
改进灰色预测模糊PID控制策略
2017-04-15 02:08梁秀霞牛菁洋
中南民族大学学报(自然科学版) 2017年1期
梁秀霞,牛菁洋
(河北工业大学 控制科学与工程学院,天津 300130)
改进灰色预测模糊PID控制策略
梁秀霞,牛菁洋*
(河北工业大学 控制科学与工程学院,天津 300130)
针对过程工业对气动调节阀的控制精度与稳定性有较高要求,而常规PID控制策略自适应性与实时性差,难以取得较好的控制效果的问题,根据GM(1,1)模型灰色作用量具有的动态特征来改进灰色预测模型,结合改进灰色预测控制与模糊PID控制的优点,提出了改进灰色预测模糊PID控制策略.仿真结果表明:改进控制策略明显优于常规PID、模糊PID、灰色预测模糊PID控制策略,使系统响应速度加快,超调量减小,且适用于不同的阀门定位系统.
动调节阀;灰色作用量;灰色预测;模糊PID控制;阀门定位系统
气动调节阀由于其结构特性而具备一些非线性特征,如滞后、死区等;由于调节阀工作环境时常发生变化(如:温度、压力、流体特性等),从而对象参数也随之改变,使系统具有不确定性,难以精确地建立阀门定位系统的数学模型;由于气动调节阀自身特性与工作环境的缘故,常规PID控制下系统稳定性较差[1-3],而工业过程中又对调节阀的控制精度与系统稳定性都有较高的要求,因此,必须有效地提高阀门定位系统的自适应性与鲁棒性.
灰色预测能够预测系统的行为规律并制定相应的控制策略,在阀门定位系统中通过超前控制来抑制系统滞后性引起地阀门定位不准以及稳定性较差的问题[4].在灰色预测中,灰色作用量被用来反应数据变化关系,本文根据灰色作用量具有动态特性这一特点,实现对灰色预测模型的改进,从而有效地提高预测精度;模糊控制有较强的容错能力,对于控制过程中数学模型的精确性要求不高,能很好地解决控制过程中的非线性、滞后性等问题[5].
本文在深入研究灰色预测理论和模糊算法控制基础上,把改进灰色预测模型与模糊PID控制相结合,提出了改进灰色预测模糊PID控制策略.
1 优化GM(1,1)模型
灰色作用量能表达数据之间的变化关系,且随着时间的推移不断变化,但常规GM(1,1)模型把外部扰动看作不变的,视灰色作用量为一个常数,这样虽然简化了模型,但与阀门定位系统的特性不相符合.本文将GM(1,l)模型中的灰色作用量改为动态形式[6-8].优化后的GM(1,1)微分方程为:
x(0)(k)+az(1)(k)=b1+b2k,
(1)
式中:a为发展系数;b1+b2k为改进后的灰色作用量.
阀门定位系统阀位输出时间序列:
X(0)=[x(0)(1),x(0)(2),…,x(0)(n)].
(2)
X(0)的AGO(累加生成)序列为X(1),X(1)的紧邻均值生成序列为Z(1):
Z(1)=[z(1)(1),z(1)(2),…,z(1)(n)],
(3)
Z(1)=0.5x(1)(k)+0.5x(1)(k-1),
k=1,2,…,n.
(4)
改进后的参数列:
(5)
Y=[x(0)(2),x(0)(3),…,x(0)(n)]T,
(6)
(7)
对模型参数a,b1,b2进行辨识,由最小二乘法可推出:
(8)
公式(2)的白化方程:
(9)
白化方程的解:
(10)
(10)式离散化:
(11)

(12)
经递推法可得输出数据列h步预测值:
(13)

2 改进灰色预测模糊PID控制策略
2.1 模糊PID控制器设计
模糊PID控制器以阀位误差E及阀位误差变化率EC作为输入量,经模糊化、模糊规则下推理和解模糊后输出PID参数的修正量ΔKP、ΔKI、ΔKD,然后在线修正PID控制器中的PID参数KP、KI、KD,根据不同时刻E、EC对PID参数进行整定,这就是模糊自整定PID控制器[9,10].
