基于双目横向会聚模式的机器人在智能生产中的应用
2017-04-15 09:18张衡
河南科技 2017年3期
张衡
(广东理工学院信息工程系,广东肇庆 526100)
基于双目横向会聚模式的机器人在智能生产中的应用
张衡
(广东理工学院信息工程系,广东肇庆 526100)
工厂现场使用的产用机器人以医疗、农业、护理、生活辅助和办公室辅助等领域为实现目标。基于双目横向会聚模式的机器人在智能生产中的应用,不仅体现在传统机器人、机器人汽车制造商、电机制造商等领域,而且在机器人的研究、开发等领域也实现了新技术革命。本文在讨论双目横向会聚模式的基础上,以采摘机器人为例具体介绍该算法的实际应用。
机器人;智能生产;双目横向会聚
随着社会的发展,各行各业对机器人各种功能的需求不断扩大,机器人已经渗透到社会生活的各个领域。比如安全方面,SECOM公司最近生产的小型防盗飞行机器人,未经许可的人员、车辆等进入公司或商场的车间、仓库等设施时机器人就会在上空盘旋,对可疑人员进行抓拍形成图片,甚至场所内的死角、无摄像头的地方也能进行拍摄,并且能够做到在可疑的车辆或人员临近时,给出相关的警告[1,2]。可见机器人技术已经发展到了高度智能化阶段。其中,双目横向会聚模式在机器人技术的发展中起到了很重要的作用。
双目成像技术是通过获取不同图像的同一场景不同视点来完成识别工作的[3,4]。智能机器人可以通过该技术截取视差、角度扫描成像及测距离精度[5,6]。三菱电机在福山制造所使用基于该技术的机器人处理自动组装生产线,使机器可以按照固定指向的图像模型采集相关信息[7]。这使得公司更好地解决了自动化问题,特别是组装过程中的难题[8]。同时,也有利于实施与工程相关的设计。
1 双目横向汇聚模式
所谓双目横向汇聚模式,是指2个摄像机的光轴在识别过程中可以会聚的汇聚模式[9]。成像原理如图1所示。图1是2个围绕各自中心旋转的单目系统坐标变换而形成的。图1所给出的是摄像头俯视的平面,B是镜头间的距离,XZ平面的焦点(0,0,Z)是两光轴的交点,显然交角为θ+θ=2θ。
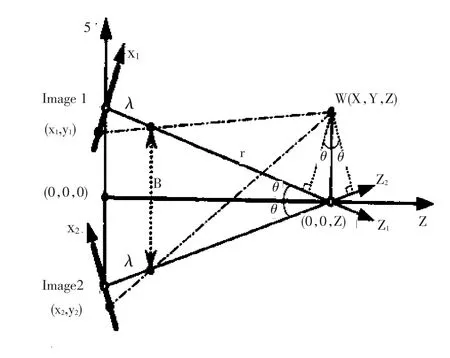
图1 汇聚双目成像中视差
现在来看,在已知坐标(X1,Y1)和(X2,Y2)的情况下如何求点W(X,Y,Z)。
首先,在2个坐标轴、摄像机的会聚点和摄像机(其中一个)中心线所共同围成的三角模型知:

由点W引2条垂线到2摄像机坐标,显然,X轴与这两条直线的夹角都为θ。由三角形相似规律得:

式(2)中,r是从其中一个镜头中心到其他两个系统的会聚点的距离。联立得:

同时,可以解得sinθ、cosθ及Z=Bcosθ/2sinθ+2X1X2sinθ/d。
这样,也把物体与像平面之间的距离Z及d联系在一起。但是,在求解过程当中除了要知道X1、X2的差以外,还要知道X1、X2本身。将r=B/2sinθ代入(2)可得:

综上所述,在使用双目横向会聚模式时,必须根据三角形算法模型进行相应的计算。同时,基线不能极小,以免影响精确度。其次,如果凹陷的表面存在于物体,同样能造成由于遮挡而出现的点,这些点不能同时被拍到。
2 双目横向汇聚系统
以上讨论了双目横向会聚模式,现以栽培系统为例,研究草莓采摘机器人是如何实现该功能的。传统的草莓采摘机器人不但费力,而且效率低。如何使机器人省时、省力是研究的重点。采摘时可使用双目横向汇聚方法进行数据的收集、整理及栽培技巧的积累。图2所示是采摘系统的原理图。
图2给出了图像处理时测定草莓大小且只采摘一定大小的草莓。原理可以这样来描述:首先,通过草莓的成熟度来判断草莓是否适宜采摘;其次,要判断可采摘草莓的位置;最后,切断草莓的果柄。在整个过程中,将采果机器人手向目标位置移动等关键技术是必不可少的。

图2 采摘系统的原理图
基于双目横向汇聚模式的机器人除了在以上草莓采摘过程中得到广泛应用外,还在其他技术领域起到关键作用,比如日本新型机器人“ASIMO”。图3是日本本田开发出的模拟人形机器人“ASIMO”,其身长1 300mm,体质量48kg。与旧型号“ASIMO”相比,轻了6kg。多个该机器人可以进行协同工作。“ASIMO”分工接待不同客人,将客人引导到接待室。本田公司开发出此类机器人可以适应不同的状况。这些机器人利用双目横向会聚模式综合多个传感器可以推断出周围状况和人的动作,然后尽心决策,决定机器人自身的动作行为。这样不但机器人自身的能力得到进化,对事物的决策能力也大大提高。

