
基于扩展卡尔曼滤波器的电流预测控制*
2017-04-12 03:03李玲瑞许鸣珠高旭东
电机与控制应用 2017年3期
李玲瑞, 许鸣珠, 高旭东
(石家庄铁道大学 机械工程学院,河北 石家庄 050043)
基于扩展卡尔曼滤波器的电流预测控制*
李玲瑞, 许鸣珠, 高旭东
(石家庄铁道大学 机械工程学院,河北 石家庄 050043)
高性能的永磁同步电机伺服系统要求快速响应的电流内环来满足系统的高性能要求。经典PID控制容易出现滞后、振荡等问题,而传统预测控制可以实现对指令信号无超调的快速跟踪,但对控制对象的精确数学模型有很强的依赖性。提出的基于扩展卡尔曼滤波的预测控制方法,利用扩展卡尔曼滤波器具有的估计、滤波的优势,降低了预测控制对控制对象数学模型参数的依赖性;同时,相对于PID控制,改进的方法实现了指令信号无超调的快速跟踪,动静态性能得到了提高,电机低速运行噪声大的问题也得到了很好的解决。试验结果验证了该算法的有效性和实用性。
永磁同步电机; 扩展卡尔曼滤波器; 预测控制; PID控制
0 引 言
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因其功率因数大、过载能力强、动静态性能好等特点,被广泛应用于机器人、汽车等高精度控制领域,也吸引了众多学者进行相关研究。PMSM数字控制系统的电流控制策略主要包括经典的静止和旋转轴系的PID控制、滑模变结构控制、预测控制、滞环控制等[1-5]。
静止轴系的PID控制可以限制最高控制频率,但是由于控制器存在的低通滤波器特性,稳态输出在幅值和相位上均存在滞后的问题[6-7]。在旋转坐标系下的PID控制保证了电流控制稳态无静差,但存在交、直轴耦合的问题,从而影响电流的静、动态响应[8]。滑模变结构控制能够改善系统正常运行阶段的动、静态性能,但其在系统原点附近存在高频抖振,增加了控制器的负担[9]。滞环控制响应快速,但是这种bang-bang控制方式存在纹波大、开关频率不固定的缺点,不适用于高性能的控制场合[10]。
预测控制可以实现对指令信号无超调的快速跟踪,但它依赖于被控对象的精确数学模型[11]。扩展卡尔曼滤波器(Extended Kalman Filter,EKF)采用信号与噪声的状态空间模型,利用前一时刻的估计值和现时刻的观测值来更新对状态变量的估计,即以“预测-实测-修正”的顺序递推,根据系统的量测值来消除随机干扰,再现系统的状态。
本文设计了一种基于EKF的预测控制方法,把预测控制成功应用于电流控制系统,建立模型预测的数学模型,并对其离散化处理。为了有效降低预测控制对电机精确数学模型的依赖,把EKF与预测控制相结合应用到电机电流调速系统中,以期提高电机控制的精度、降低运行噪声。试验结果证明,与传统的PID控制相比,本文提出的基于EKF的预测控制方法有效地提高了系统的动静态性能和电机的低速可运行性,同时扩大了电机的有效控速范围,降低了运行噪声。
1 模型预测控制电流控制器
PMSM是一个高阶、非线性、强耦合的多变量系统。为了实现解耦控制将三相交流绕组通过坐标变换等效为旋转的两相直流绕组,变换后系统变量之间得到部分解耦,方便了系统的控制[12]。PMSMdq旋转坐标系下的电压方程为
(1)
式中:ud、uq,id、iq——dq坐标系下的电压、电流;R、ψf——定子电阻、永磁体磁链;Ld、Lq——定子电感;w——转子电角速度。
(2)
即
(3)
模型预测控制由预测模型、滚动优化、反馈校正组成,其控制原理如图1所示。

图1 模型预测控制结构框图
2 EKF的设计
2.1 EKF模型
传统的卡尔曼滤波模型假定控制系统方程和观测方程均为线性的,而PMSM模型系统为非线性多变量系统。本文利用EKF模型实现非线性系统的近似线性化,提高滤波和预测精度[14-15]。
为了降低预测控制对电机精确数学模型的依赖性,采用EKF对电机电流进行估计预测。PMSM的扩展卡尔曼控制方程离散化后可表示为
(4)
式中:f(·)——非线性连续可微分函数;rk——系统噪声;ρk——测量噪声。
在此基础上EKF算法可分为2个阶段:

