
LIDAR点云建筑物数据提取及三维模型建立*
2017-04-13 02:30张玉娟李秀海
哈尔滨师范大学自然科学学报 2017年6期
张玉娟,李秀海,王 强
(1.黑龙江工程学院;2. 黑龙江省普通高校重点实验室空间地理信息综合实验室)
*黑龙江省青年科学基金(QC2014C040); 黑龙江省普通高校重点实验室空间地理信息综合实验室开放课题(KJKF-14-03)
0 引言
建筑物三维模型对于正射影像生成、地形图修测、变化检测、能源和财产管理,以及许多基于位置的服务都至关重要[1].如何生成可靠和准确的建筑物三维模型一直是建筑物三维重建领域研究的热点和难点.激光雷达测量( Li DAR) 作为一种通过位置、距离、角度等观测数据直接获取对象表面点三维坐标,实现场景信息提取的技术,已广泛应用于建筑物三维重建[2].相比传统的建筑物三维建模方法,基于LiDAR点云数据处理技术的建筑物3D模型精度高、真实性强、自动化程度高,能够大幅度提高作业效率,极大地节约人力、物力[3].
1 数据处理
1.1 谢别德法规则格网化的内插处理生成DSM[4]
Shepard D对反距离加权插值法进行了改进,将最邻近点插值法和多元回归法进行融合,对两种方法进行了深入的研究分析,从中找到值得借鉴的部分综合而来的一种新方法.规定某一局部区域并选择区域内任意一点A,求得所有点到A点的距离加权平均值赋值给点A.这是一种圆滑的差值方法.由于离散点之间的无规则性而对其属性值有着不同的影响,把这种影响用一个函数来进行描述称之为权函数,如公式1:

(1)
式中,zA: 空间待插点A的属性值;di:A点与区域内离散点之间的距离.
权函数除了受距离影响外还受到方向的控制,取决于局部区域的选择.在待插值点A周围平均选择的话就能消除方向对权函数的影响则取距离的二次方.这种差值法在GIS软件中应用的最多.由于点与点之间的远近无法确定,两点距离过远就会形成“鸡蛋”的形状,为了避免这种情况的发生,使用一个参数大于零圆滑参数来消除影响.
1.2 LiDAR数据的最小二乘法内插法滤波处理
该方法最早由Kraus、Pferfer等人[5]研究使用,其原理是根据目标地物的不同高程值来进行高程上的拟合,由于地面点和非地面点的高程差距较大,在进行完最小二乘法线性拟合后导致拟合后的残差无法满足正态分布的要求,通过残差值给区域内的所有点云定义权值,进行迭代计算,从而得到出一个介于实际的地面和测区地物之间的曲面,由于地面点和非地面点的高程差别较大前者残差为负而后者则与之相反,计算所有点的权值.函数式如公式2:
(2)
式中,V:残差值;Q:权值;a、b、g、w均为参数.
当Qn为0时则该点是非地面点,剔除这些点后重复上述过程.
经最小二乘法内插法滤波处理后的点云数据如图1所示.
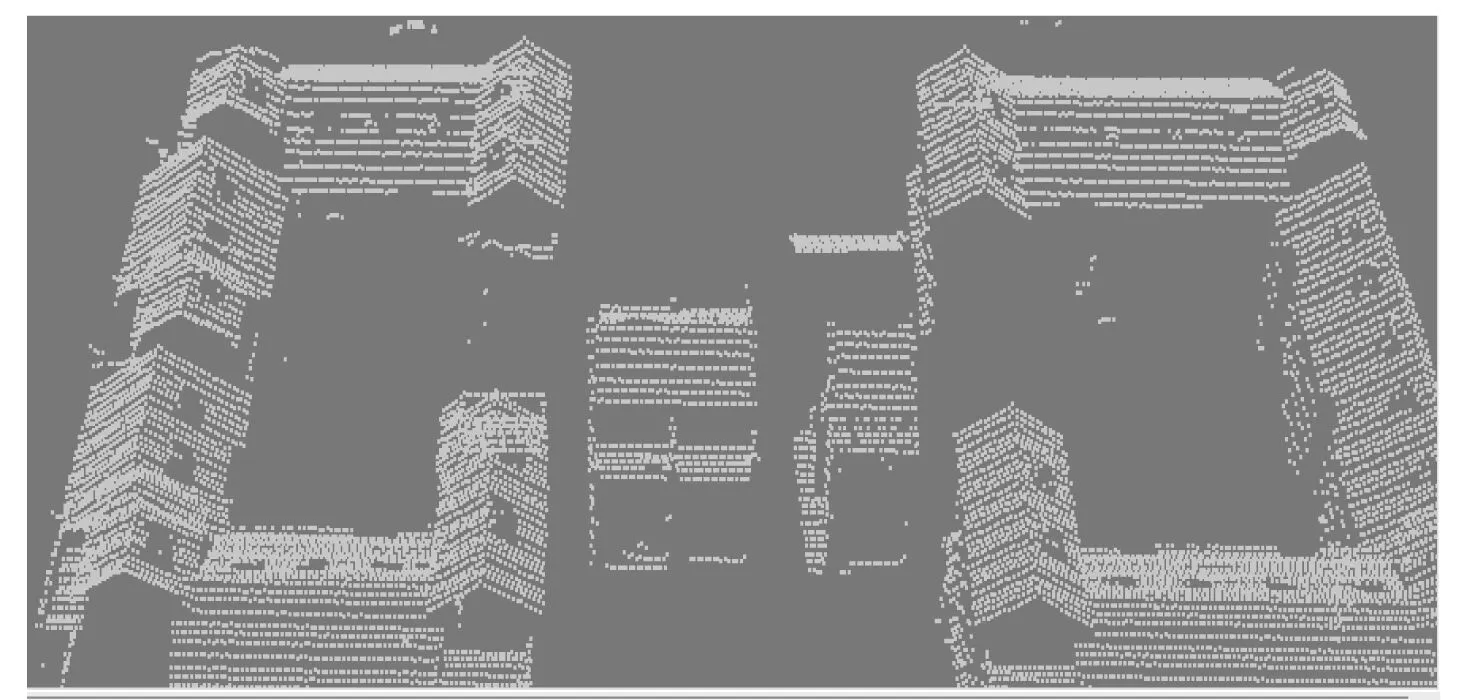
图1 提取建筑物点云数据
1.3 区域扩张法的建筑物影像分割[6]
该文采用简单区域增长法对建筑物影像分割,以像素灰度为特征进行简单区域增长的步骤:
(1)选定某个建筑物像素以其周围8邻域为一个区域,比较该像素和区域内的其他像素进行比较.如果若灰度差值小于所设定的阈值,则符合要求属于同一区域并作出标记;
(2)从新合并的像素开始,反复进行步骤(1)的操作;
(3)反复进行步骤(1)、(2),直至遍历完所有像素;
(4)返回步骤(1),重新寻找新区域起始点的像素.
1.4 确定建筑物外轮廓
(1)Canny 边缘检测算法[7]
Canny最大的贡献在于是推导出了最优边缘算子.最优边缘算子具有低的误判率、边缘定位准确、抑制虚假边缘等诸多的优点.这些都是最优边缘算子应该具备的,也是评定算子效果好坏的标准.由于该算子具有较好的检测效果及稳定性,研究的这种方法在进行建筑物边缘检测时的具体步骤方法.在此基础上来研究建筑物边缘的进一步规则化则选择Hough变换算法实现来说明.具体做法如下:
(1)首先要做的是消除像素噪声对影像的影响,则要对影像进行高斯平滑处理但会造成影像清晰度的下降.
(2)由于边缘方向上的不确定性需要从不同的方向上进行边缘的检测,还要将卷积运算的结果一一记录下来以便于查看亮度梯度和其方向.
(3)由于边缘一般成垂直状态,则在一定区域内找到局部最大值.那么就能确定边缘的位置了,这种处理方法称之为非最大值抑制.
(4)用双阈值算法来完成检测和连接边缘的工作.经Canny 边缘检测算法提取建筑物外轮廓如图2所示.

