
基于高亚像素精度的图像处理测量坦克炮炮口振动位移
2017-04-14 05:43李世立杜文斌李敏生谭天明
测试技术学报 2017年2期
李世立, 郭 旻, 杜文斌, 曹 馨, 李敏生, 谭天明
(1. 西北机电工程研究所, 陕西 咸阳 712099; 2. 内蒙古北方重工业集团有限公司, 内蒙古 包头 014033)
基于高亚像素精度的图像处理测量坦克炮炮口振动位移
李世立1, 郭 旻1, 杜文斌1, 曹 馨1, 李敏生2, 谭天明2
(1. 西北机电工程研究所, 陕西 咸阳 712099; 2. 内蒙古北方重工业集团有限公司, 内蒙古 包头 014033)
本文介绍了某次炮口振动测试与验证, 在测试中以某坦克炮为测试对象, 利用高速摄像对零度角射击姿态下的坦克炮炮口进行拍摄, 对所拍摄图像进行了亚像素级别的图像处理, 最终给出弹丸出炮口时的振动位移. 该测试在靶场射击条件下, 将炮口振动位移的测试精度提高到0.1mm量级. 为了验证高速摄像的亚像素分辨精度, 搭建了一套测试验证系统, 该系统利用微型振动台产生微小振动位移, 由固定在振动台台面上的一只加速度计通过数据积分得到相应的振幅, 以此来实测亚像素分辨精度. 本文在业内首次验证了高量级亚像素分辨率的图像分析在大口径火炮测试中的可行性, 显示出其在大口径火炮炮口振动测试中的优势与潜力.
高速摄像技术; 坦克炮; 位移灵敏度; 炮口振动位移; 亚像素分辨精度
0 引 言
炮口振动包括振动位移、 速度和加速度, 是指在弹丸出炮口时刻, 炮口部位在空间三维上的振动[1-2]. 对于大口径火炮而言, 火炮密集度是靶场火炮验收的主要指标, 关系着火炮研制的成功与否, 而炮口振动是影响火炮射击密集度的主要原因[3-4]. 本文所涉及的炮口振动专指垂直于火炮身管指向并沿俯仰方向的炮口振动位移和振动速度.
大口径火炮炮口振动的准确测量是火炮试验测试工作中长期没有得到解决的难题, 其原因在于炮口周围环境十分严酷, 影响到常规测试传感器的使用. 多年来不断涌现出的一些测试方法与技术在逐步提高着测试精度与稳定性, 这些测试方法主要可分为非接触与接触式测试两大类. 其中, 非接触测试的方法有“光电位移跟随器”和“基于光杠杆原理的激光CCD成像系统”等[5-7], 这些方法逐步把大口径火炮的炮口振动位移的测试精度提高至2mm量级. 接触式测试方法是将加速度计安装在炮口, 采用对炮口振动加速度信号进行积分的方法得到炮口振动速度和位移. 该方法的测试精度约为1~2 mm[7-8], 该方法对传感器安装、 防护、 信号线固定等要求比较高, 可靠性有待提高.
本文所介绍的方法是利用高速摄像机来测量某坦克炮的炮口振动位移和速度, 利用坦克炮零度角射击姿态的便利条件, 在炮口侧面的水平高度上, 直瞄粘贴有专用图像标记的坦克炮炮口. 所得到的炮口运动图像经高精度亚像素图像处理, 测到了0.2 mm量级的炮口振动.
1 高速摄像测量坦克炮炮口振动方法
高速摄像测量坦克炮炮口振动方法, 是在坦克炮的炮口粘贴图像识别专用标记, 采用高速摄像机拍摄弹丸膛内运动期间的坦克炮炮口部位的运动图像, 再由图像处理软件对所拍摄的炮口部位的标记点进行跟踪计算, 以测量炮口部位的振动位移和速度.
高速摄像机的成像原理如同凸透镜成像原理一样, 当高速摄像机与拍摄物体距离确定之后, 即物距一定, 实际上一个整像素代表的位移量就确定了. 当被测物体运动时, 图像处理软件对高速摄像机拍摄的物体运动前后的多幅数字图像进行相关计算, 以测量物体的位移变化等, 如图 1 所示, 在运动前的图像f(x,y)中, 取以标记点(x,y)为中心、 半径为r的圆形计算子区A(又称模板),A在运动着的目标图像g(x,y)中移动, 并按某一相关函数来进行计算, 寻找与模板的相关系数为极值的子区B,B是以(x′,y′)为中心、 半径同为r的圆形区域, 由点(x,y)和(x′,y′)来确定目标的整像素位移. 为了进一步提高目标定位的精度, 可以对以目标整像素位置为中心的一个小区域采用亚像素步长进行相关精确定位. 可通过插值、 拟合、 梯度等方法进行亚像素级重构.