2.2 模糊PID控制规则
输入量阀位误差E及阀位误差变化率EC的模糊论域为[-6,6],输出量ΔKP、ΔKI、ΔKD的模糊论域为[-3,3].把上述输入变量和输出变量分为7个档次,分别为负大NB、负中NM、负小NS、零Z、正小PS、正中PM、正大PB;模糊控制器输入量和输出量均为三角型隶属度函数.
模糊控制选取控制量的基本原则为:误差小时以稳定系统、减小超调为主;误差较大时以减小误差为主.据此,参数KP、KI、KD的整定遵循以下原则.
(1) 当误差较大时,为使系统的跟踪性能较好,应适当选取较大的值KP,同时为了避免微分过饱和,选取较小的KD;为了限制系统有过大超调,则需要减小积分作用,甚至KI可以取零.
(2) 当误差中等大小时,为使系统具有较小的超调并具有一定的响应速度,KP取较小值;KI取值要适中,过高过低都会影响系统稳定性;KD值应适当小一些且保持不变,系统对KD值变化很敏感.
(3) 当误差较小时,将KP、KI值调到较大值来提高控制精度和减小静差;考虑到系统在设定值附近可能出现震荡和系统抗干扰能力,应适当选取KD值,可以在误差变化率较小时取值大一些,误差变化率较大时取值小一些.
根据上述参数对系统的影响,结合阀门定位控制的专家经验,建立ΔKP、ΔKI、ΔKD的模糊规则表,如表1~3.
模糊推理策略采用Mamdani推理方法,解模糊化方法采用重心法,由此取得3个精确量ΔKP,ΔKI,ΔKD,PID控制器的参数KP,KI,KD的计算公式为:
(14)
KP0,KI0,KD0是模糊PID控制器参数的初始设定值,KP、KI、KD的调整因子为η1、η2、η3,通过模糊规则的结果进行查表与运算,完成对PID参数的修正.

表1 ΔKP 模糊规则表Tab.1 ΔKP fuzzy rule table
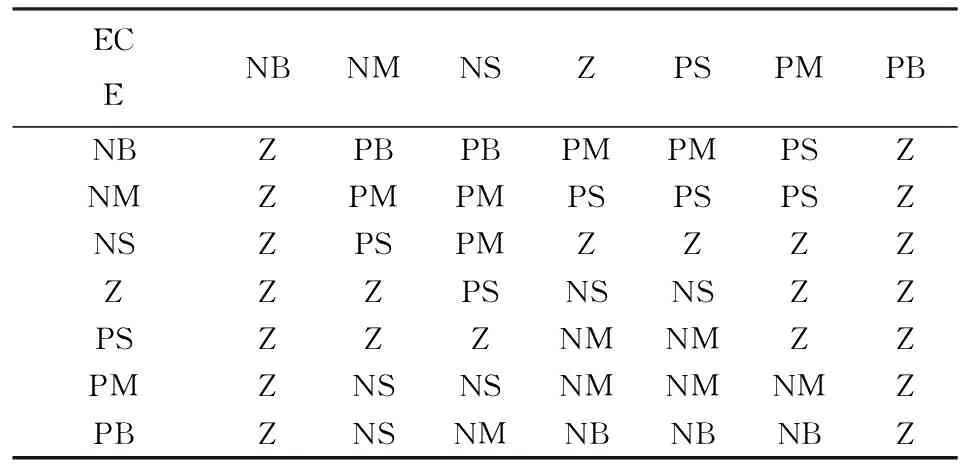
表2 ΔKI 控制规则表Tab.2 ΔKI fuzzy rule table
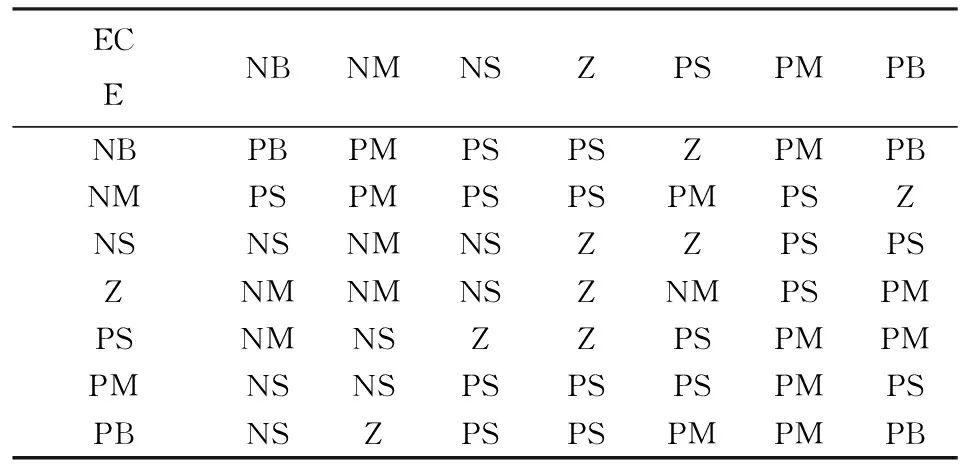
表3 ΔKD 控制规则表Tab.3 ΔKD fuzzy rule table
2.3 改进灰色预测模糊PID控制
改进灰色预测模糊PID控制就是在模糊PID控制器的反馈回路中设置改进灰色预测模型,阀门定位系统的复合控制器结构[11]如图1所示.
