。
2.1 FOD车道偏离预警模型
FOD车道偏离预警模型考虑了驾驶员自己的驾车习惯,在虚拟边界状态时增加了其在驾驶时的自然转向时习惯的一些偏离量。若驾驶员在驾驶时没有这种偏离习惯,那么真实的车道标志线和虚拟的车道线重合一致。使用FOD预警模型方法引起的警告触发其准则是:L′P>V;L′P则表示为预计车辆的侧向位置,它的计算公式是:L′P=LP+TLV。当前车辆与车道边界线之间的距离表示为LP,侧向速度表示为LV;T是预计的时间,其计算公式为:V-xLV=T,公式里的x含义是期望警告发生的点;V则表示为虚拟的车道边界 。
2.2 CCP车道偏离预警模型
CCP车道偏离预警模型最主要的原理就是利用汽车在车道当中的位置信息。根据车道检测算法可以获得汽车在车道中的当前位置。使y0为车道中心和车辆中心之间的距离,假设汽车几乎平行于车道,b车辆宽度给定一个值时,当前汽车的俩前轮与左右车道边界线的相对位置利用以下公式计算得出:
(1)式中,上式表示左边车轮相对左边车道边界的位置,下式表示右边车轮相对右边车道边界的位置;bc表示车道宽度。当Δy>0时,则汽车在车道线里面,无须发出警告。若汽车前轮中其中的一个轮胎跨越车道边界的时候,则汽车已经偏离了车道,也就是说只要有一边Δy<0,那么就认为汽车已经偏离了车道。
2.3 KBIRS车道偏离预警模型
KBIRS车道偏离预警模型现在还没能在车道偏离预警的系统中做出实际应用,这种模型目前还只是被当成一种理论上的观点所提出来的,最主要的都是感知自然场景。通过物体的几何轮廓来大概的估测物体是否存在,然后经过分析后所得到的车道信息,称为KBIRS模型的原理。KBIRS模型的方法是以当汽车如果产生了很大幅度的偏移时,那么就会剧烈的改变场景感知,利用这种方法来决定有无需要发出相关的警告信息为基本思想的。
2.4 TLC车道偏离预警模型
TLC车道偏离预警模型主要是用于尽早地检测出车辆可能的偏离信息。这种方法是以几秒钟内汽车的假设运动模型为主要依据的,并且能夠将汽车即将离开车道边界的时间估计出来。需要考虑以下两种运动模型来计算,即:
①设定汽车保持目前的方向不变,则可以用下式来描述得到的运动模型为:
y(l)=y0+θl(2)
(2)式中,汽车相对车道的方向的夹角表示为θ,也可以称之为航偏角;汽车所行驶出的直线的距离表示为l;y0用来表示当前这一时间的汽车相对车道的中心的横向偏移的量;在驶出距离为l时的汽车横向偏移量表示为y(l)。
②设定驾驶者一定的方向盘的转角不变,则这种情况下汽车的运动轨迹与车道的边界回归曲线的模型就会很相似,那么描述公式可表示为:
y(l)=y0+θl+12C0l2(3)
(3)式中,汽车的运动曲线的曲率表示为C0,通过计算当前方向盘的转角来获得。前面所说的这两种模型全部都是基于汽车中心的运动所估计出来的,分别用以下公式来描述左右轮的运动:
yl(l)=y(l)+12bc,yr(l)=y(l)-12bc(4)
(4)式中的下标和分别代表的是左右车轮,汽车即将横越过车道的边界的假设距离是由汽车运动的曲线和相对应的车道的边界曲线它们之间的相交点来决定的,TLC 值就是利用此距离比现有汽车的速度来计算得到的 。
3 建立车道偏离预警的模型
在现有的一些车道偏离预警系统的模型基础上,经过分析和对比,根据实际应用的需求,这里主要利用的是基于汽车在当前车道中方向参数和横向的位置来确立偏离预警的规则的。