(5)
(6)
式中:Qd——rk的协方差阵,Qd=diag{q1,q2},q1、q2为常数。
(7)
(8)
(9)
式中:Rd——测量噪声ρ的协方差阵,Rd=diag{r1,r2};
r1、r2——常数。
状态误差协方差阵Pk|k-1初值不取为0[16]。
2.2 静止坐标系电机数学模型的建立
(10)

c=diag{1,1}。
式中:ψr、w——电机转子永磁体磁链和电角速度。

图2 基于EKF的预测电流控制器原理图
3 试验及结果分析

图3、图4分别为PID控制的电机转速图和基于EKF的预测控制电机转速图。电机转速以300 r/min为单位进行变速,调速范围为300~3 000 r/min。对比图3、图4可知,在基于EKF的预测控制算法的控制下,PMSM的转速平稳性得到提高,尤其是电机的低速运行状况得到了很好的改善。从图5、图6电机加速图中可以知道基于EKF的预测控制算法将电机速度平稳性相对PID控制而言提高了一倍左右。除此之外,EKF的加入还很好地降低了电机的运行噪声。
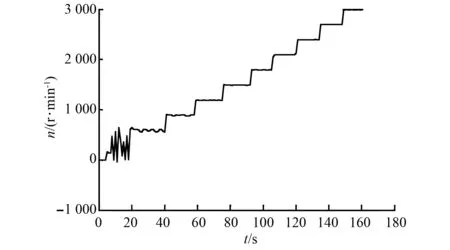
图3 PID控制的永磁同步电机转速图

图4 基于EKF的预测控制电机转速图
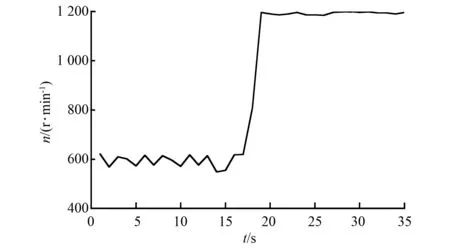
图5 PID控制时电机加速控制图
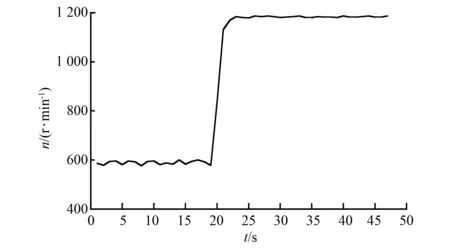
图6 基于EKF的预测控制电机加速图