改进灰色预测模糊PID控制策略综合了灰色预测理论和模糊控制算法的优点,并根据灰色预测GM(1,1)模型的灰色作用量具有动态特征改进灰色预测模型.改进控制策略的实现步骤如下.
步骤1 按2.2节设定模糊PID自整定控制器.
步骤2 给出设定值r(k),设定值与反馈值之差E(k)及其变化率EC(k)作为模糊PID控制器的输入.
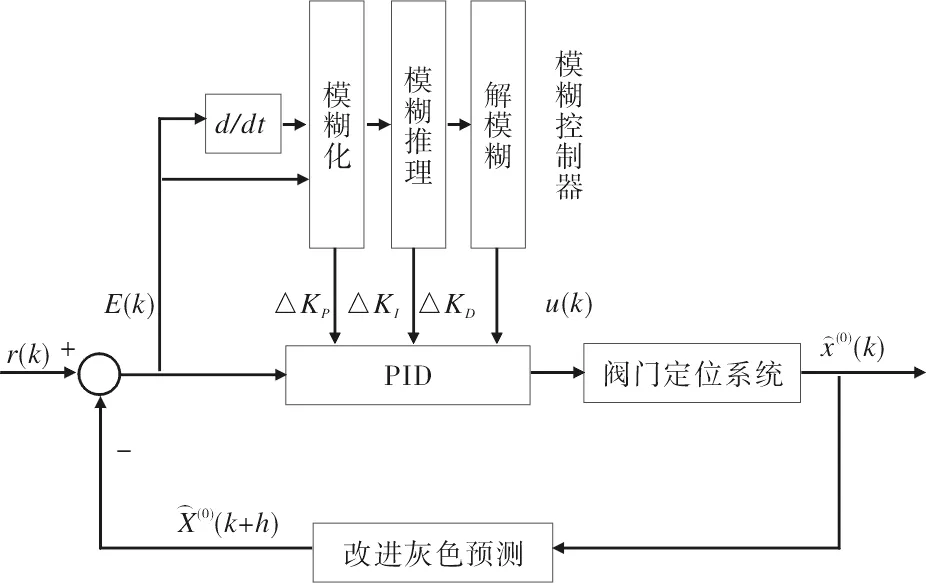
图1 复合控制器结构Fig.1 Structure of composite controller
步骤3 对E(k)和EC(k)模糊化,在模糊规则下整定输出PID参数的修正量ΔKP,ΔKI,ΔKD,最后进行解模糊化运算.
步骤4 计算PID控制器参数KP、KI、KD的值,公式(14).
步骤5 PID控制器输出u(k),对阀门定位系统进行控制,系统输出x(0)(k)即为阀位变化量.
步骤6 由x(0)(k)可得阀门定位系统阀位输出时间序列为X(0),经累加生成为X(1),Z(1)为X(1)的紧邻均值生成序列,公式(2)、(3)、(4).
步骤7 由最小二乘法对模型参数a,b1,b2进行辨识,公式(5)、(6)、(7)、(8).

3 仿真研究
3.1 阀门定位系统原理
阀门定位系统由信号处理部分、中央处理单元(复合算法)、电气转换部分、气动执行器和位置反馈装置构成,如图2.