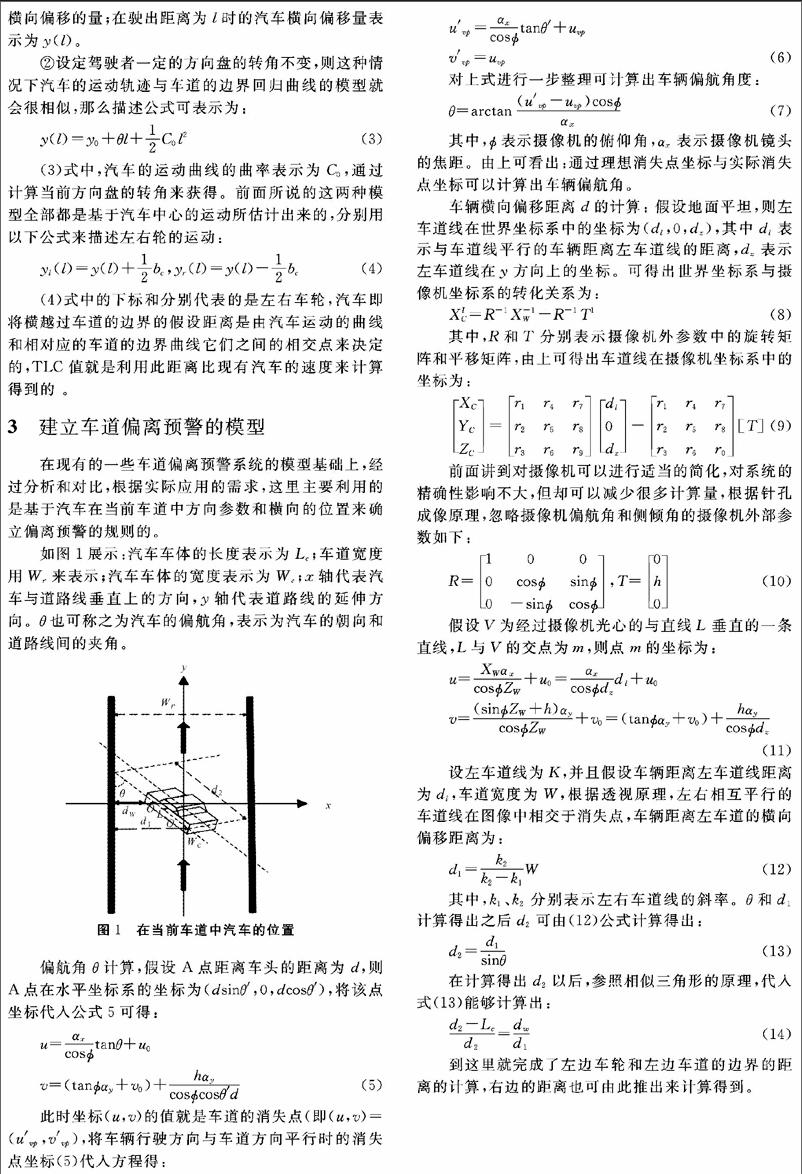
如图1展示:汽车车体的长度表示为Lc;车道宽度用Wr来表示;汽车车体的宽度表示为Wc;x轴代表汽车与道路线垂直上的方向,y轴代表道路线的延伸方向。θ也可称之为汽车的偏航角,表示为汽车的朝向和道路线间的夹角。
其中,表示摄像机的俯仰角,αx表示摄像机镜头的焦距。由上可看出:通过理想消失点坐标与实际消失点坐标可以计算出车辆偏航角。
车辆横向偏移距离d的计算:
假设地面平坦,则左车道线在世界坐标系中的坐标为(dl,0,dz),其中dl表示与车道线平行的车辆距离左车道线的距离,dz表示左车道线在y方向上的坐标。可得出世界坐标系与摄像机坐标系的转化关系为:
其中,R和T分别表示摄像机外参数中的旋转矩阵和平移矩阵,由上可得出车道线在摄像机坐标系中的坐标为:
前面讲到对摄像机可以进行适当的简化,对系统的精确性影响不大,但却可以减少很多计算量,根据针孔成像原理,忽略摄像机偏航角和侧倾角的摄像机外部参数如下:
假设V为经过摄像机光心的与直线L垂直的一条直线,L与V的交点为m,则点m的坐标为:
设左车道线为K,并且假设车辆距离左车道线距离为dl,车道宽度为W,根据透视原理,左右相互平行的车道线在图像中相交于消失点,车辆距离左车道的横向偏移距离为:
其中,k1、k2分别表示左右车道线的斜率。θ和d1计算得出之后d2可由(12)公式计算得出:
在计算得出d2以后,参照相似三角形的原理,代入式(13)能够计算出:
到这里就完成了左边车轮和左边车道的边界的距离的计算,右边的距离也可由此推出来计算得到。
4 车道偏离预警决策算法
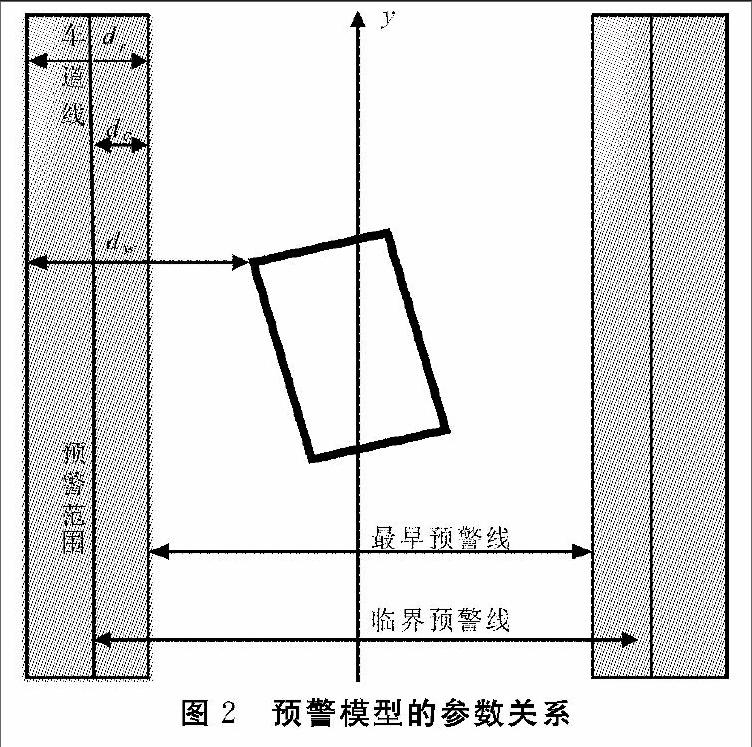
在计算出来的左边和右边两侧的车轮和左右两侧的车道的边界的距离之后,分别来判断这两个距离有无符合触发到车道偏离预警的系统。如图2所展示的预警模型参数关系。
在图2中,汽车的行驶方向和车道方向间的夹角表示为θ,θ<0即表示为当汽车向右侧方向转弯,θ>0即表示为当汽车向左侧方向转弯。在最早的报警线和车道线两者之间设置临界警报线。触发车道偏离预警时有以下情况:
(1)当汽车的前车轮在最早报警线与临界报警线之间时,可以满足下面的公式,同时要在θ>θt(即θt为一个固定的阈值)时才会触发到车道偏离预警的系统。
(2)当汽车的前车轮在临界的报警线之内时,就能满足下面的公式,那么就会直接触发汽车车道偏离预警的系统。
(3)若驾驶者在转向驾驶时启动了转向灯(即进行了下意识的转向行为操作),则汽车就不会触发到车道偏离预警的系统。
5 实验验证
我们把实验所用的CCD摄像机安装固定在车内前视镜上之后,在合芜140 km的高速公路段进行试验。来回进行了两次测试,并对往返两次测试结果进行偏离预警统计,统计结果如表1所示。
在此次试验中主要是统计出了从采集图像及处理的过程到估算出汽车行驶中的参数及再到最后确定系统需不需要发出预警信号等一整个运行计算的过程所需的时间。并且还对改变的车道模型与其关键参数的提取等对它们进行了准确度的统计。经过试验得到的系列数据和图形发现,这里所研究的偏离预警系统多数情况都能发现并发出警告,其误警率也低至3%。实验中的截图如图3所示。