图 1 图像处理示意图Fig.1 Sketch map of image Processing
对于零度角射击的坦克炮, 高速摄像机架设在炮口侧方距离炮口15 m处的地面水平, 选用300 mm定焦镜头, 图像的位移灵敏度约为1 mm/pixel, 帧速为10 000帧/s的高速摄像机. 测试前要考虑火炮振动、 炮口冲击波以及风速是否会引起高速摄像机晃动而产生大幅度位移干扰信号.

图 2 炮口振动位移与低频干扰叠加示意Fig.2 Muzzle vibration and low frequency disturb
通过以下分析可知, 这方面的影响可忽略不计. 原因有两点: ① 弹丸由击发到运动至炮口的时间非常短暂(约6 ms), 这其间不仅高速摄像机, 甚至坦克炮基础架体是不动的. 况且加上地面传播延时以及高速摄像架体的响应延时, 等高速摄像机镜头因遭受冲击而产生明显晃动时, 弹丸已经出膛. ② 无论是火炮身管还是高速摄像机镜头的晃动(风速等外界因素影响), 在较短的膛内运动期间, 其晃动位移的变化量可忽略, 见图 2.
如图 2 所示, 当信号中出现低频干扰时, 由于炮口振动信号的时间历程很短, 致使炮口振动开始和结束时的高速摄像测量值几乎没有变化.
2 某坦克炮炮口振动测量
在某坦克炮靶场射击试验中, 采用高速摄像靶场测试系统进行了炮口振动测试. 该系统中光电炮口信号传感器用以探测炮口火光并自动触发高速摄像机, 同时向其他电测系统送出同步标识信号, 其触发响应时间小于10 μs. 靶场测试示意图见图 3.
靶场布置如图 3 所示, 高速摄像机镜头正对炮口部位, 约定弹丸弹头运动至炮口制退器中间部位的时刻为弹丸出炮口时刻, 弹丸出炮口时刻的高速摄像图像如图4所示. 在炮口制退器后方贴有高速摄像专用标记, 标记的中心线与身管中心线尽量重合, 以方便图像识别和后期图像处理. 标记之间的距离需准确测量, 作为图像处理的计算标尺.

图 3 靶场测试示意图Fig.3 Sketch map of field test

图 4 炮口与标记点位置Fig.4 Muzzle and Marker loacation
高速摄像机采用美国VRI公司的Phantom V12 黑白像机, 感光CCD面积约30 mm×25 mm, 1 280×800像素, 帧速为10 000帧/s, 曝光时间为98 μs. 其配套的镜头参数为: 焦距300 mm, 最大光圈1/4f.
所采用的图像处理软件为瑞典Image Systems AB公司提供的高速运动分析软件TEMA(TrackEye Motion Analysis 3.5), 该软件在分析高速摄像机所拍摄的图像序列时, 能够对其中的特征点和标记点进行自动跟踪, 计算其位移、 速度、 加速度. 在跟踪算法中, 能够实现高精度亚像素分辨精度. 具体分析过程如图 5 所示, 跟踪算法选用的为“象限算法”, “跟踪容差”设定为30%. 经图像处理得到的典型炮口振动位移和振动速度曲线见图 6.
在图 6 的时间轴上, 其“0 ms”时刻为弹丸出炮口时刻. 从炮口振动位移曲线来看, 弹丸在膛内启动后的0~2 ms期间, 炮口基本不动, 在2~4 ms期间炮口以约0.18 m/s的速度向下运动, 在4~6 ms期间火炮保持在-0.2 mm的幅值上. 从该位移曲线来看, 在弹丸膛内运动期间, 整个身管处于低阶次振型.

图 5 图像分析过程Fig.5 Image analysis process

图 6 炮口振动位移及速度数据曲线Fig.6 Muzzle vibration displacement and velocity
3 高速摄像亚像素图像处理精度的实验室验证
为了验证高速摄像的亚像素分辨精度, 测试人员搭建了一套测试验证系统, 该系统利用小型振动台产生微小振动位移, 由安装在振动台上的一只标准加速度计测量台面振动加速度, 通过数据积分得到相应的振动速度与振动位移, 以此来验证高速摄像机的亚像素分辨精度.
如图 7 所示, 该验证系统由小型振动台、 工作标准加速度计、 信号源及功放、 高速摄像机、 直流光源、 数据采集器和图像处理软件等组成. 首先, 在振动台中心处安装一个工作标准加速度计, 用以测量台面振动; 在高速摄像机顶端面安装一只加速度计, 以监测高速摄像机机身的振动位移. 其次, 为了图像识别和后期图像处理, 需要粘帖3个图像标记, 如图 8 所示. point1标记和point2标记粘帖在振动台的台体上, point3标记粘帖在工作标准加速度计的安装基座上, 3个标记点垂直对齐. 精确测量标记点1和点2之间的距离, 作为图像处理的标尺. 选取200 mm变焦镜头, 垂直等高拍摄振动台面, 视场如图 8 所示. 调节高速摄像机与振动台的距离, 使其图像的位移灵敏度为1.2 pixel/mm, 帧频设定为10 000帧/s. 为了能在高速拍摄中看到图像, 需要架设直流光源为标记点补光.

