一种抑制无刷直流电动机换相转矩脉动的新方法
2017-04-12 08:48魏嘉涛林荣文
电气技术 2017年3期
魏嘉涛 林荣文
(福州大学电气工程与自动化学院,福州 350108)
一种抑制无刷直流电动机换相转矩脉动的新方法
魏嘉涛 林荣文
(福州大学电气工程与自动化学院,福州 350108)
无刷直流电动机具有传统直流电动机的优点,可以低速大功率运行,可以省去减速机直接驱动大的负载,同时体积小、重量轻、出力大。因此,在各行各业得到了广泛的应用。但缺点是转矩脉动较大。在Z源逆变器的基础上,本文提出用一种改进型的Z源逆变器来抑制无刷直流电动机换相转矩脉动,改进型的Z源拓扑相对于传统拓扑减少了一个电容。因此可减小电路的体积及设计成本。该拓扑的升压能力与传统拓扑相当,并且不存在传统拓扑那样的起动回路,不存在起动冲击问题,无需采用软起动策略,起动过程简单。而且能够有效地抑制换相转矩脉动。
无刷直流电动机;转矩脉动;改进型Z源逆变器
无刷直流电动机具有输出转矩大、高效率、低效率、控制简单等特点,被广泛的应用在各行各业。转矩特性是电动机性能的重要指标,无刷直流电动机的换相、齿槽效应、电枢反应等,都会产生转矩脉动。齿槽效应、电枢反应产生的转矩脉动可以通过电动机设计来减少。因此,无刷直流电动机的转矩脉动主要来源于换相时产生的转矩脉动。有效地控制减少无刷直流电动机换相时刻产生的脉动,就能使电机稳定运行。
文献[2]分析了采用合理的PWM调制方式以及合适的重叠换相角减小电动机转矩脉动的理论。但是要精确计算导通角,否则可能增大转矩脉动。文献[3]分析了无刷直流电动机两种导通方式(二二导通和三三导通)下的转矩脉动。通过比较发现在低速时候采用二二导通,转矩脉动小;在高速的时候采用三三导通,转矩脉动小。文献[6]在对永磁直流电动机建立数学模型的基础上,对5种传统的PWM调制方式进行详细分析和比较。通过比较发现在抑制换相期间电磁转矩脉动方面PWM_ON调制方式比其他四种调制方式具有更好的控制效果。文献[7]提出改进型的双极性PWM控制方式,为了消除无刷直流电动机在非换相期间非换相电流续流的问题,采用4个功率开关管同时参与调制,但是4个开关管同时调制,增加了复杂性,同时可能导致同一相的上下开关管同时导通,增加了开关管的损耗。文献[9]采用直接转矩控制的方法。直接转矩控制的思想是以转矩为中心来进行综合控制,不仅控制转矩,还用于磁链量的控制和磁链自控制。这种方法用于抑制无刷直流电动机的转矩脉动很有效果,但是过于复杂,运用较少。
文献[8]提出了在三相逆变桥加SEPIC变换器和开关选择电路,从而有效地抑制了转矩脉动。文献[5]提出分段控制策略,即将重叠换相和直接转矩控制接合在了一起,共同发挥其优点来抑制转矩脉动。
本文提出一种新的无刷直流电动机控制驱动电路。该电路不仅能够有效地减少无刷直流电动机换相时产生的转矩脉动,还能够优化附加电路的结构,与传统的拓扑相比较,新拓扑不需要采用软起动策略,也不存在起动冲击的问题。
1 无刷直流电动机数学模型及转矩脉动分析
无刷直流电动机的等效电路图如图1所示。
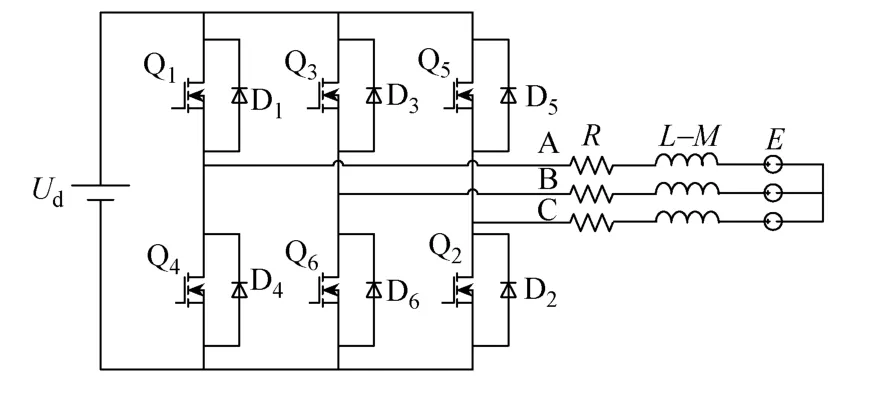
图1 无刷直流电动机等效电路
为了方便分析,忽略以下影响:①定子齿槽效应;②电枢反应;③电机内损耗的影响。Ud为直流侧电压源,R和L-M分别为电机相绕组的电阻和等效电感,Ex(x=a,b,c)为反电动势。电动机采用二二导通方式,即任何工况下都仅有两相绕组处于接通的状态,而第三相处于断开状态。由此可得电压平衡方程为