图2 边缘轮廓线提取结果
2 建筑物三维建模建立
E3De3.0 (The Environment for 3D Exploitation)是Exelis VIS公司(ENVI/IDL原产商)的产品.E3De3.0可进行建筑物三维模型的构建,该文就是依靠它来实现的建筑物的三维重建工作.
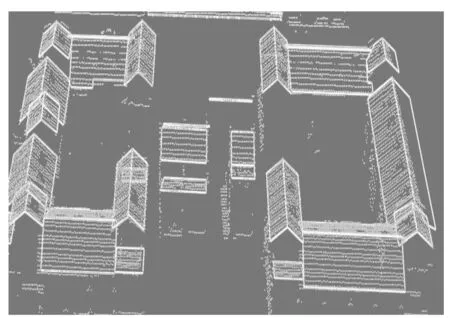
图3 叠加后的建筑物顶部显示

图4 建筑物三维模型显示
从图3和图4中可以看到大部分的房屋都是简单的人字形房屋,这也使得的重建工作变得容易一些.
3 结论
该文仅对人字形房屋进行了三维模型的重建,由于人造房屋的变化复杂还应加强此方面的研究工作.对建好的模型如何评价其建模效果及精度也要重视,建好的模型是否与实际相符是衡量建模好坏的关键.但目前对建筑物的重建精度在国际上还没有权威的评价体系,对建筑物细节的评价也应有相应的准则.
[1]Ran J Y. A Line-Based 3D Roof Model Reconstruction Algorithm: Tin-Merging and Reshaping (tmr) [J]. IS-PRS Annals of Photogrammetry,2012( 1-3) : 287-292.
[2]赵传,张保明,陈小卫,等.一种基于 Li DAR 点云的建筑物提取方法[J].测绘通报,2017( 2) : 35-39.
[3]汪禹芹.机载 Li DAR点云数据的建筑物提取和模型规范化研究[D].南京大学, 2013.
[4]Shepard D. 3D building model reconstruction from point clouds and ground plans[J]. Int arch of Photogrammetry & Remote Sensing.2001:37-43.
[5]Filin S, Pfeifer N. Segmentation of airborne laser scanning data using a slope adaptive neighborhood[J]. Isprs Journal of Photogrammetry & Remote Sensing, 2006, 60(2): 71-80.
[6]张小红.机载激光扫描测高数据滤波及地物提取[D]. 武汉大学, 2002.
[7]赖旭东, 万幼川. 一种针对激光雷达强度图像的滤波算法研究[J]. 武汉大学学报:信息科学版, 2005, 30(2):158-160.
猜你喜欢
数学物理学报(2022年5期)2022-10-09
网络安全与数据管理(2022年3期)2022-05-23
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年1期)2021-03-29
北京航空航天大学学报(2020年10期)2020-11-14
应用数学(2020年2期)2020-06-24
自动化学报(2019年6期)2019-07-23
通信产业报(2016年44期)2017-03-13
中国惯性技术学报(2015年1期)2015-12-19
雕塑(1999年2期)1999-06-28