图 7 微小振动位移发生与测试系统Fig.7 Micro vibration generation system

图 8 标记点位置示意图Fig.8 Marker location
由信号源及功放给出100Hz的正弦驱动信号接入小型振动台, 调节功放增益, 使振动台加速度信号的峰峰值达到0.8g, 根据正弦波的积分换算, 此时振动台的台面位移振幅约为0.01 mm.
在振动台稳定起振后, 同时采集加速计信号和图像信号. 对高速摄像机顶端面的加速度信号积分运算后, 确认高速摄像机本身的振动很小(加速度信号为一根平直线), 可忽略不计. 对振动台加速度信号积分得到速度与位移信号; 图像信号经TEMA分析处理得到位移信号, 再经一次微分得到速度信号. 对两组数据进行对比, 以确定该分辨量级位移量的实验室测试偏差. 测试曲线见图 9, 图 10.
图 9 所示曲线分别为: 加速度a/g, 速度b/mm·s-1, 位移c/mm. 图 10 为高速摄像测到的位移和速度曲线.
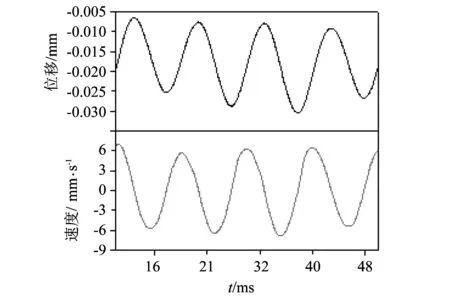
图 10 数据曲线(高速摄像)Fig.10 Data curve (high-speed photography)
振动位移的实验对比结果见表1, 两组曲线的数值相差约20%. 需要指出的是, 表 1 所示的是0.01 mm 振动位移量级的测量精度, 该位移量已接近实验室内亚像素分辨极限, 因而误差较大. 由后续实验可知, 当振动台以50 Hz频率和1 g加速度振动时, 台面振幅约为0.1 mm, 此时高速摄像的测试误差会明显减小, 位移测试对比结果见表 2.

