双轮自平衡小车控制系统设计
2017-04-18 03:38蚌埠学院电子与电气工程系常德军陈章宝
电子世界 2017年1期
蚌埠学院电子与电气工程系 孟 帅 常德军 陈章宝
双轮自平衡小车控制系统设计
蚌埠学院电子与电气工程系 孟 帅 常德军 陈章宝
双轮自平衡小车是双轮机器人研究的基础,具有多变量、非线性、强耦合等特性。本文以STC15W4K32S4为主控芯片,MPU6050采集车身的角度和角速度,通过互补滤波进行数据融合,得到优化的角度值,以TB6612FNG作为电机驱动芯片,霍尔元件进行车速测量,构建双轮小车的姿态平衡控制和运动控制系统。通过姿态解算和PID控制,实现了小车的平稳运行。
双轮自平衡小车;STC15W4K32S4;MPU6050;TB6612FNG;PID
引言
双轮自平衡小车因其结构简单、转向灵活等特点,能在狭窄空间中行驶,以及在特殊环境下执行特殊任务,对变化的地形适应性强,引起新一轮研究热潮和广泛的应用开发。双轮自平衡小车作为控制系统的经典模型,是验证控制理论和力学理论的理想实验平台,为科学理论的实验研究起到了硬件平台的作用,有着巨大的研究价值[1]。
1.小车运动平衡分析
设小车模型车体重心到底盘重心长度为l,质量为m,当车轮产生水平向右的加速度α时,对车模受力分析如下图1所示。

图1 车模受力分析
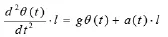
根据小车平衡状态受力和“角加速度与曲率半径的乘积等于切向加速度”可得到车模运动过程中的动态数学模型[2]:

在初始状态时,车轮加速度α为0,并进行工程近似:在θ较小时,,模型可以简化为下式。

对上式微分方程等式两边同时进行拉普拉斯变换,得到静止状态下系统传递函数为:
由式可解系统有一个极点位于复频域实轴的右半部分,所以在静止时车身无法达到平衡,为此需引入比例微分控制,对车模传递函数进行校正,提高系统的稳定性。在增加比例微分负反馈后,相当于增加了系统的开环零点,系统两极点均具有负实部,系统稳定[3]。
2.硬件电路设计
为实现双轮自平衡小车的平衡控制和运动控制,系统硬件设计包括主控模块、姿态检测模块(陀螺仪和加速度计)、测速模块、直流电机驱动模块、电源模块和人机交互模块,控制系统框图如图2所示。电压转换电路采用LM2940-5.0,将电池组的+12V电压转成+5V,用AMS1117-3.3稳压电路将+5V转成+3.3V,人机交互模块使用LCD1602和四个独立按键,实现系统调试时的参数设置和显示。

图2 控制系统方框图
2.1 主控模块设计
系统主控模块采用STC15系列MCU,STC15W4K32S4是宏晶公司生产的增强型8051内核的单片机。工作电压2.5~5.5V,有6路硬件PWM、7个定时器、4组串口、8路高速10位ADC,最大有61k程序Flash和4k字节SRAM,内部集成了时钟和复位电路。通过引脚1、3与MPU6050进行I2C通信,采集姿态数据,引脚30~33、34、35连接电机驱动芯片TB6612,控制电机的转向和转速,通过引脚38、39捕获霍尔传感器输入脉冲;通过引脚21、2、22、4可以对霍尔传感器两相A1(A2)、B1(B2)进行外部中断触发和计数器计数。
2.2 姿态检测电路
姿态传感器使用的是MPU6050,内部集成了三轴加速度计和三轴陀螺仪,所以又称为六轴传感器[4],具有体积小、功耗低、分辨率高等优点。模块内置三个16位模数转换器,加速度计测量范围±2、±4、±8、±16g,陀螺仪测量范围±250、±500、±1000、±2000°/sec,可编程控制姿态传感器的测量范围,来提高读取数据的最小精度,使用引脚23、24与主控间进行I2C通信。姿态检测电路图如图3所示。
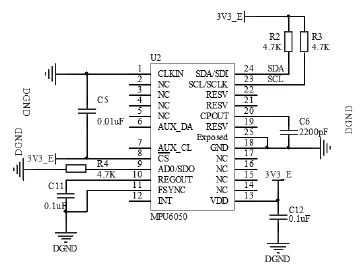
图3 姿态检测电路
2.3 电机驱动电路
电机驱动芯片选用的是东芝生产的TB6612,它的最大工作电压高达15V,平均工作电流可达1.2A,瞬时最大电流可以达到3.2A,而且PWM控制频率可高达100KHz[5]。AIN1、AIN2、BIN1、BIN2脚为输入控制电平,控制电机正、反转,PWM3、PWM4脚与MCU的PWM输出口相连,控制电机加、减速,电机驱动电路如图4所示。TB6612具有大电流H桥结构,双通道电路输出,可同时驱动两个电机,AO1(BO1)、和AO2(BO2)之间可分别接电机。