下面从能量传递的角度对无刷直流电动机的转矩来分析。电源吸收的电功率可分为两部分:一部分转换为损耗;另一部分转换为转子上的输出功率,而这一部分的功率称为电功率,即等于三相绕组的相反电势和相电流乘积之和。由此可得电磁转矩Te为

式中,Ω 为电动机机械角速度。
要保持电磁转矩恒定,在转速一定的情况下,Ea·Ia,Eb·Ib,Ec·Ic之和必须恒定。假设换相前A,C相导通,Ic=-Ia,Ib=0,Ec=-Ea,Ic=-I,Ec=-E。代入式(2)得Te=2EI/Ω,这时的电磁转矩为平均转矩。忽略相电阻并且认为相反电动势为理想的梯形波,此时可得三相相电流的变化率为
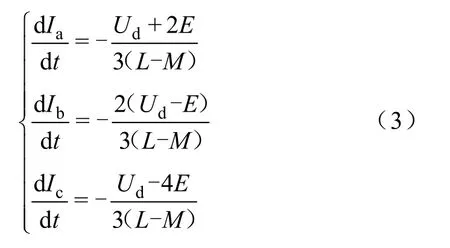
考虑各相电流换相前后的稳态值(Ia=I,Ib=0,Ic=-I),可得换相期间三相电流方程为

各相电流变化过程可近似如图2所示。从换相过程来看C相一直导通,电流应为恒定值I,要想消除转矩脉动,非换相相(C相)的电流应该保持不变,所以Ic的大小由Ud-4E来决定。


图2 各项电流的变化过程
(1)当Ud>4E时,T1>T2,换相期间转矩增大;
(2)当Ud=4E时,T1=T2,换相期间转矩不变;
(3)当Ud<4E时,T1<T2,换相期间转矩减小。
由此可见,在Ud=4E时,可以避免Ic的幅值的波动,不会产生换相时的转矩脉动。但是,Ud=4E不是电动机的稳定状态,是加速状态。当转速增加时反电动势E也会增大,此时就产生了转矩脉动。因此在稳定状态下,无刷直流电动机换相转矩脉动与转速有关。
2 Z源逆变器供电的无刷直流电动机驱动系统原理
在实际情况下,无刷直流电动机在换相的过程中,大部分情况下,非换相的相电流会下降。为了补偿下降电流,需通过Z源逆变器来提高母线电压补偿下降电流。从而抑制换相时的转矩脉动。Z 源逆变器引入Z源网络,把逆变器主电路和电源或者是负载耦合,电路如图3所示。在逆变器前面增加两个电感同时增加两个电容,组成Z源网络。Z源网络将直流电源与逆变器主电路耦合起来,这使得Z源逆变器可以工作于传统桥式逆变器所禁止的直通状态。当正常导通的时候,二极管导通,电源向负载供电,同时向电容充电。当换相时,由于电容电压高于电源电压,增加了换相时候的电流,来抵消由于关断相电流的下降速度比开通相电流的上升速度更快,形成非换相相电流形成了下降的情况。使得非换相相电流能够保持接近恒定,这样就减小了转矩的波动。
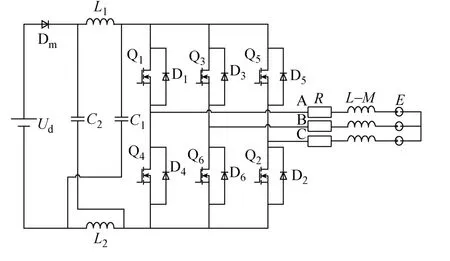
图3 传统型Z源网络的永磁无刷直流电动机控制驱动电路拓扑
Z源逆变器一共有9个开关状态,比传统型的Z源逆变器多1个开关状态。相比于传统型逆变器,Z源逆变器在传统型逆变器所具有的6个有效矢量和2个零电压矢量的基础上多了一个零电压矢量。与Z源逆变器不同的是,传统型三相逆变器是不允许工作在零电压矢量的,因为上下两个开关管同时导通会使逆变器受到损坏。但是Z源逆变器允许工作在零电压矢量条件下。当上下两个开关管导通时,电源没有直接作用在开关管,而是Z源网络与开关管相连。正是因为这个原因,Z源逆变器可以实现升压或者是降压。Z源逆变器等效电路图如图4(a)、(b)所示。