图3 机器人“ASIMO”
3 双目横向汇聚算法在选择采摘目标过程中的应用
在采摘过程中,适宜的时间以及在不破坏植物的前提下从头到根采摘、收到托盘一整个过程,是机器人目标的确定、辨别采摘的重点内容。首先,确定采摘机器人的装置,如图4所示是机器的中心部分,由5个LED照明灯、3个CCD摄像头、1个机器人手、1个驱动机器控制器组成。比如,在采摘葡萄的过程中,在判断葡萄是否适宜采摘时先使用双目会聚算法判断其是否成熟,然后再判断葡萄的位置,最后执行切断操作,并用机器人手拿住葡萄。其中,将机器人的手臂向目标位置移动是关键技术。
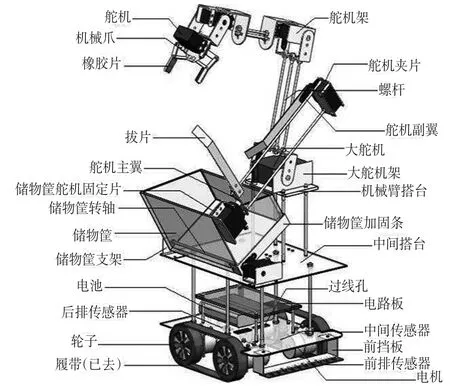
图4 采摘机器人中心装置
机器在工作时还要考虑信息的正向传递问题。
①隐含层中第i个神经元的输出为:

②输出层第k个神经元的输出为:

③定义误差函数为:
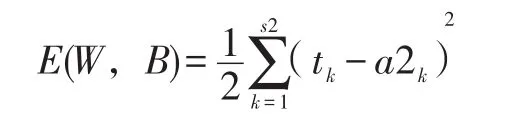
以上算法可以保证权值收敛到一个解,但很可能还有一个局部极小解,并不能保证所求的解就是误差超平面的全局最小解。算法本身采用的是梯度下降法,训练逐渐达到误差的最小值,是从某一起始点沿误差函数的斜面。
4 结论
本文对“双目横向会聚模式”的算法在机器人智能生产中的应用进行了详实的阐述。并以采摘机器人为例,介绍了其如何完成采摘工作。未来的机器人产业将在以下几个方面得到更深入的发展:①提高数倍甚至数十倍的生产效率;②在后期工程中得到推广和扩大使用;③随着图像识别与显示设备技术的进步,访问信息在机器人技术方面的改进。
而且,今后在图片的获取方面,该算法的应用更为广泛。如AR技术就是利用该算法将现场实物及扩张现实感表达出来。比如图像假设不是三维的,就无法表达出完整信息,那么作业人员要花费很多时间学习显示器的使用方法。即使没有图片的信息,双目横向会聚模式也可以被采用,所获取的是声音系统的声音信息,原理基本相同。再比如工厂配管过程中,需要统计出在船上被组装的管材的庞大数量,并在现场进行装配。这一过程也可以用该算法辅助实现。由此可见,双目横向会聚模式算法已经是机器人领域应用极广的技术,并有很广阔的发展前景。
[1]萨师煊,王珊.数据库系统概论[M].北京:高等教育出版社,1991.
[2]王珊.数据库和数据库管理系统[M].北京:电子工业出版社,1995.
[3]邵长勉.动态环境下移动机器人定位及地图创建[D].南京:南京邮电大学,2014.
[4]陈建科.海洋平台钻机自动抓管吊机的动力学分析[D].西安:西安石油大学,2014.
[5]逄淑伟.沈阳机器人产业发展模式研究[D].沈阳:沈阳大学,2015.
[6]王元.数学大辞典[M].北京:科学出版社,2010.
[7]中国大百科全书总编辑委员会《经济学》编辑委员会,中国大百科全书出版社编辑部编.中国大百科全书[M].北京:中国大百科全书出版社,1988.
[8]高阳.微网短期负荷预测“机理+辨识”策略中的白噪声分离[D].天津:天津大学,2009.
[9]张程.5-DOF上肢康复机器人AHP-模糊综合康复评价方法研究[D].沈阳:东北大学,2012.
Application of Robot Based on Binocular Horizontal Convergence Mode in Intelligent Production
Zhang Heng
(Department of Information Engineering,Guangdong Polytechnic College,Zhaoqing Guangdong 526100)
The use of robots in the field of the factory to achieve the goal of medical,agricultural,nursing,life sup⁃port,office assistance and other fields.The application of robot based on binocular lateral convergence mode in intel⁃ligent production,not only reflect in the traditional robot,the robot car manufacturers,motor manufacturers and other fields,but also realize a new technological revolution in the field of robot research and development.In this paper, based on the discussion of binocular convergence pattern,the practical application of the algorithm was introduced.
robot;intelligent production;binocular horizontal convergence
TP242
A
1003-5168(2017)02-0032-03
2017-01-13
张衡(1987-),男,硕士,助教,研究方向:计算机科学与技术方面教学。
猜你喜欢
电子制作(2019年20期)2019-12-04
阅读与作文(小学高年级版)(2017年10期)2017-10-11
西安工程大学学报(2016年6期)2017-01-15
现代计算机(2016年11期)2016-02-28
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
空间控制技术与应用(2010年3期)2010-12-23