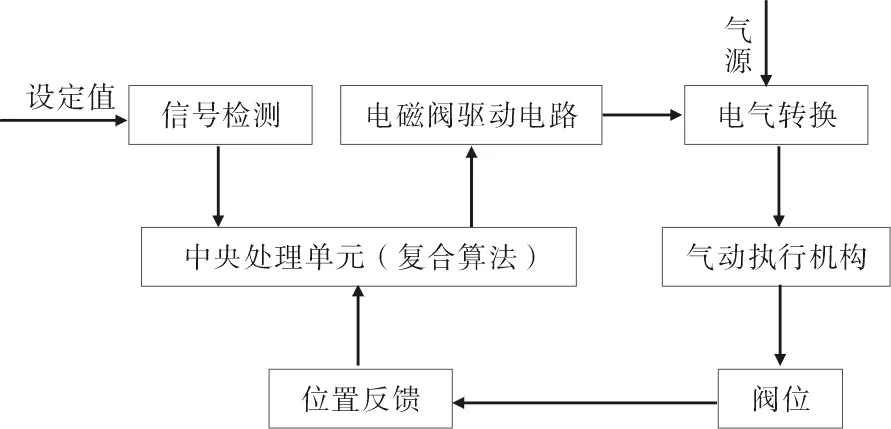
图2 阀门定位系统结构Fig.2 Structure of valve positioning system
阀位设定信号通过信号检测单元转换为中央处理单元能够接收的数字信号,中央处理单元将阀位反馈信号与设定信号进行比较,判断比较结果是否一致,并通过电气转换单元转换为气压信号,调节气动执行机构工作,改变阀位输出.
阀门定位系统的特性通常可以用具有时滞性的一阶或二阶非周期环节来近似描述,为验证改进灰色预测模糊PID控制策略在不同的阀门定位系统中的控制效果,采用实验建模法分别建立一阶和二阶阀门定位系统[12-14].
其中一阶阀门定位系统为:
(15)
二阶阀门定位系统为:
(15)
3.2 仿真结果
将改进灰色预测模糊PID控制策略应用于阀门定位系统中,通过Matlab/Simulink仿真平台验证该控制策略的控制效果,采用s函数编写改进灰色预测模块,灰色预测数列长度n=5,预测步数h=3;模糊PID控制器按照第2小节设置相应的隶属度函数与模糊控制规则,仿真结构如图3、4、5所示.

图3 PID模块Fig.3 PID module

图4 模糊自整定PID模块Fig.4 Fuzzy auto-tuning PID module

图5 改进灰色预测模糊PID控制原理Fig.5 Principle diagram of improved grey prediction fuzzy PID control
(1)常规PID、模糊PID、灰色预测模糊PID和改进灰色预测模糊PID控制下的一阶系统阶跃响应如图6,PID控制器参数设定初值KP0=1.5、KI0=0.25、KD0=0.3.
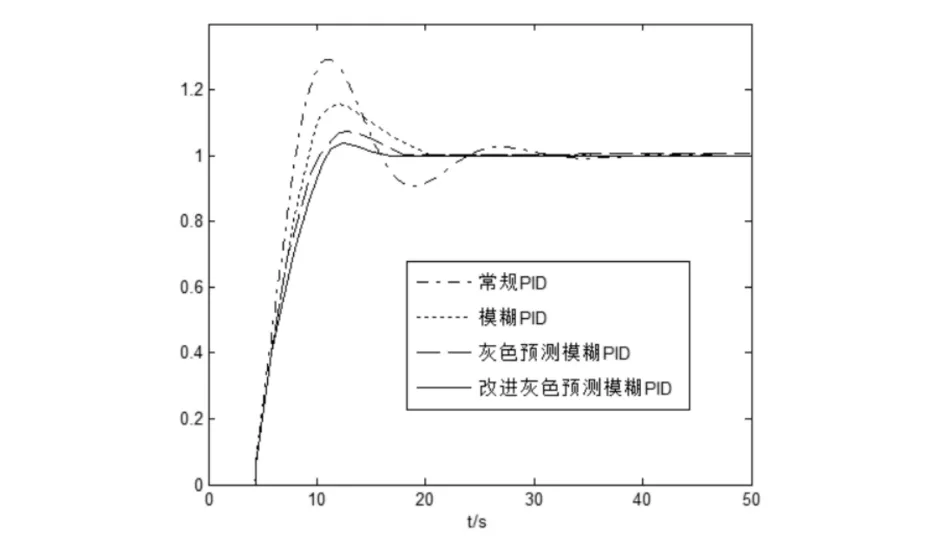
图6 一阶系统阶跃响应Fig.6 Step response of first-order system
由一阶系统阶跃响应曲线图可得出4种控制策略的性能指标,如表4.