图4 Z源逆变器等效电路图
假设Z源逆变器的两个电感和两个电容是相等的(即L1=L2,C1=C2),则这是对称的Z源网络。因此,Z源网络对应的两个电感、两个电容电压相等,即

假设一个开关周期为Ts,并且开关得频率远大于电源电压频率,所以在一个开关周期中电容电压可以被视为恒定值Uc。
假设在一个开关周期中非直通状态持续的时间为T1,在非直通状态下,二极管Dm导通,如图4(a)所示。Z源网络电感L1上的电压为

在直通状态下,二极管Dm截止,此状态的持续时间T0=Ts-T1,此时阻抗网络电感L1上的电压为

根据电感伏秒积平衡,在一个开关周期Ts中,开关导通时通过电感的电流增加量和开关断开时电感的电流减少量是相等的。设直通的占空比为D0,可以求得D0=T0/Ts。
那么有效状态的持续时间为(1-D0)Ts,而直通状态的时间为D0Ts,可得Z源逆变器的电容电压Uc与输入电压Ud之间的关系:

在非直通状态下,逆变桥直流链电压Udc被写成:

式中,B是直通零电压下的升压因子,进一步分析可得Z源并网逆变器输出相电压基波峰值Um与直流输入电压Ud之间的关系为

式中,m是逆变器的调制因子。通过选取合适的m和B就能够实现输出电压的升高和降低的功能,相当于一种主动形态的Buck-Boost变换电路。
3 改进型Z源逆变器原理
本文所提出的改进型Z源并网逆变器电路如图5所示。与传统型Z源逆变器不同,改进型Z源逆变器少了一个电容,多了个二极管。同样,按直通状态和非直通状态建立改进型Z源并网逆变器的等效模型如图6(a)、(b)所示。

图5 改进型Z源网络无刷直流电动机驱动电路
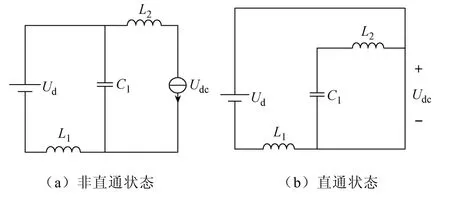
图6 改进型Z源并网逆变器的等效模型
当Z源逆变器工作在非直通状态时,如图6(a)所示。此时,Dm1导通,Dm2关断。电压源向电容充电同时也向负载供电。此时,阻抗网络电感L1上的电压为

阻抗网络电感L2上的电压为

当Z源逆变器工作在非直通状态时,如图6(a)所示。此时,Dm2导通,Dm1关断。与非直通状态比较下Udc的电压为零,因此逆变桥可以短路线等效。此时二极管Dm1截止,为了给电感L1上的电流提供通路,迫使Dm2导通,阻抗网络电感L1,L2上的电压分别为:UL1=Ud,UL2=Uc。
令开关周期为Ts,直通占空比为D0,那么一个开关周期的直通时间为D0Ts,非直通时间为(1-D0)Ts,根据电感L1,L2的伏秒平衡关系,可得

由此可知,改进型的Z源逆变器和传统型的Z源逆变器升压能力比较接近,但是传统型的Z源逆变器存在起动冲击等问题。而改进型Z源逆变器减少了一个大容量的电容,减少了控制板的体积,同时也不存在类似于传统Z源逆变器的起动回路,也无需采用软起动策略。
4 实验仿真
利用Matlab的Simulink对无刷直流电动机采用Z源逆变器和改进型Z源逆变器进行了仿真。仿真实验的电动机参数为:额定电压220V,额定转速2500r/min,C1=5×10-4F,L1=L2=5×10-4H,相电阻R=1Ω,相电感L=20mH,电动机的转动惯量J= 5×10-3kg·m2,反电势系数Kv=0.4536V/rpm,给定2N的负载转矩。改进型Z源逆变器的仿真图如图7所示。