虽然这里研究时考虑了一些算法的实时性以及有效性,但还是因为个人能力和时间上的不足以及实验条件较差等的因素,仅仅满足了一部分的设计要求,对于实际的应用来说还相差甚远。只是例举了部分道路情况,还有很多不同的情况都没一一例举出来了。除此之外,车道的变更等情况也没考虑在内,所以本论文还处于对车道偏离预警系统的设计初级阶段,需要展开和讨论的问题和工作还有很多,这些问题都是未来需要进行解决的系列问题了。
6 结语
分析和介绍了现有的较为常用的一些汽车车道偏离预警的系统的模型分类,然后结合所研究的系统的一些实际的情况而设计出了汽车车道偏离预警的系统决策的模块。在最后,对该预警系统决策的模块的一些决策算法的实现以及决策的原理进行了详细的介绍,最后通过实验验证所得,本课题研究的车道偏离预警的系统的具有一定的可靠性和实际应用性。
参考文献:
[1]王现军,胥爱军,宋豫全,等. 汽车轮胎安全智能检测系统的设计[J]. 仪表技术与传感器, 2004(8).
[2]余天洪. 基于機器视觉的车道偏离预警系统研究[D].长春:吉林大学,2006.
[3]Lee,Sukhan,Ed.A Vision Based Lane Departure Warning System[J].IEEE International Conference on Intelligent Robots and Systems,1999(161).
[4]Madden,Vehicle Crash Prevention at NAVLab[J].September,2003(24).
[5]Parag H.Batavia,Driver-Adaptive Lane Departure Warning Systems[J]. Doctor of Philosophy,Carnegie Mellon University,1999,11(24).
[6]Kunsoo Huh,Jaehak Park,Daegun Hong,Cho,D.,Jahng Hyon Park. “Vision-based lane detection for passenger cars: configuration aspects”[M].American Control Conference,2004. Proceedings of the 2004.
[7]Bing Yu,Weigong Zhang,Yingfeng Cai,A Lane Departure Warning System based on Machine Vision[J] IEEE. Pacific-Asia Workshop on Computational Intelligence and Industrial Application, 2008(72).
[8]Pei-Yung Hsiao, Chun-Wei Yeh, Shih-Shinh Huang, and Li-Chen Fu, A Portable Vision-Based Real-Time Lane Departure Warning System:Day and Night[J]. IEEE Transactions on Vehicular Technology,2009,58(4).