图7 PID控制电机加减速电流图

图8 基于EKF的预测控制电机加减速电流图
4 结 语
本文提出的基于EKF的预测控制算法,通过EKF具有的估计、滤波两大特点,成功地降低了预测控制对参数的敏感性,并实现了对电机速度环、电流环双闭环的控制。相对PID控制而言,基于EKF的预测控制可以在实现对电流快速跟踪的同时保证电流不出现超调现象,并且稳态运行时电流波动小,电机的速度控制精度得到了提高。相对传统的预测控制而言,基于EKF的预测控制算法对电机模型参数准确性要求低,并且很好地降低了电机的运行噪声。试验结果表明,基于EKF的预测控制算法具有良好的动静态性能,能够较好地提高电机的控制效果,证明了该算法的有效性和实用性。
[1] MOOM H T, KIM H S, YOUN M J.A discrete-time predictive current control for PMSM[J].IEEE Transactions on Power Electronics, 2003,18(1): 464-472.
[2] LIU X X, LI S H.Speed control for PMSM servo system using predictive functional control and extended state observer[J].IEEE Transactions on Industry Electronics, 2012,59(2): 1171-1183.
[3] 杨代利,张宏立.基于全鲁棒滑模控制的永磁同步电机伺服系统矢量控制[J].电机与控制应用,2014,41(2): 19-22.
[4] 钱强,王淑红,宋泽琳.基于电流预测的内置式永磁同步电机矢量控制系统[J].电机与控制应用,2014,41(5): 31-34.
[5] 苏良昱.基于PCHD模型和滑模控制的表贴式永磁同步电机控制系统设计[J].电机与控制应用,2015,42(8): 39-43.
[6] ZMOOD D N, HOLMES D G, BODE G H.Frequency domain analysis of three-phase linear current regulators[J].IEEE Trans on Industrial Applications, 2001,37(2): 601-610.
[7] ZMOOD D N, HOLMES D G.Stationary frame current regulation of PWM inverters with zero steady-state error[J].IEEE Trans on Power Electronics, 2003,18(3): 814-822.
[8] KUKRER O.Discrete-time current control of voltage fed three-phase PWM inverters[J].IEEE Trans on Power Electronics, 1996,11(2): 260-269.
[9] 张晓光.永磁同步电机调速系统滑模变结构控制若干关键问题研究[D].哈尔滨: 哈尔滨工业大学,2014.
[10] 廖金国,花为,程明,等.一种永磁同步电机变占空比电流滞环控制策略[J].中国电机工程学报,2015,35(18): 4762-4770.
[11] 郑泽东,王奎,李永东,等.采用模型预测控制的交流电机电流控制器[J].电工技术学报,2013,28(11): 118-123.
[12] 任志斌.电动机的DSP控制技术与实践[M].北京: 中国电力出版社,2012.
[13] 王伟华,肖曦,丁有爽.永磁同步电机改进电流预测控制[J].电工技术学报,2013,28(3): 50-55.
[14] 尹忠刚,赵昌,钟彦儒,等.采用抗差扩展卡尔曼滤波器的感应电机转速估计方法[J].中国电机工程学报,2012,32(18): 152-159.
[15] 尹忠刚,张瑞峰,钟彦儒,等.基于抗差扩展卡尔曼滤波器的永磁同步电机转速估计策略[J].控制理论与应用,2012,29(7):921-927.
[16] 陈永军.低速大转矩永磁同步电机直接转矩控制研究[D].武汉:华中科技大学,2008.
[主要栏目]
·综述 ·研究与设计 ·变频与调速 ·控制与应用技术
·应用 ·运行与保护 ·新产品介绍 ·新能源与风力发电
·电机系统节能 ·测试技术与检测设备 ·行业信息
引领技术发展趋势 报道经典实用案例 反映行业最新动态
Current Predictive Control Based on Extended Kalman Filter*
LILingrui,XUMingzhu,GAOXudong
(College of Mechanical Engineering, Shijiazhuang Railway University, Shijiazhuang 050043, China)
In order to meet the high performance requirements of the system, high performance permanent magnet synchronous motor servo system required fast response current inner loop.Classical PID control was prone to lag, oscillation and so on.But the traditional predictive control could achieve fast tracking of the command signal without overshoot, which had a strong dependence on the accurate mathematical model of the control object.A predictive control method based on extended Kalman filter was proposed, the extended Kalman filter had the advantages of the estimation and filtering, which reduced the dependence of the predictive control on the mathematical model parameters of the control object.At the same time, compared with PID control, the improved method has realized the fast tracking of the command signal without overshoot, and the dynamic and static performance has been improved, motor at low speed running noise big problem also got a good solution.The experimental results showed that the algorithm was effective and practical.
permanent magnet synchronous motor (PMSM); extended Kalman filter (EKF); predictive control; PID control
国家自然科学基金面上项目(11372198);河北省教育厅科学技术重点项目(Z9900451)
李玲瑞(1990—),硕士研究生,研究方向为智能检测技术与控制系统。 许鸣珠(1967—),博士研究生,教授,研究方向为控制理论与应用。
TM 301.2
A
1673-6540(2017)03- 0001- 05
2016 -08 -31
猜你喜欢
防爆电机(2020年6期)2020-12-14
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年9期)2017-12-18
光学精密工程(2016年3期)2016-11-07
电源技术(2016年9期)2016-02-27
电源技术(2015年1期)2015-08-22
电源技术(2015年9期)2015-06-05
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
组合机床与自动化加工技术(2014年12期)2014-03-01