图7 系统仿真模型
传统型Z源逆变器输出波形如图8(a)、(b)所示。

图8 传统型Z源逆变器
改进型Z源逆变器输出波形如图9(a)、(b)所示。

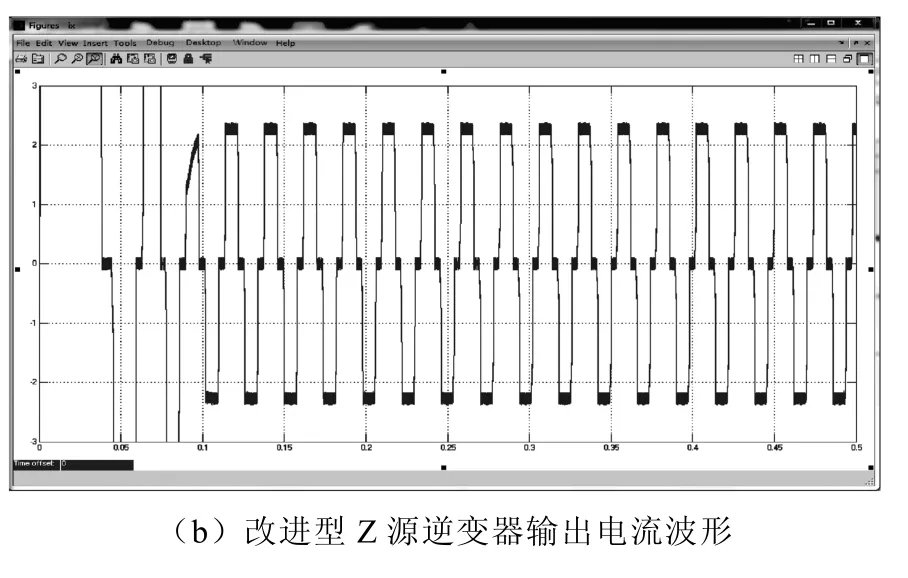
图9 改进型Z源逆变器输出波形
5 结论
对比两种逆变器的输出电流和输出转矩波形可得出结论:改进型Z源逆变器不仅减少了输出转矩脉动,而且减少了电流脉动。同时相比于传统型的Z源逆变器,改进型Z源逆变器在升压能力基本不变的情况下,减小了控制电路的体积,同时不用采用软起动,也解决了传统Z源逆变器输入电流断续问题。在实际运用中能优化电路具有一定的实用价值。
[1] 高奇. Z源逆变器的主电路研究[D]. 杭州: 浙江大学, 2005.
[2] 王淑红, 熊光煜. 无刷直流电机换相转矩脉动减小及动态仿真[J]. 电机与控制学报, 2008, 12(2): 169-173.
[3] 陈震, 薛晓明. 180°导通方式无刷直流电机换相转矩脉动研究[J]. 电测与仪表, 2016, 53(1): 57-61, 74.
[4] 韦鲲. 永磁无刷直流电机电磁转矩脉动抑制技术的研究[D]. 杭州: 浙江大学, 2005.
[5] 石坚, 李铁才. 一种消除无刷直流电动机换相转矩脉动的PWM调制策略[J]. 中国电机工程学报, 2012, 32(24): 110-116.
[6] 孙鹿, 陶宏敬. 永磁无刷直流电PWM_ON_PWM调制方式研究[J]. 自动化技术应用, 2012(7): 42-45, 53.
[7] 李自成, 程善美, 蔡凯, 等. 减小无刷直流电机转矩脉动的PWM新方式[J]. 华中科技大学学报(自然科学版), 2009, 11: 1-4.
[8] 刘义华, 沈锦飞. 基于SEPIC变换器无刷直流电机转矩脉动的研究[J]. 电力电子技术, 2012, 46(7): 90-92.
[9] 夏长亮, 张茂华, 王迎发, 等. 永磁无刷直流电机直接转矩控制[J]. 中国电机工程学报, 2008, 28(6): 104-109.
[10] 夏加宽, 韩行一, 王成元. 非理想反电动势的无刷直流电机的转矩脉动抑制策略研究[J]. 电气技术, 2009(9): 14-16.
[11] 谭建成. 无刷直流电动机技术发展动向[J]. 电气技术, 2006(7): 54-57.
The New Approach of Reducing Commutation Torque Ripple for Brushless DC Motor
Wei Jiatao Lin Rongwen
(Electrical Engineering and Automation Institute of Fuzhou University, Fuzhou 350108)
The brushless DC motor has the advantages of traditional DC motor which can run for high power at low speed and save reducer direct drive big load. moreover, it has the characteristic of small volume, light weight and large output. So, it has been widely used in all walks of life. However, the disadvantage is that the torque ripple is bigger. Based on the Z-source inverter, this paper proposes a novel commutation torque ripple reduction strategy for brushless DC motor (BLDCM). Modified Z-source topology compared with the traditional topology reduces one capacitor. It can reduce the volume of circuit and the design cost, boosting capacity and the traditional topology of the topology, and there is no traditional topology of the circuit and no start impact problem, it don’t need to adopt the strategy of soft start and start the process simple. Furthermore it can effectively inhibit the commutation torque ripple.
brushless DC motor; commutation torque ripple; the modified Z-source inverter
猜你喜欢
一重技术(2021年5期)2022-01-18
新型工业化(2021年8期)2021-10-23
电子与封装(2021年7期)2021-07-29
西藏艺术研究(2021年4期)2021-06-02
今日农业(2020年20期)2020-12-15
测控技术(2018年4期)2018-11-25
体育科技(2016年2期)2016-02-28
电机与控制应用(2015年2期)2015-03-01
创业家(2015年1期)2015-02-27
电测与仪表(2014年21期)2014-04-04