图4 电机驱动电路
2.4 霍尔测速电路
霍尔传感器是基于霍尔效应的磁场传感器,主要由磁块和磁电检测装置组成[5]。将磁铁粘在非磁性圆盘的边沿,靠近圆盘边沿处放置霍尔传感器,当圆盘转动时,霍尔传感器就输出脉冲,相应的计数变量就加1,在单位时间内测得的脉冲数越多代表速度越快。脉冲采集电路主要由电压比较器LM393、霍尔元件3144和磁感应探头组成,采用非接触检测方式,D6为感应指示灯,当感应到磁场时,输出低电平,信号灯D6亮,3144感应磁场的强度并输出数字信号,再由LM393转化成为脉冲。
3.系统软件设计
采用模块化的设计思想,系统软件设计包括:数据采集与传输,PID控制,PWM驱动及其他模块程序设计。系统上电初始化后,首先检测倾角是否在可控范围内,条件为真时进行数据采集与传输,通过角度PD和速度PI控制PWM输出,调节PWM占空比来调节车速,从而保持车模的动态平衡,通过改变给定的车体倾角θ实现小车的运行。
六轴姿态传感器MPU6050内置了三轴加速度计和三轴陀螺仪,知道六个轴的数据寄存器的地址,就能从数据寄存器中读取数据,MPU6050中自带了I2C程序,利用由数据线SDA和时钟线SCL构成的两线式串行总线,主控单片机就能通过I2C通信读取姿态传感器的未经过滤波的角度,通过互补滤波进行数据融合,得到小车的倾角值。
PID(比例、积分、微分)控制以车身倾角为设定值[6],以偏差e(t)为输入,构建双闭环PID调节控制器,通过第一级角度PD控制计算出小车保持动态平衡需要的车轮速度值,然后以直流电机上霍尔测速装置构成第二级的速度PI控制。第一级角度反馈不断去补偿角度偏差直至最后接近零,第二级速度反馈调节加到电机上保持小车以特定速度运行。
PWM即脉冲宽度调制,它是指将输出信号的最小周期固定,通过调整最小周期内工作周期的大小来控制输出电压的方法。本设计中,通过PWM调宽可以快速地控制输入直流电机的电压大小来达到调速的目的,设最小周期固定时,输出电压最大为,设占空比为,则平均输出电压为,当改变占空比α时,就可以得到不同大小的输出电压,从而达到调速的目的。
4.总结
本次设计以STC15W4K32S4为主控芯片,通过互补滤波和PID控制算法,设计出能够自平衡的两轮直立前进后退、左右转向的控制系统。通过互补滤波算法,滤波后的角度,既能在静态时紧紧趋近于加速度计的角度,也能在动态时随陀螺仪角度的变化而变化,角度PD控制算法通过互补滤波输出优化的角度并乘以比例增益,再相加未经滤波的角速度乘以微分增益的值,两者共同输出角度PD控制下的电机驱动PWM信号;速度PI控制算法将设定与实测速度值的偏差作为输入,先积分后乘以积分增益,再结合输入乘以比例增益得到的值,两者共同输出速度PI作用下的电机驱动PWM信号,角度与速度输出的PWM值相加得到最终电机驱动PWM信号。实际运行结果表明,小车上电后的动态特性良好,能够有效实现对小车整体平稳运行。本设计实现了小车在平整路面上的运动控制,如何实现小车在不平整及障碍路面执行特定的任务,需在以后的实践中进一步进行研究。
[1]徐国保,尹怡欣等.智能移动机器人技术现状及展望[J].机器人技术与应用,2010.3:29-32.
[2]上海交通大学物理教研室.大学物理学(第四版)[M].上海:上海交通大学出版社,2010:115-117.
[3]高金源,夏洁.计算机控制系统[M].北京:清华大学出版社,2010:159-164.
[4]赖义汉,王凯.基于MPU6050的双轮平衡车控制系统设计[J].河南工程学院学报,2014,26(1):53-57.
[5]刘江.两轮自平衡机器人系统设计及控制研究[D].北京:北京工业大学控制科学与工程系,2007.
[6]孟庆明.自动控制原理(非自动化类)(第二版)[M].北京:高等教育出版社,2008:179-183.
孟帅(1995-),男,本科,电子信息工程,研究方向:嵌入式系统开发,机器人运动控制。
大学生创新创业计划项目(AH201411305036),2016蚌埠学院教学研究项目(2016JYXM28)。
猜你喜欢
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
学生天地(2020年3期)2020-08-25
文苑(2018年22期)2018-11-19
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
电子制作(2018年8期)2018-06-26
童话王国·文学大师班(2017年6期)2017-07-10
太空探索(2015年6期)2015-07-12
世界科学(2013年6期)2013-03-11