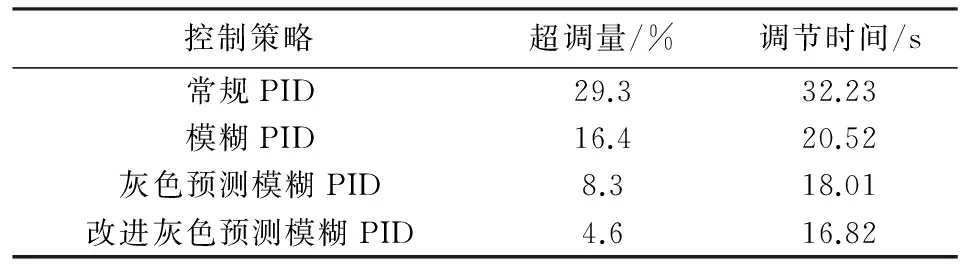
表4 一阶系统性能指标Tab.4 Performance of first order system
(2)常规PID、模糊PID、灰色预测模糊PID和改进灰色预测模糊PID控制下的二阶系统阶跃响应如图7所示,PID控制器参数设定初值KP0=3、KI0=0.4、KD0=0.3.由二阶系统阶跃响应曲线图可得出4种控制策略的性能指标,如表5.
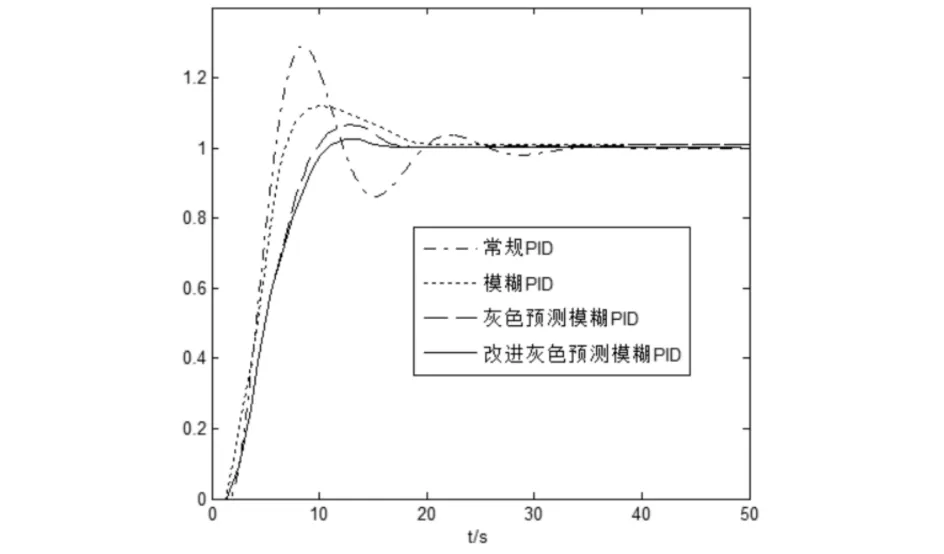
图7 二阶系统阶跃响应Fig.7 Step response of second-order system

表5 二阶系统性能指标Tab.5 Performance of second order system
从仿真结果看出:①常规PID不能因外界环境的变化在线调整参数,故系统具有明显的持续震荡、最大的超调和最长的调节时间;②模糊PID控制器具有在线整定参数能力,对于系统超调与震荡都有一定的改善,控制效果在PID控制基础上有所提高,但该策略具有滞后特性,不能及时消除误差,系统还具有较大超调;③灰色预测模糊PID控制中,灰色预测模型对调节阀系统不确定部分进行粗略估计并进行一定补偿,属于超前控制,能有效改善系统滞后性,系统每采样一次就建立一个新的模型,增强系统自适应能力,故该控制策略下系统稳定性增强,调节时间缩短.④在灰色预测模糊PID控制的基础上,将GM(1,l)模型中的灰色作用量改为动态形式,增强了灰色预测对系统的预测精度,故而在改进灰色预测模糊PID控制下,能进一步减少系统超调量与调节时间.