表 1 振动位移对比结果
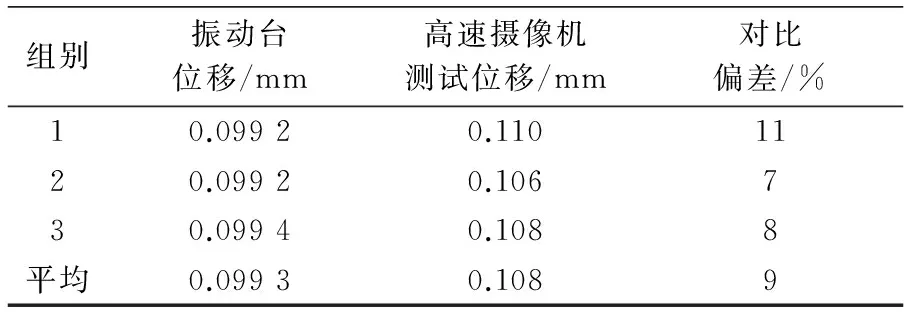
表 2 振动位移对比结果
由表 2 数据可知在0.1 mm振动位移量级上, 高速摄像所测得的位移值较之振动台的约定真值平均偏差为9%, 该系统偏差可在后续测试时予以修正. 而表2所示的高速摄像所测位移值的波动, 可用极差法[9]进行测量结果标准差的估计. 取n=3, 则标准差的估计值为:
(0.11-0.106)/1.693=0.002 4(mm), 即相对标准差为2.2%.
4 结束语
靶场试验的测试结果表明, 某坦克炮的炮口振动仅有0.2 mm量级, 这是目前国内坦克炮炮口测试所测到的最小位移量级. 在实验室进行了相关验证, 证实了所采用的图像处理软件具有0.02 pixel的亚像素分辨能力. 虽然此次初步尝试, 有许多技术细节尚需进一步完善, 但已看到借助于高量级亚像素分辨率的高速摄像技术在大口径火炮炮口振动测试中的优势与潜力.
[1] 王宝元, 钞红晓, 邵小军, 等. 弹丸出炮口时间测试方法研究[J]. 兵工学报, 2012, 33(6): 736-740. Wang Baoyuan, Chao Hongxiao. Shao Xiaojun, et al. Measurement methods for muzzle-leaving time of projectile [J]. Acta Armamentarii, 2012, 33(6): 736-740. (in Chinese)
[2] 王宝元, 邵小军. 炮口振动响应实验测试方法综述[J]. 火炮发射与控制学报, 2010(9): 112-116. Wang Baoyuan, Shao Xiaojun. Summarization of the measurement method for muzzle vibration responses[J]. Journal of Gun Launch & Control, 2010(9): 112-116. (in Chinese)
[3] 徐诚, 王亚平. 火炮与自动武器动力学[M]. 北京: 北京理工大学出版社, 2006.
[4] 王宝元, 陈顺德, 周发明, 等. 火炮振动与射击密集度实验方法研究[J]. 火炮发射与控制学报, 2009(4): 89-93. Wang Baoyuan, Chen Shunde, Zhou Faming, et al. Experiment methods for gun vibration and launch dispersion[J]. Journal of Gun Launch & Control, 2009(4): 89-93. (in Chinese)
[5] 李科杰. 新编传感器技术手册[M]. 北京: 国防工业出版社, 2002.
[6] 张智诠, 朱祺, 丁晟, 等. 基于PSD的炮口扰动测试方法[J]. 装甲兵工程学院学报, 2012, 26(2): 49-53. Zhang Zhiquan, Zhu Qi, Ding Sheng, et al. A measurement method of muzzle disturbance based on PSD[J]. Journal of Academy of Armored Force Engineering, 2012, 26(2): 49-53. (in Chinese)
[7] 陈彦辉, 郭旻, 何宗颖, 等. 炮口振动测试方法及实践[J] . 火炮发射与控制技术学报, 2010(3): 80-83. Chen Yanhui, Guo Min, He Zongying, et al. Muzzle vibration test method and practice [J]. Journal of Gun launch & Control, 2010(3): 80-83. (in Chinese)
[8] 刘继承, 徐庆华. 用加速度传感器测量振动位移的方法[J]. 现代雷达, 2007(5): 69-71. Liu Jicheng, Xu Qinghua. Method of vibration displacement measured with acceleration sensor[J]. Modern Radar, 2007(5): 69-71. (in Chinese)
[9] 李宗扬. 计量技术基础[M]. 北京: 原子能出版社, 2002.
声 明
本刊已许可中国学术期刊(光盘版)电子杂志社在中国知网及其系列数据库产品中,以数字化方式复制、汇编、发行、信息网络传播本刊全文。该社著作权使用费与本刊稿酬一并支付。作者向本刊提交文章发表的行为即视为同意我编辑部上述声明。
Measurement of Tank Gun Muzzle Vibration Based on Image Processing with High Sub-Pixel Precision
LI Shili1, GUO Min1, DU Wenbin1, CAO Xin1, LI Minsheng2, TAN Tianming2
(1.Northwest Insititute of Mechanical and Electrical Engineering, Xianyang 712099, China;2.Inner Mongolia North Heavy Industry Group Co. Ltd., Baotou 014033, China)
This paper introduces a tank gun muzzle vibration measurement and verification. In the test, the muzzle vibration displacement of a tank gununder zero-degree shooting angle was measured by high-speed photography. The recording images were processed based on sub-pixel level, and the vibration displacement at muzzle-leaving time wasacquired from processing. The accuracy of tank gun muzzle vibration displacement was improved to 0.1mm by the measurement. In order to verify the accuracy of sub-pixel precision of high speed camera, a test verification system is set up. In the system, a micro vibrator is used to generate micro displacement vibration. An accelerometer is fixed on the surface of the vibrator, which gives the acceleration of the vibration. The corresponding vibration displacement is obtained through data integration; By data comparison, the accuracy of the sub pixel precision can be verified. For the first time, the feasibility of the application of high sub-pixel precision in large caliber gun test is verifiedin the industryand the advantages and potential of high-speed camera in the large caliber gun muzzle vibration measurement have been revealed.
high-speed photography technology; tank cannon; displacement sensitivity; muzzle displacement; sub pixel resolution
1671-7449(2017)02-0131-06
2016-11-14
李世立(1985-), 男, 工程师, 硕士, 主要从事试验测试与测试技术等研究.
TJ810.6
A
10.3969/j.issn.1671-7449.2017.02.007
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
指挥控制与仿真(2021年6期)2021-12-17
火炮发射与控制学报(2021年1期)2021-05-13
小哥白尼(军事科学)(2020年2期)2020-06-16
兵工学报(2017年5期)2017-06-08
振动工程学报(2015年1期)2015-03-01
噪声与振动控制(2015年4期)2015-01-01
振动工程学报(2014年2期)2014-03-01
火炮发射与控制学报(2010年4期)2010-01-20
军事历史(1988年3期)1988-08-16