4 结语
本文提出了改进灰色预测模糊PID控制策略,灰色预测具有”超前控制”特性,能很好改善系统滞后性,优化后的灰色预测模型则进一步提高灰色预测模型精度,与模糊控制结合实现PID参数的在线整定.该策略具有极强的自适应性,且控制精度高,能快速稳定系统.将改进灰色预测模糊PID控制策略应用于一阶和二阶阀门定位系统中均能取得较好的控制效果,证明该策略能适用于不同的阀门定位系统.
[1] 杨伟清,王化祥.智能电气阀门定位器的参数自整定[J].电子测量技术,2008,31(1):39-42.
[2] Li F, Fan Y J,Zhao H T.The research of a piezoelectric valve positioner control algorithm[J].Advanced Materials Research,2014,1030-1032:1565-1569.
[3] 刘金琨.先进PID控制MATLAB仿真[M].北京:北京电子工业出版社,2004:162-170.
[4] 刘思峰,党耀国,方志耕.灰色系统理论及其应用[M].北京:科学出版社,2004:126-163.
[5] 赵彦华.模糊控制及非线性增益改进在中和控制过程中的应用[D].杭州:浙江大学,2004.
[6] Akay D,Atak M.Grey prediction with rolling mechanism for electricity demand forecasting of Turkey[J].Energy,2007,32(9):1670-1675.
[7] 徐华锋,刘思峰,方志耕.GM(1,1)模型灰色作用量的优化[J].数学的实践与认识,2010,02:26-32.
[8] 卢 懿.灰色预测模型的研究及其应用[D].杭州:浙江理工大学,2014.
[9] Chen J, Shu J P, Li M, et al.Research on novel self-spinning high speed on/off valve based on fuzzy-logic parameter self-tuning PID controller[J].Advanced Materials Research, 2012, 468-471:1448-1452.
[10] Zhou E T,Liao S H,Dan M U.Fuzzy-PID control in electro-hydraulic proportional valve system[J].Machine Tool &Hydraulics,2010,2:1454-1457.
[11] 陶永华.新型PID控制及其应用[M].北京:机械工业出版社,1998:147-157.
[12] Ahmed S,Huang B,Shah S L.Identification from step responses with transient initial conditions[J].Journal of Process Control,2008,18(2):121-130.
[13] 邱 亮.基于阶跃辨识的PID自整定策略研究及其应用[D].上海:上海交通大学,2013.
[14] 张二青.气动执行器系统的故障诊断[D].杭州:杭州电子科技大学,2011.
Improved Grey Prediction Fuzzy PID Control Strategy
LiangXiuxia,NiuJingyang
(College of Control Science and Engineering, Hebei University of Technology, Tianjin 300130,China)
For high demand to the control precision and stability of the pneumatic control valve in the process industry, with poor self-adaptability and real-time performance, the traditional PID control strategy is hard to achieve good control effect.The grey action based on the GM(1, 1) have dynamic characteristics.Combining with the advantages of improved grey predictive control and fuzzy PID control, which put forward the improved grey prediction fuzzy PID control strategy.The simulation results show that this strategy possess better control performance compared with the traditional PID, fuzzy PID, grey prediction fuzzy PID control strategy, which response velocity improved and overshoot is decreased for applying to different valve positioning system.
pneumatic control valve;grey action;grey prediction;fuzzy PID control;valve positioning system
2016-08-19 *通讯作者 牛菁洋,研究方向:智能检测和智能系统,E-mail:460977417@qq.com
梁秀霞(1972-),女,教授,博士,研究方向:智能检测与智能控制,E-mail:460977417@qq.com
河北省教育厅研究项目(zd2016071)
TP273+.2
A
1672-4321(2017)01-0087-05
猜你喜欢
流程工业(2022年3期)2022-06-23
能源工程(2022年2期)2022-05-23
现代电力(2022年2期)2022-05-23
煤气与热力(2021年3期)2021-06-09
小学生学习指导(低年级)(2020年3期)2020-06-02
消费导刊(2018年10期)2018-08-20
Coco薇(2017年2期)2017-04-25
Coco薇(2017年2期)2017-04-25
山东工业技术(2016年15期)2016-12-01
为了孩子(3~7岁)(2016年8期)2016-05-14
